Изобретение относится к обработке металлов давлением, в частности, для механизации штамповки на молоте.
Известен манипулятор для штамповочного молота, содержащий захваты в виде бесконечных цепей, установленных по обе стороны позиций штампа, и для каждой цепи захватов механизмы межпозиционного перемещения и механизмы вертикального перемещения, при этом механизм межпозиционного перемещения включает подпружиненную, снабженную копиром штангу, шарнирно закрепленную в верхней части, и коромысло с зубом, установленное на штанге, а механизм вертикального перемещения включает шарнирно закрепленную в верхней части клавишу с рычажным механизмом и выходным звеном для связи с цепью захватов, при этом штанги и клавиши установлены под углом к траектории движения ударной части [1].
Недостатки. Компоновка манипулятора относительно ударной части молота (расположение штанг, клавиш) вызывает односторонний износ ее направляющих и смещение верхней половины штампа относительно нижней. Вследствие этого возникает необходимость в сравнительно частом регулировании траектории движения ударной части во избежание брака поковок.
Пружина, обеспечивающая отслеживание копира и подъем рук манипулятора, принадлежит одновременно к разным составляющим манипулятора, что обуславливает ее работу с максимально возможным диапазоном усилий в высокоцикличном режиме. При этом параметры пружины ограничены конструктивными возможностями. Все это быстро приводит ее к усталостному разрушению.
Использование в составе механизма межпозиционного перемещения цепи захватов снижает его надежность:
- из-за сбоев, вызванных дефектами цепи захватов, возникающих от выплеска металла облоя в цепь;
- из-за сбоев при поперечном смещении относительно друг друга зуба (входит в состав механизма межпозиционного перемещения) и цепи захватов, находящихся в зацеплении.
Наличие инерционных сил (в момент опускания цепи захватов ускорение достигает 90 м/с2) не позволяет обеспечить необходимые характеристики движения захватов в момент опускания заготовки в позицию из-за отрыва клавиши от ударной части. Увеличение силы пружины, обеспечивающей постоянство контакта клавиши с ударной частью, не исключает отрыва.
Решаемая задача - повышение надежности манипулятора за счет оптимизации нагрузок.
Оптимизация нагрузок на элементы манипулятора обусловлена тем, что изменилась плоскость взаимодействия штанг и клавиш с ударной частью молота. Штанги и клавиши развернули относительно ударной части, вследствие чего они охватывают ее с противоположных сторон. При этом возникающие нагрузки замыкаются на ударной части и исключают односторонний износ ее направляющих.
Кроме того, узлы манипулятора обособлены на три группы: собственно "руки" манипулятора, механизм межпозиционного перемещения и механизм вертикального перемещения "рук" манипулятора. В каждой группе детали выполняют однообразные функции в более оптимальных условиях, при этом удалось исключить пружину, как наиболее уязвимый элемент конструкции и фактор дополнительных нагрузок.
Дополнительные эффекты.
Штанги и клавиши, как основообразующие элементы, группируют вокруг себя соответственно механизмы межпозиционного перемещения и вертикального перемещения, что предопределяет компоновку манипулятора. Новая компоновка манипулятора позволила органично вписать его в габарит молота и добиться технического и визуального единства двух машин, а также раскрывает пространства для организации возможности мобильной переналадки манипулятора при изменении длины изделия.
Из-за того, что изменилась плоскость взаимодействия штанг и клавиш с ударной частью молота, удалось выполнить сочленение молота и манипулятора в виде силового подвижного контакта, что дает при работе независимость колебания и вибрации как молота, так и манипулятора. Выполнение механизма вертикального перемещения не на основе пружины позволяет снизить колебания манипулятора ниже допустимых из условий эксплуатации молота. Это совместно с независимостью колебаний манипулятора от колебаний молота исключает необходимость устройства специального фундамента под манипулятором.
