Изобретение относится к машинам обработки металлов давлением, в частности, для механизации штамповки на молоте.
Известно устройство (прототип) отбора мощности от ударной части штамповочного молота, содержащее шарнирно закрепленную в верхней части клавишу, расположенную в контакте с ударной частью молота наклонно по отношению к траектории ее движения и предназначенную для приведения в движение ведомого механизма посредством рычажных связей [1].
Недостатки. Контакт клавиши с ударной частью молота для отслеживания профиля копира, который выполнен на поверхности клавиши, обеспечивается пружиной.
Чрезвычайно высокое ускорение ведомого механизма, связанного с клавишей, приводит к возникновению инерционных сил в механизме и, следовательно, к отрыву клавиши от ударной части, несмотря на противодействие пружины. Увеличение же силы пружины вызывает повышение нагрузки на клавишу и, как следствие, рост динамической составляющей усилий на устройство. Следовательно, известная схема (с пружиной) не отвечает потребностям механизмов, работающих с высокими ускорениями и массами. Кроме того, отрыв клавиши от ударной части молота искажает предусмотренные характеристики движения конечного звена устройства.
Задача, решаемая изобретением, - исключить влияние сил инерции на характеристику движения конечного звена устройства, что обусловлено замыканием динамических усилий на ударную часть молота.
Поставленная задача достигается тем, что устройство отбора мощности от ударной части штамповочного молота, содержащее закрепленную в верхней части клавишу, расположенную в контакте с ударной частью молота наклонно по отношению к траектории ее движения и предназначенную для приведения в движение ведомого механизма, посредством рычажных связей, снабжено клавишей, установленной параллельно упомянутой выше клавише, при этом обе клавиши выполнены профилированными и снизу связаны между собой посредством системы взаимоположения для обеспечения постоянного контакта упомянутых клавиш с ударной частью штамповочного молота и одновременно поочередного воздействия последней, в зависимости от направления движения ее, на ту или другую клавишу.
