Изобретение относится к авиационному приборостроению и может быть использовано в автоматических системах управления рулением, взлетом и посадкой самолетов различных классов на этапе выкатывания на магистральную взлетно-посадочную полосу (ВПП) и на этапах взлета и посадки в сложных метеоусловиях.
Наиболее близкой по технической сущности и достигаемому результату к изобретению является система руления, взлета и посадки самолетов, содержащая наземное оборудование, включающее множество равномерно размещенных вдоль каждой стороны ВПП посадочных сигнальных огней с длиной волны излучения в видимом диапазоне волн, и установленное на борту самолета бортовое оборудование, включающее телевизионную камеру и устройство отображения информации, принятая за прототип.
Недостатком данной системы является недостаточная безопасность разбега при взлете и посадке самолета из-за отсутствия видимости огней в сложных метеоусловиях и из-за отсутствия информации о пространственном положении и о количественных параметрах движения самолета.
Технический результат изобретения заключается в повышении точности и эксплуатационной надежности телевизионной системы за счет обеспечения синхронизма между кадровой частотой камеры бортового оборудования и частотой проблесков генератора наземного оборудования системы без использования линии радиосвязи и увеличения точности формирования для пилота коридоров руления, взлетов и посадки.
Технический результат достигается тем, что в телевизионную систему для руления, взлета и посадки самолетов в сложных метеоусловиях, содержащую наземное оборудование, включающее множество равномерно размещенных вдоль каждой стороны ВПП посадочных сигнальных огней с длиной волны излучения в видимом диапазоне волн и установленное на борту самолета бортовое оборудование, включающее телевизионную камеру и устройство отображения информации, в наземное оборудование введены несколько пар импульсных проблесковых маяков с длиной волны излучения в инфракрасном диапазоне волн с высоковольтными источниками питания и трансформаторами, расположенных между посадочными сигнальными огнями по обе стороны ВПП, а также генератор частоты проблесков, электронные селекторы и выпрямители, в бортовое оборудование самолета дополнительно введены блок селекции, блок вычислений параметров движения самолета, хронизатор, автоматический привод объектива телевизионной камеры и блок управления приводом, а также датчик угол-код и пульт управления, при этом первичные обмотки трансформаторов высоковольтных источников питания проблесковых маяков последовательно включены в цепь фидера питания посадочных огней, а вторичные обмотки трансформаторов соединены с высоковольтными выпрямителями через электронные селекторы, входы которых соединены с выходами генератора частоты проблесков, первый выход телевизионной камеры подключен к первому входу блока селекции, а второй и третий выходы телевизионной камеры подсоединены к входу хронизатора и первому входу устройства отображения соответственно, первый вход блока селекции подсоединен к синхрогенератору телевизионной камеры, а второй его выход подсоединен к первому входу блока вычислений параметров движения самолета, первый, второй, третий выходы хронизатора подсоединены соответственно к второму входу блока селекции, второму входу блока вычислений параметров движения самолета и второму входу блока отображения информации, третий вход блока вычислений параметров движения самолета подсоединен к первому выходу датчика угол-код, первый выход блока вычислений параметров движения самолета подсоединен к третьему входу блока отображения информации, а второй его выход подключен к первому входу блока управления приводом объектива телевизионной камеры, второй вход которого подключен к первому выходу пульта управления, а его третий вход - к второму выходу датчика угол-код, выход блока управления приводом подсоединен к приводу объектива телевизионной камеры, а второй выход пульта управления подключен к четвертому входу блока вычисления параметров движения самолета.
