Изобретение относится к области обработки металлов давлением, в частности к подающим и удаляющим устройствам и может быть использовано для пода и в штамп штучных листовых заготовок и удаления из штампа готовых деталей и отходов. По основному авт.св. № 774940 .известен манипулятор, содержащий корпус, смонтированный на нем вал механической р;уки с коромыслом, кулачково-рычажный механизм подъема и поворота вала от реверсивного привода, ловители на корпусе и пальцевый фиксатор на коромысле Недостатком известного манипуля тора являются большие динамические нагрузки, ограничивающие возможность повышения скорости при повороте руки. Целью изобретения является повы шение производительности манипулятора за счет обеспечения возможности снижения динамических нагрузок. Указанная цель достигается тем, что манипулятор снабжен двумя звеньями, одно из которых установлено на валу механической руки, а друго размещено на коромысле с возможностью взаимодействия с первым зве ном и подпружинено относительно ко пуса. При этом звено, размещенное на корпусе, может быть снабжено фрикционной накладкой, а его связь с к пусом выполнена в виде .установленн в них нескольких пар втулок и вин тов, связанных с соответствующими им втулками посредством правого и левого резьбовых соединений, при этом, одна из втулок каждого регулировочного винта установлена в соединяемом элементе свободно, а другая - посредством индивидуально резьбового соединения. На фиг.1 изображена кинематичес кая схема манипулятора; на фиг.2 узел звеньев, продольный разрез н фиг.З - вариант узла звеньев, продольный разрез на фиг.4 - второй вариант выполнения узла звеньев. Манипулятор содержит корпус 1, смонтированный на нем-вал 2, жестк закрепленную на валу 2 механическу руку 3, установленный на механической руке 3 схват 4, кулачково-р чажный механизм 5 подъема и поворо вала 2, реверсивный привод б этого механизма 5, закрепленные на корпу се 1 ловители 7, смонтированный на валу 2 фиксатор 8 и узел 9 натяжения кинематической цепи манипулято ра. Вал 2 установлен на корпусе 1 на подшипниках 10, шарнирно соединен с кулачково-рычажным механизмо 5 при помощи коромысла 11, несущего на другом плече пальцевой фиксатор 8, и имеет звено 12 узла 9 натяжения. Кулачково-рычажный механизм 5 выполнен в виде кулачка 13, жестко закрепленного на выходном валу реверсивного привода б и имеющего две рабочие впадины 14 и 15, атакже двуплечего рычага 16, кривошипа 17, шатуна 18 с демпферным устройством 19. Двуплечий рычаг 16. шарнирно соединен с валом 2, а другим плечом с роликом 20, взаимодействующим с профилем кулачка 13. При этом рабочие впадины 14 и 15 обеспечивают поворот рычага 16 и вертикальное перемещение вала.2. Шатун 18 шарнирно соединен с коромыслом 11 вала 2, причем демпферное устройство 19 обеспечивает изменение длины шатуна 18 при повороте кулачка 13 на угол, превышающий 180°. Ловители 7 жестко закреплены на корпусе 1, имеют заходную фаску и предназначены для фиксации механической руки 3 и схвата 4 в крайних положениях, соответствующих повороту кривошипа 17 на 180°, за счет взаимодействия фиксатора 8 с лови телями 7. Причем контакт фиксатора g с ловителями 7 обеспечивается в фазах углов oil и -2 поворота кривошипа 17, т.е. ci 180°- +с1,где d-угол поворота реверсивного привода 6. Узел 9 натяжения кинематической цепи манипулятора выполнен в виде зве.на 12, жестко закрепленного на валу 2, звена 21 с фрикционнрй накладкой 22, пружин 23 .и регулировочных винтов 24, исключающих поворот и ограничивающих ход звена 21, обеспечивающих предварительное сжатие пружин . 23 и регулировку зазора сГ между звеном 12 и фрикционной накладкой 22. Взаимодействие звеньев 12и 21 через накладку 22 осуществляется только в фазе вертикального перемещения вала 2. Звено.12 узла 9 натяжения может быть выполнено в виде диска, сектора, двухстороннего кронштейна. При любой форме звена 12 надежная регулировка обеспечивается при трех регулировочных винтах 24 и трех пружинах 23. При форме звенеС 12 в виде диска достаточно двух пружин 23 и двух регулировочных винтов 24. Рабочие впадины 14 и 15 кулачка 13расположены относительно друг др5ПРа таким образом, что угол /3 между началами их рабочих профилей меньше 180°. Это обеспечивает наг чало поворота рычага 16 и вертикальное перемещение вала 2 до того, как рука 3 и схват 4 достигнут своего крайнего положения.