Поставленная задача достигается манипулятором для штамповочного молота, содержащим захваты в виде бесконечных цепей, установленных по обе стороны позиций штампа, и для каждой цепи захватов механизмы межпозиционного перемещения их и механизмы вертикального перемещения, при этом механизм межпозиционного перемещения включает подпружиненную, снабженную копиром штангу, шарнирно закрепленную в верхней части, и коромысло с зубом, установленное на штанге, а механизм вертикального перемещения включает шарнирно закрепленную в верхней части клавишу с рычажным механизмом и выходным звеном для связи с цепью захватов, при этом штанги и клавиши установлены под углом к траектории движения ударной части, в котором, согласно изобретению, выполнено следующее: штанги и клавиши, соответственно цепям захватов, установлены с противоположных сторон ударной части молота, механизм межпозиционного перемещения выполнен на основе дополнительной замкнутой зубчатой цепи, кинематически связанной с цепью захватов, коромысло подпружинено, снабжено иглой с противоположной стороны от зуба, установлено с возможностью зацепления зубом с дополнительной цепью и снабжено фиксатором положения, подпружиненным в сторону ударной части с ответным отверстием под иглу, а механизм вертикального перемещения снабжен дополнительной клавишей, обе клавиши профилированы и связаны между собой снизу с возможностью поочередного взаимодействия или слежения за ударной частью в зависимости от направления ее движения, например, равноплечим рычагом, при этом, выходное звено этого механизма снабжено консолью для периодического воздействия на коромысло.
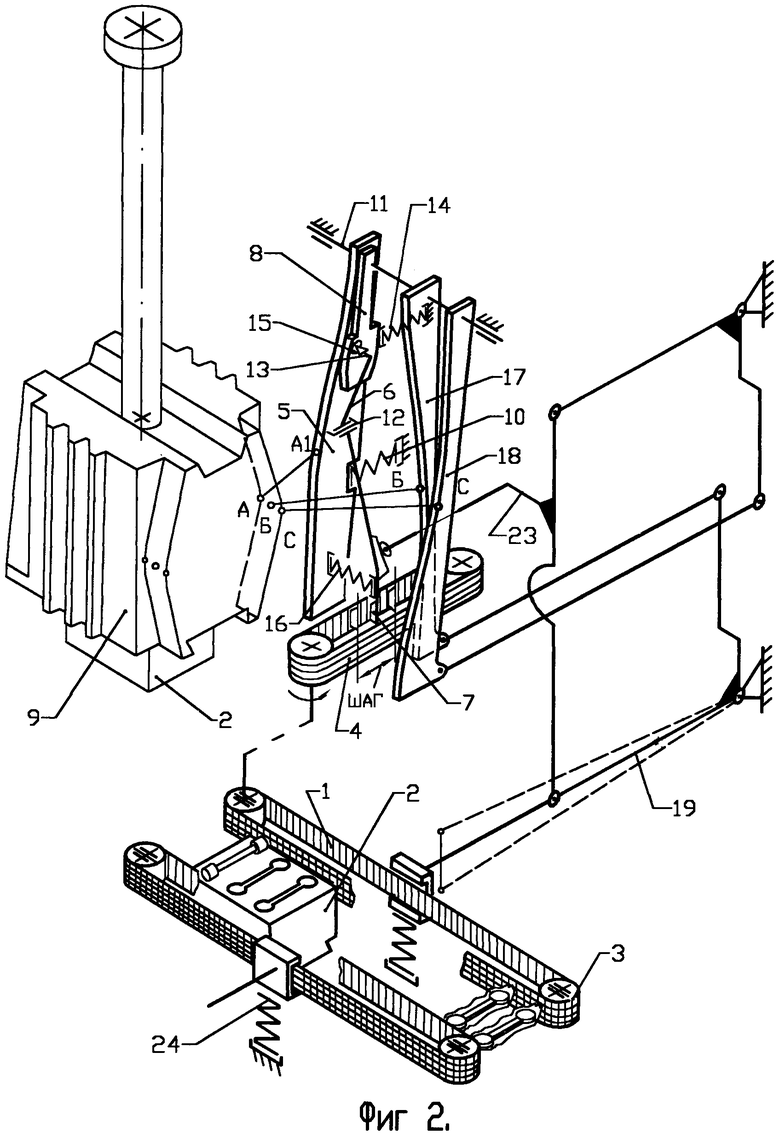
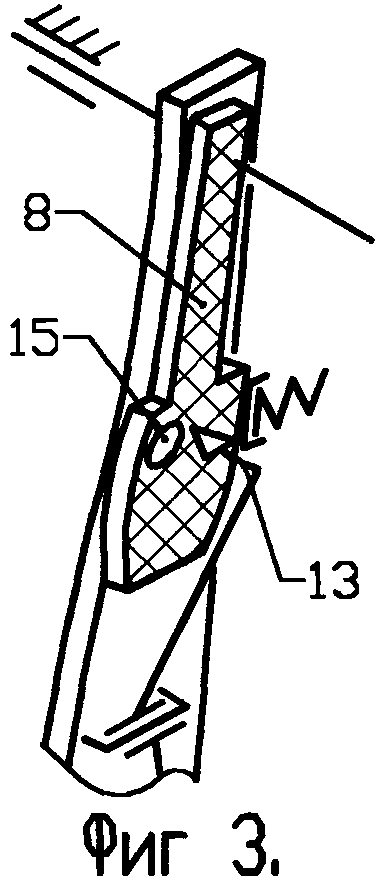
На фиг. 1 изображена кинематическая схема манипулятора; на фиг. 2 - то же, но с видоизмененной системой взаимоположения клавиш; на фиг. 3 - фиксатор положения коромысла в момент зацепления зуба коромысла с дополнительной цепью.
