Изобретение относится к авиационному приборостроению и предназначено для оборудования вертолетов с целью обеспечения возможности посадки аппарата на любую заранее оборудованную посадочную площадку в сложных метеорологических условиях за счет обеспечения пилота информацией, адекватной обстановке. Кроме того, изобретение может быть использовано при создании автоматических систем посадки вертолетных аппаратов.
Известно индикаторное устройство для вертолетов, которое представляет собой замкнутую телевизионную (ТВ) систему, в состав которой входят ТВ-камера, располагаемая в нижней части фюзеляжа вертолета, оптическая ось которой параллельна линии, проходящей через ось ротора, механизм стопорения и стабилизации камеры, индикаторное устройство для отображения видеоинформации от сюжетов в поле зрения камеры с наложением сигналов светящихся подвижных маркеров. Указанная ТВ-система позволяет пилоту удерживать вертолет над участком поверхности земли или моря с желаемой точностью над участком, с которого осуществляется подъем грузов на борт. При этом специальное электронное устройство формирует сигналы светящихся подвижных маркеров, положение которых в плоскости изображения от камеры (на мониторе) является функцией отклонения вертолета от оптимального положения при подъеме грузов на этапе зависания, и задача пилота заключается в совмещении указанных подвижных маркеров с неподвижными. Других задач телевизионная система не решает и, следовательно, не обеспечивает безопасность при посадке вертолета на площадки малых размеров в сложных метеоусловиях.
Задачей изобретения является повышение безопасности посадки аппарата в сложных метеоусловиях.
Это достигается тем, что в телевизионную систему для посадки от вертолетов в сложных метеоусловиях, содержащую телевизионную камеру, установленную в нижней части фюзеляжа вертолета, и устройство для отображения информации, введены три светомаяка, установленные на посадочной площадке и размещенные в вершинах равностороннего треугольника по периметру посадочной площадки, и подключенный к ним генератор мельканий, расположенные на борту вертолета, вторая телевизионная камера, оптическая ось которой направлена вдоль продольной оси вертолета, последовательно соединенные коммутатор, взаимосвязанный с двумя телевизионными камерами, блок селекции, блок координат и блок определения момента зависания, первый выход которого соединен с третьим входом коммутатора, а второй выход - с первым входом устройства для отображения информации, второй вход которого соединен с выходом блока селекции, хронизатор, вход которого объединен с третьим входом устройства для отображения информации и подключен к второму выходу коммутатора, блок формирования телевизионного индекса, блок дальности и блок измерения высоты и скорости снижения, входы которых объединены и подключены к второму выходу блока координат, а выходы соединены соответственно с четвертым, пятым и шестым входами устройства для отображения информации, а также пульт пилота, выход которого соединен с вторыми входами блока измерения высоты и скорости снижения и блока дальности, причем второй вход блока формирования телевизионного индекса соединен c третьим выходом блока определения момента зависания, а выходы хронизатора подключены к тактовым и синхронизирующим входам блоков селекции, определения момента зависания, координат, формирования телевизионного индекса, дальности, измерения высоты и скорости снижения.
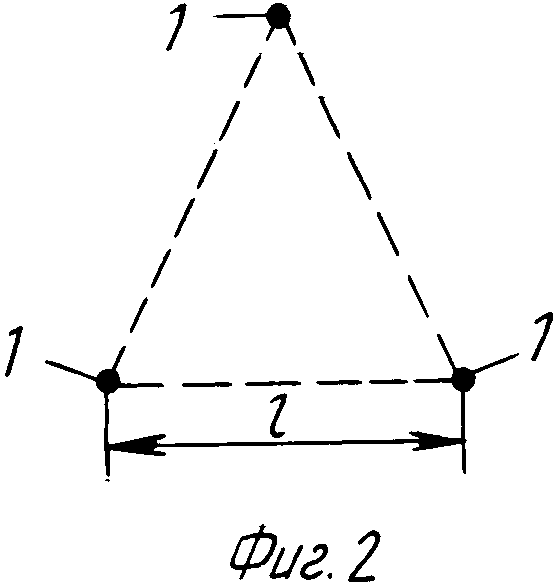
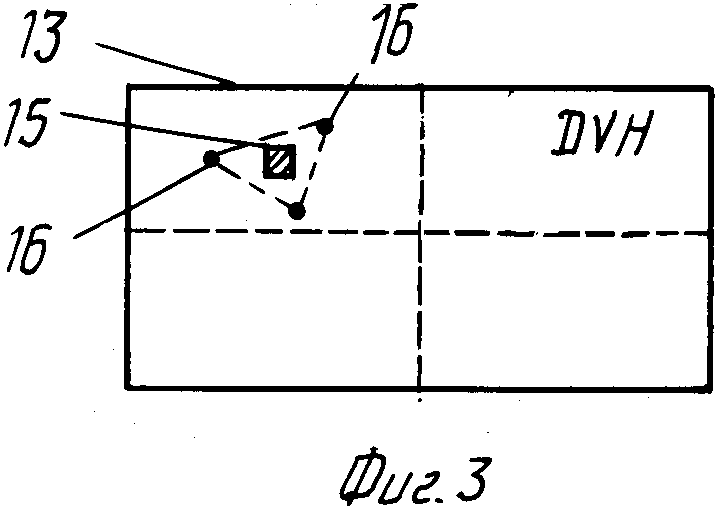
На фиг.1 приведена функциональная схема телевизионной системы; на фиг.2 - схема геометрического расположения светомаяков для отображения информации; на фиг.3 - иллюстрация сигналов от проблесковых маяков.