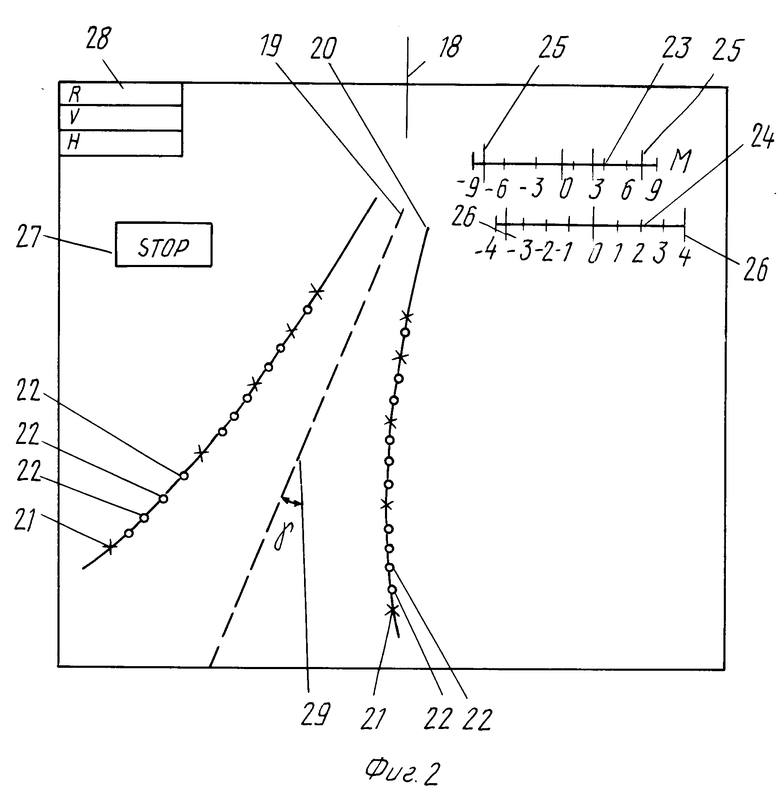
На фиг.1а, б изображена функциональная схема наземного оборудования телевизионной системы; на фиг.2 - телевизионный дисплейный кадр линии коридора руления, взлета и посадки на ВПП (на устройстве отображения).
Телевизионная система содержит наземное и бортовое оборудование, установленное на борту самолета. Наземное оборудование включает посадочные сигнальные огни 1 с длиной волны излучения в видимом диапазоне волн, установленные вдоль сторон ВПП, цепь 2 для питания посадочных огней 1, проблесковые маяки 3 с длиной волны излучения в инфракрасном диапазоне волн, расположенные попарно вдоль сторон ВПП между сигнальными огнями 1. Для обеспечения работы каждого проблескового маяка рядом с ним на ВПП расположен источник высокого напряжения, состоящий из высоковольтного трансформатора с первичной обмоткой 4 и вторичной обмоткой 5, а также генератор частоты проблесков 6, селектор синхросигналов 7 и высоковольтный выпрямитель 8. Первичная обмотка трансформатора 4 включена последовательно в цепь фидера, питающего существующие посадочные огни (расположенные на ВПП на расстоянии 50-60 м один от другого), а вторичная 5 подключена к выпрямителю через контакты электронного селектора 7.
В наземной части телевизионной системы первичные обмотки трансформаторов высоковольтных источников 4 последовательно включены в цепь фидера питания существующих посадочных огней 2, вторичные обмотки 5 которых подключены к высоковольтному выпрямителю 8 через контакты электронных селекторов 7, на входы которых подключены выходы генератора частота проблесков 6, выход высоковольтных выпрямителей 8 подключен к контактам источников излучения проблесковых маяков 3. Бортовое оборудование включает объектив 9 с приводом с датчиком типа угол-код 10 и схемой управления 11, телевизионную камеру 12 и хронизатор 13, блок селекции 14, вычислитель параметров движения самолета 15, включающий схемы вычисления растровых координат, интерполяции, вычисления ошибок отклонения курса самолета от осевой линии ВПП и вычисления дальности, выходы которых подключены к устройству отображения информации 16 и пульт управления 17. В бортовой части системы один из выходов телекамеры 12 подключен к входу блока селекции 14, а два других выхода подключены к входам хронизатора 13 и устройства отображения 16. Один из выходов блока селекции 14 подключен на установочный вход синхрогенератора телевизионной камеры 12, а другой выход блока селекции 14 - к входу вычислителя параметров движения самолета 15, один из выходов которого подключен к входу схемы управления приводом 11, другие выходы вычислителя параметров движения самолета 15 подключены к соответствующим входам устройства отображения информации 16. Один из входов вычислителя параметров движения самолета 15 подключен к выходу датчика типа угол-код 10, другой выход которого подключен к второму входу схемы управления приводом 11, а выход этой схемы подключен к обмотке привода объектива 9. Выходы хронизатора 13 подключены к соответствующим входам блока селекции 14, вычислителя параметров движения самолета 15 и устройства отображения информации 16. На вход пульта управления 17 подключены контакты от первичной бортсети питания самолета, один из выходов пульта управления 17 подключен к одному из входов вычислителя параметров движения самолета 15, а другие выходы пульта управления 17 подключены (по питанию) ко всем