Манипулятор к штамповочному молоту содержит захваты в виде бесконечных цепей 1 ("руки" манипулятора), установленных по обе стороны штампа 2 на пути течения металла облоя, а также механизмы межпозиционного и вертикального перемещения захватов. Цепь 1 входит в состав "руки" манипулятора и имеет свою станцию натяжения 3, а жесткость цепи в момент выплеска облоя достигается замыканием нагрузки на штамп (не показано).
Механизм межпозиционного перемещения захватов включает бесконечную зубчатую цепь 4, штангу 5, коромысло 6 с зубом 7 для зацепления с цепью 4 и фиксатор 8 коромысла 6 в положении зацепления с цепью 4 и наоборот. Между захватами 1 и цепью 4 установлена кинематическая связь (на фиг. показана схематично). Наличие гибкой кинематической связи рабочей цепи 1 с цепью 4, входящей в механизм межпозиционного перемещения, способствует мобильной переналадке манипулятора в случае изменения длины изделия. Штанга 5 установлена в контакте с ударной частью молота 9 в т. А, нагружена в ее сторону пружиной 10 и профилирована так, что в верхней части штанга 5 поверхностью контакта расположена наклонно к траектории движения ударной части 9 (пересекает ее), а в нижней части совпадает с траекторией ее движения. Штанга 5 шарнирно закреплена вверху к станине (на фиг не показана), например на оси 11. Коромысло 6 установлено на оси 12 к штанге 5, снабжено иглой 13 с противоположной от зуба 7 стороны. Здесь же к штанге шарнирно закреплен и нагружен пружиной 14 в сторону ударной части 9 молота фиксатор 8 с ответным под иглу 13 отверстием 15. Коромысло 6 нагружено пружиной 16 так, что игла 13 имеет возможность погружаться в отверстие 15, если совпадает с ним, при этом зуб 7 отводится от цепи 4. Когда ударная часть 9 сходит с фиксатора 8, он остается заблокированным от перемещения до тех пор, пока зуб 7 не находится в зацеплении с цепью 4; т.е. игла 13 расположена в отверстии 15.