Телевизионная система содержит светомаяки 1, генератор 2 мельканий, телевизионные камеры 3,4, коммутатор 5, блок 6 селекции, блок 7 определения момента зависания, блок 8 координат, блок 9 формирования ТВ-индекса, блока 10 дальности, блок 11 измерения высоты и скорости снижения, пульт 12 пилота, устройство 13 для отображения информации, хронизатор 14. На фиг.3 обозначены ТВ-индекс 15 и отображения 16 проблесковых маяков на устройстве для отображения информации.
Телевизионная система содержит наземное оборудование, а также оборудование, устанавливаемое на борту вертолета.
На посадочной площадке (аэродром, палубы авианосца, ледокола, буровые вышки морского базирования и др.) устанавливают (фиг.1) светомаяки 1, подключаемые к генератору 2 мельканий, который обеспечивает одновременность вспышек маяков с частотой повторения около 1 Гц. Маяки устанавливают в вершинах равностороннего треугольника, длина стороны которого 5-10 м. Маяки 1 работают в одном из ИК-диапазонов светового излучения и обеспечивают светопотоки в сферических углах, достаточных для обнаружения их с борта вертолета как на этапе подлета, так и снижения.
На борту вертолета установлены с помощью амортизаторов виброгашения для телевизионных ПЗC камеры. Оптическая ось телевизионной камеры 3 совпадает с продольной осью вертолета, оптическая ось телевизионной камеры 4 расположена перпендикулярно оптической оси телевизионной камеры 3. Выходы телевизионных камер 3 и 4 включены на первый и второй входы коммутатора 5, предназначенного для переключения камер в режиме подлета и снижения. Первый выход коммутатора 5 подключен к входу блока 6 селекции, предназначенного для формирования видеосигналов только от светомаяков 1 и подавления фона. Первый выход блока 6 включен на вход блока 8 координат, назначением которого является вычисление растровых координат сигналов светомаяков 1. Выход блока 8 включен параллельно на первые входы блока 9 формирования ТВ-индекса, блока 10 дальности и блока 11 измерения высоты и скорости снижения. Блок 10 предназначен для вычисления расстояния до светомаяков на этапе подлета. В блоке 9 ТВ-индекса вычисляются координаты центра тяжести треугольника, образованного видеосигналами светомаяков 1, и организуется изображение ТВ-индекса. Блок 11 измерения высоты и скорости снижения вычисляет эти параметры на этапе снижения. На третий вход коммутатора 5 включен первый выход блока 7. Вход этого блока, предназначенного для определения момента зависания вертолета над посадочной площадкой, оборудованной светомаяками 1, соединен с вторым выходом блока 8. Пульт 12 пилота одновременно включен выходом на вторые входы блока 10 дальности и блока 11 измерения высоты и скорости снижения. С пульта 12 в блоки 10 и 11 вводятся параметры, соответствующие конкретной посадочной площадке, а также осуществляются включение и выключение телевизионной системы.
Устройство 13 для отображения информации предназначено для визуализации суммарной информации, включая телевизионные сигналы камер 3 и 4, ТВ-сигналы от светомаяков 1, цифровую информацию и сигнал ТВ-индекса. С входами устройства 13 соединены третий вход блока 7, выходы блоков 9, 10 и 11, второй выход блока 6, второй выход коммутатора 5. Этот же выход коммутатора 5 одновременно подключен на вход хронизатора 14, вырабатывающего импульсы тактовой частоты и синхроимпульсы для каналов обработки и вычислений телевизионной системы. Сигналы хронизатора 14 подаются на блоки 6-11.