При этом система взаимоположения выполнена в виде двух идентичных рычажных механизмов, входные звенья которых шарнирно соединены с клавишами, выходные звенья установлены на общей оси, а крайние звенья расположены по обе стороны от упомянутой общей оси.
Кроме того, система взаимоположения может быть выполнена в виде пары зубчатых реек, соединенных с клавишами, и зубчатого колеса, расположенного между упомянутыми зубчатыми рейками.
Целесообразно в качестве ведомого механизма использовать манипулятор для штамповочного молота.
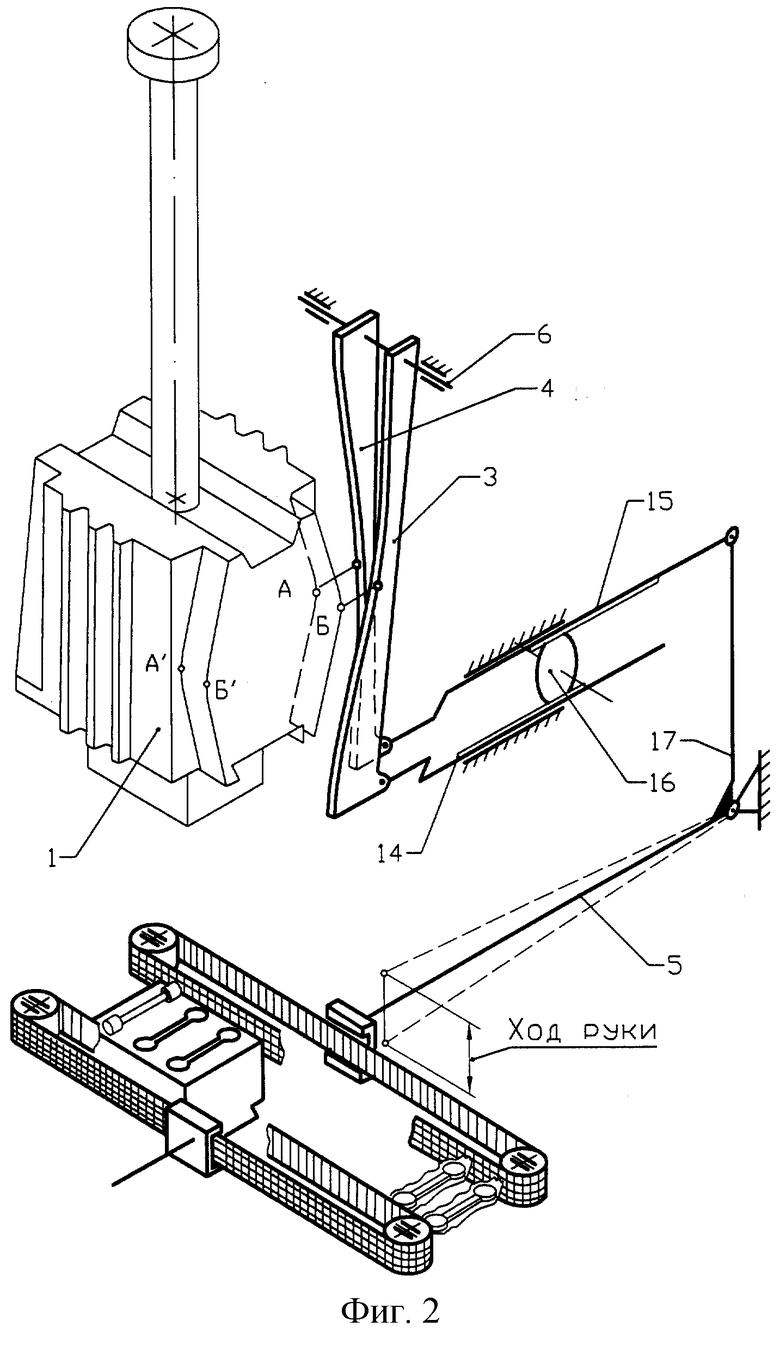
На фиг. 1 изображена кинематическая схема устройства; на фиг.2 - то же устройство с видоизмененной системой взаимоположения.
Устройство отбора мощности от ударной части 1 молота для ведомого механизма, например рук 2 манипулятора, содержит пару клавиш 3 и 4, систему взаимоположения их относительно друг друга и рычажную связь 5 к руке манипулятора в виде рычага второго ряда. Каждая клавиша имеет шарнирную связь со станиной (не показана) устройства или связаны между собой и со станиной посредством оси 6.
Снизу клавиши связаны относительно друг друга системой взаимоположения. Система взаимоположения обуславливает поочередность работы клавиш. Клавиша, на которую воздействует ударная часть (режим отбора мощности) молота является ведущей по отношению к другой клавише - ведомой.
Пара клавиш 3 и 4 установлена в контакте с ударной частью 1 молота (на фиг. обозначены точки контакта А, Б или А, Б и А', Б', если ведомых механизмов два) и наклонно к ее траектории движения, при этом опорная поверхность движущихся клавиш расположена вблизи указанных точек. Клавиши профилированы (снабжены копирами), что совместно с системой взаимоположения определяет постоянный контакт (без отрывов, обусловленных наличием динамической составляющей усилий на устройство) одновременно обеих клавиш с ударной частью и поочередность воздействия последней, в зависимости от направления ее движения, с одной, а потом с другой клавишей.
Профиль клавиш выполнен исходя из условий:
- угол подъема контактной поверхности обеспечивает требуемую характеристику движения ведомого механизма;
- клавиши, находящиеся в разных режимах взаимодействия с ударной частью 1, должны выполнять движение с одной и той же характеристикой, но в противоположных направлениях.