Механизм вертикального перемещения цепей 1 включает шарнирно закрепленные на станине (не показано) пару клавиш 17, 18 и рычажный механизм с выходным звеном 19 для связи с цепью 1, при этом клавиши профилированы и связаны снизу между собой системой взаимоположения с возможностью поочередного слежения за ударной частью молота или взаимодействия с ней в зависимости от направления ее движения. Такая связь между клавишами осуществлена рычажным механизмом, как изображено на фиг. 2, или равноплечим рычагом 20, см. фиг. 1, который связан с клавишами тягами 21. Выходное звено 19 соединено с рычагом 20 посредством тяги 22, а также звено 19 снабжено консолью 23 с роликом на конце для контакта с коромыслом 6. Для компенсации веса "рук" 1 манипулятора установлены пружины 24, что исключает дополнительную нагрузку на клавиши 17, 18.
Устройство работает следующим образом. Согласованность всех перемещений в манипуляторе достигается за счет профилей контактирующих поверхностей штанги 5 и клавиш 17, 18 с ударной частью 9 молота.
а. Ударная часть молота 9 движется вниз. Клавиша 17 находится в режиме слежения за ударной частью 9.
В начале движения ударной части клавиша 18 выстаивает, а штанга 5 перемещается вправо, увлекая коромысло 6 с зубом 7 на один шаг (подготовка к перемещению цепи 4). Затем выстаивает штанга 5, а клавиша 18 сдвигается вправо, при этом через ряд рычагов цепь 1 осаживается, укладывая заготовки в позиции, звено 23 также опускается, воздействуя на коромысло 6, вследствие чего зуб 7 входит в зацепление с цепью 4. В это время противоположное плечо коромысла 6 приподнимается, т.е. игла 13 выводится из отверстия 15, фиксатор 8 освобождается и пружина 14 сдвигает его (см. фиг. 3). Игла 13 остается на поверхности фиксатора, и, таким образом, положение зацепления штанги 5 с цепью 4 фиксируется. Перед моментом штамповки поверхность контакта клавиши 18 и траектория движения ударной части совпадают: клавиша 18 останавливается и все движения в манипуляторе прекращаются.
б. Ударная часть молота 9 движется вверх. Клавиша 18 находится в режиме слежения. В начале подъема ударной части 9 штанга 5 выстаивает, а клавиша 17 перемещается вправо. Движение клавиши 17 преобразуется рычажным механизмом в движение вверх выходного звена 19, который поднимает цепь 1, извлекая заготовки из позиций. Звено 23 также поднимается, освобождая коромысло 6, которое теперь находится только на фиксаторе 8. После этого выстаивает клавиша 17, а штанга 5, из-за своего профиля, имеет возможность сдвигаться влево, к ударной части, под действием пружины 10. Так как штанга 5 зубом 7 находится в зацеплении с цепью 4, то последняя перемещается (по стрелке см. фиг.) на один шаг. Цепь 1 также перемещается на один шаг из-за наличия кинематической связи с цепью 4. На заключительном участке траектории ударная часть встречается с фиксатором 8 и сдвигает его вправо. Отверстие 15 совмещается с иглой 13 и пружиной 16, коромысло отклоняется. В итоге игла 13 погружается в отверстие 15, блокируя фиксатор 8, а зуб 7 отводится от цепи 4.
Клавиши 17, 18 работают совместно так, что когда одна перемещается под действием ударной части молота, то другая следит (находится в контакте) за соответствующей опорной поверхностью на ударной части: в районе точки Б или точки С. Клавиша 17 или 18 взаимодействует с ударной частью или следит за ней поочередно, в зависимости от направления движения последней. При движении вниз ударная часть 9 отклоняет клавишу 18 вправо. Клавиша 18 поворачивает равноплечий рычаг 20, при этом другое плечо рычага 20 перемещает клавишу 17, обеспечивая сохранность контакта ее с ударной частью 9. При движении вверх ударной части уже другая клавиша, т.е. клавиша 17 находится в силовом взаимодействии с ударной частью, а клавиша 18 находится в режиме слежения, при котором имеет место постоянство контакта с опорной поверхностью.