устройствам бортовой телевизионной системы к входам телевизионной камеры 12, блока селекции 14, хронизатора 13, вычислителя параметров движения самолета 15, схемы управления приводом 11, устройства отображения информации 16. Один из выходов вычислителя параметров движения самолета 15 подается на вход внешней системы автоматической коррекции курса самолета. В этом режиме двоичные коды, пропорциональные отклонениям курса самолета (вектора скорости) от осевой линии ВПП, подаются на внешнюю систему самолета (типа автопилота) и могут быть использованы для автоматической коррекции курса, а в целом для повышения безопасности полета телевизионная камера 12 введена для преобразования светопотоков от проблесковых маяков 3 на входном зрачке в электрические сигналы с передачей их на схемы обработки и вычислений. Назначение привода объектива 9, датчика угол-код 10 и схемы управления приводом 11 заключается в изменении фокусного расстояния объектива в функции дальности до соответствующей пары проблесковых маяков 3 (до ближайшей при посадке и дальней при взлете самолета). Назначение блока селекции 14 заключается в селекции сигналов только от указанных проблесковых маяков 3 и подавлении мешающего фона. Назначение вычислителя параметров самолета 15 заключается в измерении растровых координат сигналов от проблесковых маяков, вычислении отклонений курса самолета от осевой линии ВПП, вычислении дальности, скорости и высоты самолета относительно ВПП, формировании видеосигнала, соответствующего обозначению коридоров руления, взлета и посадки, формировании видеосигнала со знаковой индикацией значений дальности, скорости и высоты, а также в виде шкал отклонений курса самолета, формировании знака, предупреждающего пилота о недопустимых отклонениях. Вычислитель параметров самолета 15 формирует также сигналы для автоматической коррекции курса для соответствующей смежной системы самолета. Введение хронизатора 13 обеспечивает повышение точности синхронной работы схем блока селекции 14, вычислителя параметров движения самолета 15 и устройства отображения информации 16 путем формирования единой сетки опорных тактовых частот и синхросигналов. Назначение устройства отображения информации 16 заключается в визуализации для пилота коридоров руления, взлета и посадки, а также параметров положения самолета относительно рулевых дорожек и ВПП.
Система работает следующим образом.
На этапе руления телевизионная система включается при метеорологической дальности видимости RМДВ соответствующей посадочной категории III-RМДВ=200 м путем включения генератора частоты проблесков 6 и бортовой части телевизионной системы 12. Учитывая, что длина рулежных дорожек по прямой как правило не превышает нескольких сот метров, проблесковые маяки 3 располагаются вдоль рулежных дорожек при расстоянии между парами 50-100 м и работают при пониженной мощности, что может быть достигнуто снижением первичного напряжения в питающем фидере 2. При движении самолета по рулежной дорожке телевизионная система 12 формирует для пилота коридор руления и в случае отклонения курса от осевой линии рулежной дорожки автоматически возникает сигнал предупреждения.
Измерение дальности и скорости на этапе руления не имеет смысла - пилота при отсутствии визуального контакта интересует лишь, правильно ли двигается самолет при рулении (маневрировании) до взлета и после посадки с тем, чтобы исключить выезд на грунт.