Силовое замьокание ролика 20 с профилем рабочих впадин 14 и 15 на всей рабочей длине, начиная с мо- . мента взаимодействия звена 12с накладкой 22, обеспечивают пружины 23, Работа манипулятора заклйчается в следующем.
При работе реверсивного привода 6 кулачок 13 и кривошип 17 поворачиваются, перемещая шатун 18, который взаимодействуя с коромыслом 11, поворачивает вал 2, разгоняя его до максимальной скорости и затормаживая его по законам реального двухкоромыслового механизма. На этапе разгона шатун 18 подвергается сжатию и сокращает свою длину за счет демпферного устройства 19. На этапе торможения шатун 18 подвергается растяжению и удлиняется за счет демпферного устройства 19.
При подходе руки 3 к одному из крайних, положений ролик 20 начинает взаимодействовать с профилем одной из впадин 14, 15.
Рычаг 16 поворачивается и вал 2 опускается вниз, взаимодействуя звеном 12 с фрикционной, накладкой 22 звена 21. За счет внешнеЛ) трения звеньев 12 и 21 между собой происходит натяжение (выборка зазоров) кинематической цепи кулачково-рычажного механизма 5, уменьшение усилия растяжения на шатуне 18 и сокращение длины его за счет демпферного устройства 19, а также рассеивание кинематической энергии, накопленной механической рукой 3.
При дальнейшем повороте кулачка 13 вал 2, опускаясь, звеном 12 сжимает пружины 23 и увеличивает силу взаимодействия звеньев 12 и 21 затормаживая тем самым себя, механическую руку З.и схват 4. Вследствие этого происходит согласование выходного звена (коромысла 11) с входным звеном (кривошипом 17), а шатун 18 подвергается сжатию, т.е. ведет коромысло 11 вала 2 до момента остановки этого вала 2.
По достижению крайнего положения руки 3 фиксатор 8 начинает взаимодействовать с ловителем 7, а так как к этому моменту механизм уже согласован, то скорость поворота вала 2, руки 3 практически равна нулю. Рука 3 фиксируется в крайнем положении ловителем 7 и фиксатором 8, а кулачок 13 продолжает поворачиватся на угол d. или (i-2 При этом шатун 18 изменяет свою длину за счет демпферного устройства 19, поскольку коромысло 11 неподвижно, а вал 2 рука 3 и схват 4 опускаются вертикально до расчётной отметки.
Затем реверсивный привод б меняет направление своего движения и поворота кулачка 13. Ролик 20, взаимодействуя с профилем, одной из впадин 14, 15, рычагом 16 перемещает вал 2 вверх.
В определе нный момент фиксатор 8 выходит из контакта с ловителем 7, шатун 18 достигает номинальной длины за счет изменения длины демпферного устройства 19. Поскольку звенья 12 и 21 продолжают взаимодействовать, происходит натяжение (выборка зазоров) кинематической цепи кулачково-рычажного механизма 5. Страгив ние происходит при определенном усилии взаимодействия звеньев 12 и 21, а затем эти звенья выходят из контакта и шатун 18 разгоняет вал 2 до максимальной скорости. Далее цикл работы повторяется.