Система работает следующим образом.
При подлете к посадочной площадке включена телевизионная камера 3, чувствительная к инфракрасному излучению. Она принимает и преобразует в видеоимпульсы оптические сигналы от светомаяков 1. С выхода телевизионной камеры 3 эти видеосигналы передаются в блок 6, где подавляются помехи от фона и формируются для дальнейшей обработки сигналы только от светомаяков. При этом изображение обстановки, воспринимаемое камерой 3 с выхода блока 6, передается на устройство 13. По другому выходу блока 6 сигналы поступают на вход блока 8, который определяет приборные (растровые) координаты сигналов от проблесковых огней относительно оптической оси телевизионной камеры 3. Информация о полученных приборных координатах по одному из выходов блока 8 подается на вход блока 7, а по другому - параллельно на входы блоков 9,10 и 11.
В блоке 10 определяется дальность до проблесковых маяков на этапе подлета, геометрический треугольник которых воспринимается в этом режиме приблизительно линией. Дальность (Д) до светомаяков 1 определяется по формуле
Д =  , м где l - длина стороны треугольника проблесковых маяков, м;
, м где l - длина стороны треугольника проблесковых маяков, м;
F - фокусное расстояние объектива телевизионной камеры 3, мм;
δl - максимальное расстояние между видеосигналами от проблесковых маяков, мм (в плоскости ТВ-изображения).
Информация о дальности выводится с выхода блока 10 на устройство 13. По мере приближения к посадочной полосе все три сигнала от проблесковых маяков за счет измерения курса вертолета переводятся ближе к центру растра и располагаются в виде треугольника (фиг.3). Блок 7 определяет момент зависания над посадочной площадкой. По одному из его выходов, включенному на вход блока 9, подается сигнал, разрешающий формирование ТВ-индекса. По другому выходу блока 7, соединенному с входом устройства 13, передается сигнал, формирующий зрительное или звуковое оповещение пилота о приближении зависания. С выхода блока 7 в коммутатор 5 подается команда на отключение телевизионной камеры 3 и включение камеры 4, имеющей спектральную чувствительность, аналогичную камере 3. Блок 11 измерения высоты и скорости снижения определяет указанные параметры по формулам
H =  , V =
, V =  , где Н - высота, м;
, где Н - высота, м;
l - длина стороны треугольника расположения светомаяков 1, м;
δl - максимальное расстояние между видеосигналами проблесковых маяков, мм;
F1 - фокусное расстояние камеры 4, мм;
V - скорость снижения, м/с;
Δ t - интервал времени между замерами значений Н1 и Н2, с.
Значение l для конкретной посадочной площадки вводится пилотом в пульт 12 в блок 11. Одновременно это значение вводится и в блок 10. Параметры V и Н с выхода блока 11 передаются на устройство 10.
Блок 9 вычисляет координаты центра тяжести треугольника, образованного видеосигналами 16 проблесковых маяков 1, и формирует ТВ-индекс 15 (фиг.3), положение которого соответствует центру тяжести треугольника. Эта информация с выхода блока 9 передается на устройство 13 отображения информации. Пилот маневрами вертолета совмещает ТВ-индекс 15 с центром растра и выполняет посадку аппарата, получая всю информацию об эволюциях аппарата с устройства 13.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ РУЛЕНИЯ, ВЗЛЕТА И ПОСАДКИ САМОЛЕТОВ В СЛОЖНЫХ МЕТЕОУСЛОВИЯХ | 1992 |
|
RU2019472C1 |
| КОМПЛЕКСНАЯ ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ ПОИСКА ПОТЕРПЕВШИХ БЕДСТВИЕ ЛЮДЕЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2087386C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ РАЗЛИЧНЫХ КЛАССОВ (ВАРИАНТЫ) | 1999 |