На этапе взлета телевизионная система 12 включается в условиях, аналогичных предыдущему случаю, однако проблесковые маяки 3 работают на полную мощность. Телевизионная камера 12 принимает и преобразует в видеосигнал весь сюжет в ее поле зрения, из которого в блоке селекции 14 выделяются только сигналы от проблесковых маяков 3, при этом один из этих сигналов подается на установочный вход синхрогенератора телевизионной камеры 12, что обеспечивает визуализацию ВПП при проецировании проблесковых маяков 3 только на прямой ходу кадровой развертки. Хронирование синхрогенератора телевизионной камеры 12 сигналами проблесковых маяков 3 с одной стороны обеспечивает необходимую для работы точность совпадения частот генератора частоты проблесков 6 с частотой развертки телевизионной камеры 12, а с другой исключает необходимость дополнительной линии радиосвязи для хронирования генератора частоты проблесков 6 сигналами телевизионной камеры 12. На этапе взлета величина фокусного расстояния F объектива 9 выбирается минимальной и остается постоянной (нажатием кнопки "взлет" на пульте управления 17 обесточивается схема управления приводом 11, при этом значение F=Fmin). Аналогичный видеосигнал телевизионной камеры 12 подается также на хронизатор 13, который этим сигналом переводится в ведомый режим и формирует сетку тактовых частот и синхросигналов, необходимых для хронирования блока селекции 14, вычислителя параметров движения самолета 15 и устройства отображения информации 16. На выходе блока селекции 14 образуется цифровой поток, соответствующий сигналам от проблесковых маяков 3, который подается на вычислитель параметров движения самолета 15. Последний измеряет растровые координаты всех наблюдаемых сигналов и по измеренным значениям вычисляет растровые координаты точек между сигналами от маяков и формирует соответствующие им видеоимпульсы на интервале примерно в 1 с, сочетание этих видеоимпульсов, временное положение которых обновляется после каждой вспышки проблесковых маяков 3, представляет собой коридор взлета, который на цветном дисплее пульта управления 17 может быть окрашен, например, в зеленый цвет. Эту функцию выполняет схема интерполятора - отклонение курса самолета от осевой линии ВПП, при этом численные значения отклонений визуализируются с помощью индексов на шкалах углового и параллельного отклонений. Числовые значения отклонений курса, соответствующие им шкалы, индексы, а также значения дальности до наиболее удаленной пары светомаяков и скорости самолета составляют суммарный дисплейный кадр в устройстве отображения информации 16, который смешивается с аналоговым сигналом телевизионной камеры 12. Поэтому пилот самолета помимо дисплейной информации может наблюдать и сюжет в пределах аэропорта, если туман не скроет отдельные фрагменты. В то же время пилот может по желанию исключить из необходимого сюжета аналоговую составляющую суммарного видеосигнала путем нажатия соответствующей кнопки на устройстве отображения информации 16 и сосредоточить все внимание только на отображении коридоров взлета и посадки и требуемой цифробуквенной информации (см. фиг.2).
В устройстве отображения информации 16 автоматически формируется также сигнал предупреждения, если величины отклонений превышают допустимые значения и если дальность до торца ВПП недостаточна для успешного завершения взлета.
На этапе посадки взаимодействие устройств наземной и бортовой аппаратуры такое же, как и на этапе взлета. Однако на этом этапе действует механизм изменения фокусного расстояния F объектива 9, управление приводом которого осуществляется следующим образом. Нажатием кнопки "посадка" на пульте управления 17 включается сигнал на блок управления приводом 11. Начиная с некоторого расстояния до торцевых светомаяков при заходе на посадку, например R≈1,5 км, пересчитанные в требуемые значения фокусного расстояния F величины наклонной дальности подаются на схему управления приводом 11, на другой вход подаются значения фокусного расстояния F, снимаемые с датчика угол-код 10, в результате в схеме управления приводом 11 образуется сигнал рассогласования, который будучи преобразованный в управляющее напряжение, подается в обмотку привода объектива 9 для отработки рассогласования. На этапе посадки схемой измерителя дальности вычисляются также скорость и высота самолета. Помимо указанного на один из выходов вычислителя параметров движения самолета 15 подключены численные значения в двоичном коде отклонения курса самолета от осевой линии ВПП, которые на этапах взлета и посадки могут использоваться для автоматической коррекции курса соответствующими системами самолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ ПОСАДКИ ВЕРТОЛЕТОВ В СЛОЖНЫХ МЕТЕОУСЛОВИЯХ | 1992 |
|
RU2019471C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ РАЗЛИЧНЫХ КЛАССОВ (ВАРИАНТЫ) | 1999 |
|
RU2182313C2 |
| СИСТЕМА АВИАДИСПЕТЧЕРСКОГО КОНТРОЛЯ ЗА ВОЗДУШНЫМ ДВИЖЕНИЕМ В БЛИЖНЕЙ ЗОНЕ АЭРОПОРТА | 2002 |
|
RU2239846C2 |
| КОМПЛЕКСНАЯ ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ ПОИСКА ПОТЕРПЕВШИХ БЕДСТВИЕ ЛЮДЕЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2087386C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| КОМПЛЕКС СРЕДСТВ АВТОНОМНОЙ ПОСАДКИ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА | 2023 |