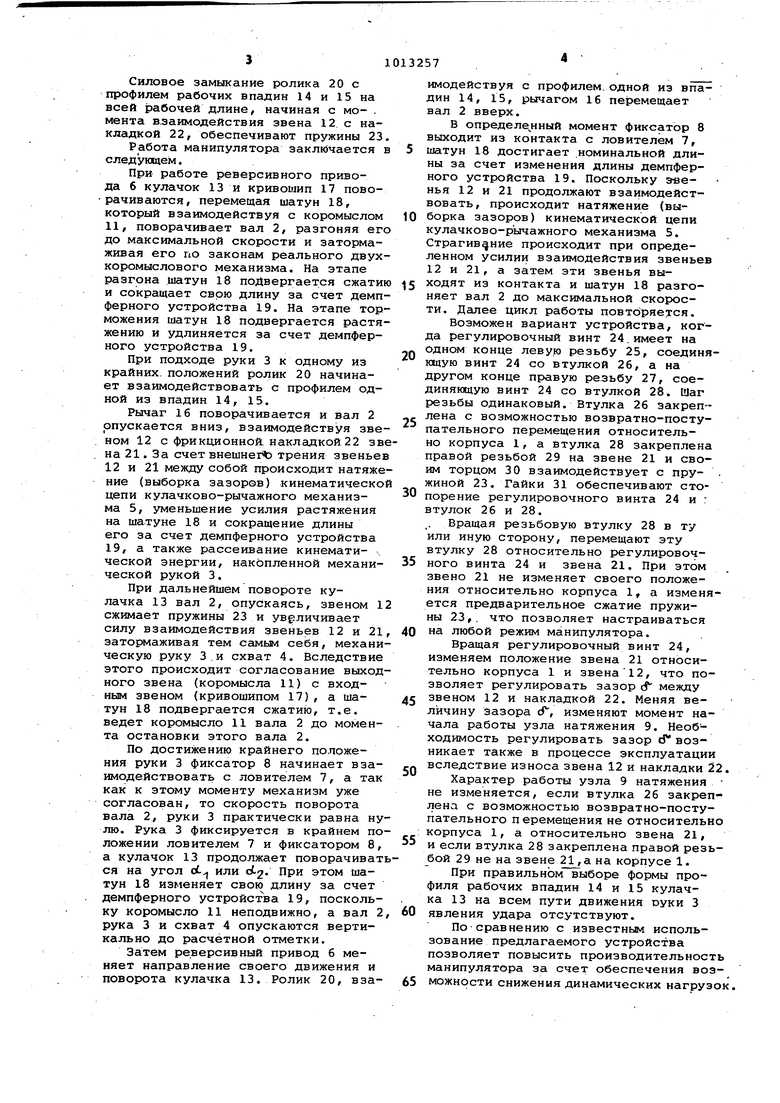
Возможен вариант устройства, когда регулировочный винт 24.имеет на одном конце левую резьбу 25, соединя0ющую винт 24 со втулкой 26, а на другом конце правую резьбу 27, соединяющую винт 24 со втулкой 28. Шаг резьбы одинаковый. Втулка 26 закреп- лена с возможностью возвратно-поступательного перемещения относительно корпуса 1, а втулка 28 закреплена правой резьбой 29 на звене 21 и своим торцом 30 взаимодействует с пружиной 23. Гайки 31 обеспечивают сто0 порение регулировочного винта 24 и : втулок 26 и 28.
,. Вращая резьбовую втулку 28 в ту или иную сторону, перемещают эту втулку 28 относительно регулировочного винта 24 и звена 21. При этом звено 21 не изменяет своего положения относительно корпуса 1, а Изменяется предварительное сжатие пружины 23,. что позволяет настраиваться 0 на любой режим манипулятора.
Вращая регулировочный винт 24, изменяем положение звена 21 относительно корпуса 1 и звена12, что позволяет регулировать зазор (f между 5 звеном 12 и накладкой 22. Меняя величину зазора (f, изменяют момент начала работы узла натяжения 9. Необходимость регулировать зазор cf возникает также в процессе эксплуатации вследствие износа звена 12 и накладки 22.
50 Характер работы узла 9 натяжения не изменяется, если втулка 26 закреплена с возможностью возвратно-поступательного п еремещения не относительно : корпуса 1, а относительно звена 21, 55 и если втулка 28 закреплена правой резьбой 29 не на звене 21 ,а на корпусе 1.
При правильном выборе формы профиля рабочих впадин 14 и 15 кулачка 13 на всем пути движения оуки 3 60 явления удара отсутствуют.
По-сравнению с известным использование предлагаемого устройства позволяет повысить производительность манипулятора за счет обеспечения возможности снижения динамических нагрузок.
21
фиг 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1013258A2 |
| Манипулятор | 1978 |
|
SU774940A1 |
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |
| Манипулятор | 1978 |
|
SU751618A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| Манипулятор | 1978 |
|
SU727422A1 |
| Манипулятор | 1988 |
|
SU1569223A1 |
| Манипулятор | 1985 |
|
SU1281400A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ КОЛЕБАНИЙ ВЫХОДНОГО ЗВЕНА КУЛАЧКОВО-ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 1993 |
|
RU2066858C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |


2
Vу///.
Ф
/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1978 |
|
SU774940A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