|
RU2182313C2 |
| СПОСОБ ПОСАДКИ ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2516244C2 |
| СИСТЕМА АВИАДИСПЕТЧЕРСКОГО КОНТРОЛЯ ЗА ВОЗДУШНЫМ ДВИЖЕНИЕМ В БЛИЖНЕЙ ЗОНЕ АЭРОПОРТА | 2002 |
|
RU2239846C2 |
| Система посадки летательного аппарата на корабль с применением цифровых технологий | 2020 |
|
RU2734173C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2363009C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| Система обеспечения посадки вертолёта (варианты) | 2017 |
|
RU2674283C1 |
Изобретение относится к авиационному приборостроению и предназначено для оборудования вертолетов с целью обеспечения возможности посадки аппарата на аэродром или иную посадочную площадку ограниченных размеров в сложных метеоусловиях за счет обеспечения пилота информацией, адекватной обстановке. Кроме того, изобретение может быть использовано при создании автоматических систем посадки вертолетных аппаратов. Сущность изобретения: телевизионная (ТВ) система содержит светомаяки 1 и генератор 2 мельканий, расположенные на посадочной площадке. На борту аппарата установлены ТВ-камеры 3 и 4, подключаемые через коммутатор 5 к блоку 6 селекции. В систему входят также блок 7 осуществления момента зависания, блок 8 координат, блок 9 формирования ТВ-индекса, блок 10 дальности, блок 11 измерения высоты и скорости снижения, пульт 12 пилота и устройство 13 отображения информации. 3 ил.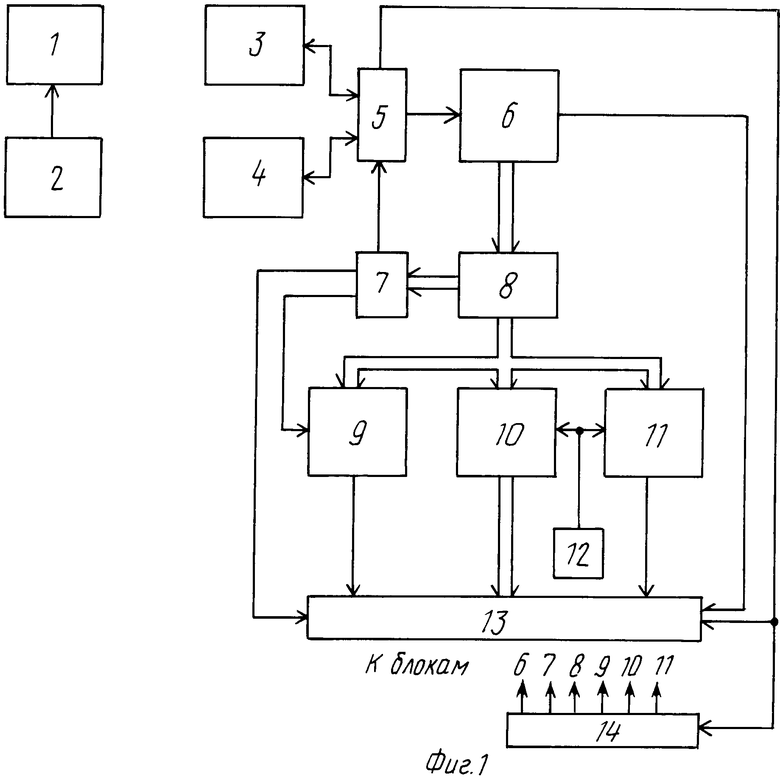
ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ ПОСАДКИ ВЕРТОЛЕТОВ В СЛОЖНЫХ МЕТЕОУСЛОВИЯХ, содержащая телевизионную камеру, установленную в нижней части фюзеляжа вертолета, и устройство для отображения информации, отличающаяся тем, что в нее введены три светомаяка, установленные на посадочной площадке и размещенные в вершинах равностороннего треугольника по периметру посадочной площадки, и подключенный к ним генератор мельканий, расположенные на борту вертолета вторая телевизионная камера, оптическая ось которой направлена вдоль продольной оси вертолета, последовательно соединенные коммутатор, взаимосвязанный с двумя телевизионными камерами, блок селекции, блок координат и блок определения момента зависания, первый выход которого соединен с третьим входом коммутатора, а второй выход - с первым входом устройства для отображения информации, второй вход которого соединен с выходом блока селекции, хронизатор, вход которого объединен с третьим входом устройства для отображения информации и подключен к второму выходу коммутатора, блок формирования телевизионного индекса, блок дальности и блок измерения высоты и скорости снижения, входы которых объединены и подключены к второму выходу блока координат, а выходы соединены соответственно с четвертым, пятым и шестым входами устройства для отображения информации, а также пульт пилота, выход которого соединен с вторыми входами блока измерения высоты и скорости снижения и блока дальности, причем второй вход блока формирования телевизионного индекса соединен с третьим выходом блока определения момента зависания, а выходы хронизатора подключены к тактовым и синхронизирующим входам блоков селекции, определения момента зависания, координат формирования телевизионного индекса, дальности измерения высоты и скорости снижения.
| Устройство для ввода в пневмотранспортную установку сыпучего материала | 1986 |
|
SU1440826A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