Система взаимоположения может быть выполнена, например, на основе рычажных механизмов, или реечного механизма, или равноплечевого рычага:
- рычажные механизмы для той и другой клавиши идентичны, при этом входные звенья 7, 8 шарнирно соединены с клавишами, выходные звенья 9, 10 установлены на общей оси 11, являющейся конечным звеном устройства для связи с рычагом 5. Крайние звенья 12, 13 рычажных механизмов расположены по обе стороны от упомянутой общей оси 11 и закреплены на шарнирных опорах к станине (не показано);
- к обеим клавишам 3 и 4 снизу на шарнире прикреплено по зубчатой рейке 14, 15 (см. фиг.2). Между зубчатыми рейками в контакте установлено зубчатое колесо 16 на валу. Для воздействия на рычаг 5, управляющий положением руки 2 манипулятора, установлена связь между одной из клавиш и вышеупомянутым рычагом в виде звена 17.
Устройство работает следующим образом.
Контактирующая с ударной частью 1 молота и расположенная на пути ее движения под углом к траектории ее движения клавиша перемещается вправо. При движении вниз ударной части перемещаемой клавишей является клавиша 3, при движении вверх - клавиша 4. Перемещаемая, например, клавиша 3 увлекает входное звено 7 и связанное с ним выходное звено 9. Выходное звено 9, качнувшись на звене 12, сдвигает вниз ось 11 - конечное звено. Ось 11 нагружает рычаг 5, который перемещает руку 2 вниз. Оба рычажных механизма связаны между собой общей осью 11. Поэтому под действием оси 11 звено 10 смещается вниз, качнувшись на звене 13. Звено 13 перемещается в направлении, противоположном движению звена 12. Входные звенья 7 и 8, в итоге, перемещаются одновременно в противоположных направлениях. В результате, насколько клавиша 3 сдвигается под действием ударной части 1 вправо, настолько же клавиша 4 перемещается в сторону ударной части, чем обеспечивается с последней постоянство контакта обеих клавиш.
Динамические усилия, обуславливающие возможность отрыва перемещаемой ударной частью клавиши, через рычажные механизмы (систему взаимоположения) и другую, ведомую клавишу передаются на ударную часть.
Поэтому невозможен отрыв перемещаемой (испытывающей действие динамической силы) клавиши от ударной части и обеспечивается следование конечного звена 11 строго по траектории, определяемой профилем клавиш.