Ударная часть 9 на коротком расстоянии воздействует на ту или иную клавишу, что сопровождается высоким ускорением рук манипулятора (цепи захватов) и, следовательно, появляются значительные силы инерции. Сила инерции передается через равноплечий рычаг 20 на другую клавишу, находящуюся в режиме слежения, и дальше на опорную поверхность, т.е. сила инерции замыкается на ударную часть. В результате исключаются искажения заданных характеристик движения "рук" манипулятора. Такая организация работы системы опускания "рук" манипулятора позволила избавиться от дополнительных нагрузок, возникающих от пружины, которая использована в прототипе в системе опускания подъема "рук".
Штанга 5 находится во взаимодействии с ударной частью 9, под действием пружины 10, но проблем с динамикой не возникает, т.к. взаимодействие со штангой происходит в момент, когда скорость движения ударной части не высока, а время взаимодействия продолжительнее. А главное, нагрузка на штангу небольшая и, следовательно, мощность пружины, необходимая для отслеживания копира на штанге, не велика.
Источник информации
1. Авторское свидетельство СССР 2036040, МКИ B 21B 13/10, опублик. 27.05.95.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР К ШТАМПОВОЧНОМУ МОЛОТУ | 1990 |
|
RU2036040C1 |
| ПРИВОД ОТ УДАРНОЙ ЧАСТИ ШТАМПОВОЧНОГО МОЛОТА | 2003 |
|
RU2266797C2 |
| УСТРОЙСТВО ОТБОРА МОЩНОСТИ ОТ УДАРНОЙ ЧАСТИ ШТАМПОВОЧНОГО МОЛОТА | 2000 |
|
RU2192935C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| Манипулятор | 1981 |
|
SU1013257A2 |
| Манипулятор | 1980 |
|
SU1044457A1 |
| Манипулятор | 1985 |
|
SU1265040A1 |
| МЕХАНИЗИРОВАННЫЙ БЛОК ИНСТРУМЕНТОВ ДЛЯ ОБРАБОТКИ ЗАГОТОВОК НА ПРЕССЕ И УСТРОЙСТВО ЕГО ЗАМЕНЫ | 2000 |
|
RU2221696C2 |
| Ручной кантователь | 1982 |
|
SU1026921A1 |
| Автомат для штамповки деталей | 1991 |
|
SU1811947A1 |
Изобретение относится к обработке металлов давлением, в частности для механизации штамповки на молоте. Манипулятор содержит захваты в виде бесконечных цепей, установленных по обе стороны позиций штампа, и для каждой цепи захватов механизмы межпозиционного перемещения их и механизмы вертикального перемещения. При этом механизм межпозиционного перемещения включает подпружиненную, снабженную копиром штангу, шарнирно закрепленную в верхней части, и коромысло с зубом, установленное на штанге. А механизм