|
RU2813215C1 |
| СИСТЕМА ОТОБРАЖЕНИЯ ПИЛОТАЖНОЙ ИНФОРМАЦИИ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2046059C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОСАДКОЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2518434C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |

Использование: в автоматических системах управления рулением, взлета и посадки самолетов различных классов на магистральную взлетно - посадочную полосу (ВПП) и на этапах взлета и посадки в сложных метеоусловиях. Сущность изобретения: телевизионная система содержит наземное оборудование и установленное на борту самолета бортовое оборудование. Наземное оборудование включает посадочные сигнальные огни с длиной волны излучения в видимом диапазоне волн, установленное вдоль сторон ВПП, генератор частоты проблесков, выход которого соединен с входами проблесковых маяков, а также высоковольтные источники питания пар проблесковых маяков, включающие трансформаторы с обмотками и высоковольтные выпрямители. Бортовое оборудование содержит телевизионную камеру с объективом и синхрогенератором, устройство отображения информации, блок селекции, вход которого соединен с выходом телевизионной камеры и блок вычисления параметров движения самолета, включающий схемы вычисления растровых координат, интерполяции, вычисления ошибок отклонения курса самолета от осевой линии ВПП и вычисления дальности, выходы которых подключены к устройству отображения информации. Бортовое оборудование также содержит хронизатор, вход которого соединен с одним из выходов телевизионной камеры, а его выходы - соответственно с одним из входов блока селекции, входами блока вычисления параметров движения самолета и устройства отображения информации, автоматический привод объектива телевизионной камеры и схему управления приводом объектива, расположенные в оптической системе телевизионной камеры, а также пульт управления, один из выходов которого соединен со схемой измерения дальности, а другой - со схемой управления приводом объектива, при этом один из выходов блока селекции соединен с входом синхронизатора телевизионной камеры, а на валу привода объектива установлен датчик типа угол - код, один из выходов которого соединен с одним из входов схемы управления привода объектива, а другой - со схемой измерения дальности, один из выходов которой соединен с входом схемы управления приводом, выход которой подключен к приводу объектива. 2 ил.
ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ РУЛЕНИЯ, ВЗЛЕТА И ПОСАДКИ САМОЛЕТОВ В СЛОЖНЫХ МЕТЕОУСЛОВИЯХ, содержащая наземное оборудование, включающее множество равномерно размещенных вдоль каждой стороны взлетно-посадочной полосы посадочных сигнальных огней с длиной волны излучения в видимом диапазоне волн, и установленное на борту самолета бортовое оборудование, включающее телевизионную камеру и устройство отображения информации, отличающаяся тем, что в наземное оборудование введены несколько пар импульсных проблесковых маяков с длиной волны излучения в инфракрасном диапазоне волн с высоковольтными источниками питания и трансформаторами, расположенных между посадочными сигнальными огнями по обе стороны взлетно-посадочной полосы, а также генератор частоты проблесков, электронные селекторы и выпрямители, в бортовое оборудование самолета дополнительно введены блок селекции, блок вычисления параметров движения самолета, хронизатор, автоматический привод объектива телевизионной камеры и блок управления приводом, а также датчик угол-код и пульт управления, при этом первичные обмотки трансформаторов высоковольтных источников питания проблесков маяков последовательно включены в цепь фидера питания посадочных огней, а вторичные обмотки трансформаторов соединены с высоковольтными выпрямителями через электронные селекторы, входы которых соединены с выходами генератора частоты проблесков, первый выход телевизионной камеры подключен к первому входу блока селекции, а второй и третий выходы телевизионной камеры подсоединены к входу хронизатора и к первому входу устройства отображения соответственно, первый выход блока селекции подсоединен к синхрогенератору телевизионной камеры, а второй его выход подсоединен к первому входу блока вычислений параметров движения самолета, первый, второй, третий выходы хронизатора подсоединены соответственно к второму входу блока селекции, второму входу блока вычислений параметров движения самолета, и второму входу блока отображения информации, третий вход блока вычислений параметров движения самолета подсоединен к первому выходу датчика угол-код, первый выход блока вычислений параметров движения самолета соединен с третьим входом блока отображения информации, а второй его выход подключен к первому входу блока управления приводом объектива телевизионной камеры, второй вход которого подключен к первому выходу пульта управления, а его третий вход подключен к второму выходу датчика угол-код, выход блока управления приводом подключен к приводу объектива телевизионной камеры, а второй выход пульта управления подключен к четвертому входу блока вычислений параметров движения самолета.
| Патент США N 4640343, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