При движении ударной части 1 вверх воздействие последней производится на клавишу 4. В результате обеспечивается поочередно возвратно-поступательное перемещение конечного звена устройства, связанного с ведомым механизмом.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Авторские свидетельство СССР 2036040, MRU В 21 B 13/10, опубликовано 27.05.95.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ ШТАМПОВОЧНОГО МОЛОТА | 2000 |
|
RU2176171C1 |
| ПРИВОД ОТ УДАРНОЙ ЧАСТИ ШТАМПОВОЧНОГО МОЛОТА | 2003 |
|
RU2266797C2 |
| МЕХАНИЗИРОВАННЫЙ БЛОК ИНСТРУМЕНТОВ ДЛЯ ОБРАБОТКИ ЗАГОТОВОК НА ПРЕССЕ И УСТРОЙСТВО ЕГО ЗАМЕНЫ | 2000 |
|
RU2221696C2 |
| Устройство для раскрытия клапанов коробок | 1983 |
|
SU1150165A1 |
| МАНИПУЛЯТОР К ШТАМПОВОЧНОМУ МОЛОТУ | 1990 |
|
RU2036040C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ИЗ ПОЛОСЫ ПЛОСКИХ ПОКОВОК С УДЛИНЕННОЙ ОСЬЮ | 2000 |
|
RU2195383C2 |
| СПОСОБ ШЛИФОВАНИЯ | 1996 |
|
RU2136476C1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Промышленный робот | 1988 |
|
SU1713797A1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
Изобретение относится к обработке металлов давлением и может быть использовано для механизации штамповки на молоте. В контакте с ударной частью молота и наклонно по отношению к траектории ее движения расположена шарнирно закрепленная своей верхней частью клавиша, предназначенная для приведения в движение ведомого механизма посредством рычажных связей. Параллельно упомянутой выше клавише установлена вторая клавиша. Обе клавиши профилированы и снизу связаны между собой системой взаимоположения для обеспечения постоянного контакта клавиш с ударной частью молота и одновременно поочередного воздействия ее на одну из клавиш. Система взаимоположения может быть выполнена в виде двух идентичных рычажных механизмов или в виде пары зубчатых реек и зубчатого колеса. В результате исключается влияние сил инерции на характеристику движения конечного звена устройства. 3 з.п.ф-лы, 2 ил.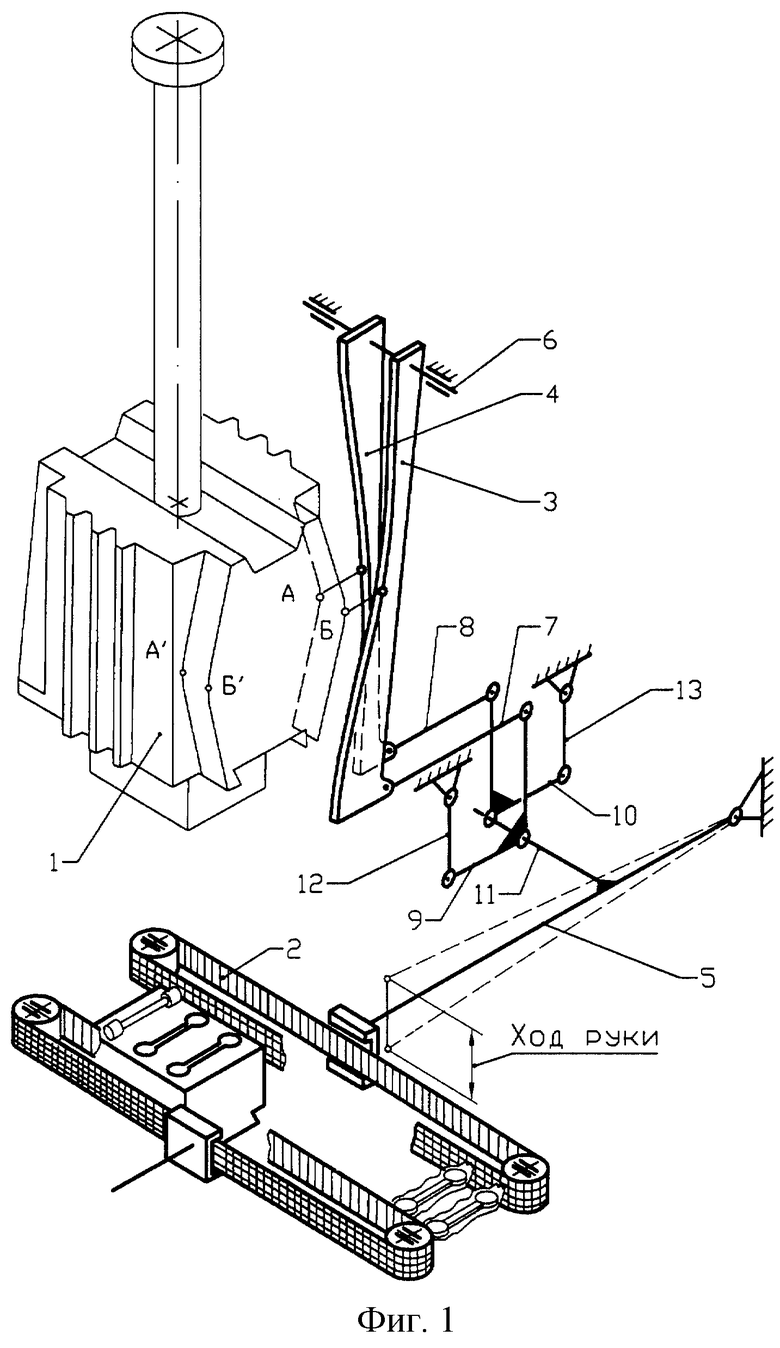
| МАНИПУЛЯТОР К ШТАМПОВОЧНОМУ МОЛОТУ | 1990 |
|
RU2036040C1 |
| SU 923693, 30.04.1982 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ КОМБИНИРОВАННОЙ ТРУБЫ | 2001 |
|
RU2208735C2 |