вертикального перемещения включает шарнирно закрепленные в верхней части клавиши с рычажным механизмом и выходным звеном для связи с цепью захватов. При этом штанги и клавиши установлены под углом к траектории движения ударной части. Клавиши профилированы и связаны между собой снизу с возможностью поочередного взаимодействия или слежения за ударной частью в зависимости от направления ее движения равноплечим рычагом. При этом выходное звено этого механизма снабжено консолью для периодического воздействия на коромысло. Изобретение позволит повысить надежность манипулятора за счет оптимизации нагрузок. 3 ил.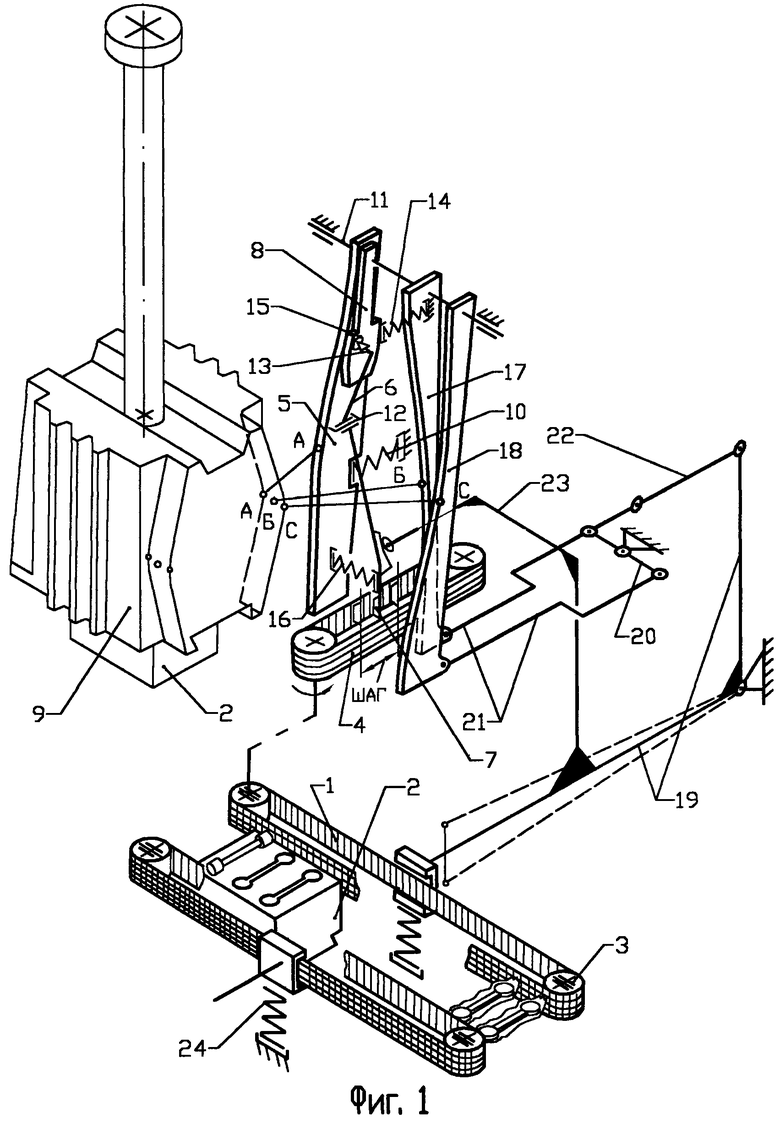
Манипулятор для штамповочного молота, содержащий захваты в виде бесконечных цепей, установленных по обе стороны позиций штампа, и для каждой цепи захватов механизмы межпозиционного перемещения их и механизмы вертикального перемещения, при этом механизм межпозиционного перемещения включает подпружиненную снабженную копиром штангу, шарнирно закрепленную в верхней части, и коромысло с зубом, установленное на штанге, а механизм вертикального перемещения включает шарнирно закрепленную в верхней части клавишу с рычажным механизмом и выходным звеном для связи с цепью захватов, при этом штанги и клавиши установлены под углом к траектории движения ударной части, отличающийся тем, что штанги и клавиши соответственно цепям захватов установлены с противоположных сторон ударной части молота, механизм межпозиционного перемещения выполнен на основе дополнительной зубчатой цепи, кинематически связанной с цепью захватов, коромысло подпружинено, снабжено иглой с противоположной стороны от зуба, установлено с возможностью зацепления зубом с дополнительной цепью и снабжено фиксатором положения, подпружиненным в сторону ударной части, с ответным отверстием под иглу, а механизм вертикального перемещения снабжен дополнительной клавишей, обе клавиши профилированы и связаны между собой снизу с возможностью поочередного взаимодействия с ударной частью или слежения за ней в зависимости от направления ее движения, например, равноплечим рычагом, при этом выходное звено этого механизма снабжено консолью для периодического воздействия на коромысло.
| МАНИПУЛЯТОР К ШТАМПОВОЧНОМУ МОЛОТУ | 1990 |
|
RU2036040C1 |
| SU 923693, 30.04.1982 | |||
| US 4989444, 05.02.1991. | |||

