Изобретение представляет собой доплеровский датчик скорости, предназначенный в основном для работы в составе аппаратуры счисления координат (АСК) и относится к технике навигации.
В настоящее время АСК широко используется на морских, воздушных и наземных транспортных средствах (ТС). При этом в составе АСК этих ТС используются доплеровские датчики скорости [1], [2], [3]. Доплеровские датчики скорости (ДДС), используемые в АСК ТС, представляют собой многолучевые ДДС, состоящие функционально или конструктивно из однолучевых ДДС [1], [2], [3]. Такой однолучевой ДДС состоит из двух последовательно соединенных и разных по назначению блоков: приемоизлучающего устройства и устройства формирования доплеровских частот. При этом для обеспечения высокой точности работы при малых отношениях сигнал - помеха используют для формирования доплеровской частоты устройства следящего типа на основе систем частотной или фазовой автоподстройки [1], [2], [3].
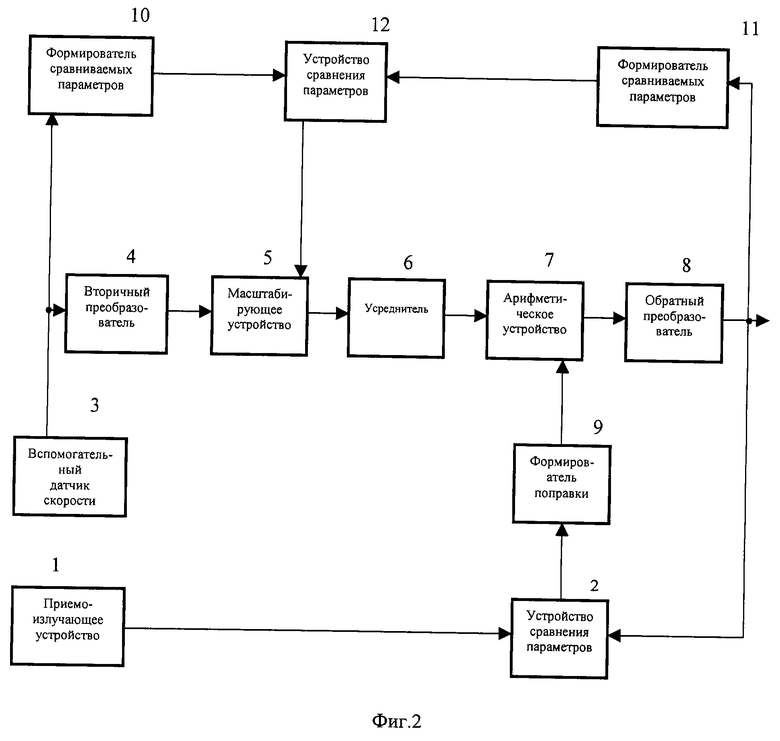
В качестве прототипа может быть взят однолучевой ДДС самолета, описанный в [2, с.63-65], структурная схема которого приведена на фиг.1
Однолучевой ДДС-прототип состоит из последовательно соединенных приемоизлучающего устройства 1, устройства сравнения параметров сигналов 2, сумматора 3 и управляемого генератора 4, выход которого является выходом ДДС и соединен со вторым входом устройства сравнивания параметров 2, второй вход сумматора 3 соединен с выходом ключевого устройства 5, сигнальный вход которого соединен с выходом устройства поиска сигнала 6, а управляющий вход соединен в выходом автомата захвата 7, вход которого соединен с выходом устройства поиска сигналов 2.
Использование в устройстве формирования доплеровской частоты системы автоподстройки частоты управляемого генератора обеспечивает высокую помехоустойчивость.
Однако в начале движения необходимо время, в течение которого сигнал устройства поиска сигналов 6 приходит на управляющий вход и изменяет его частоту до появления сигнала на выходе автомата захвата 7. Последний возникает при попадании fвых, изменяющейся под действием сигнала устройства поиска сигнала 6, в зону спектра полезного сигнала приемоизлучающего устройства 1. В этот момент ключевое устройство 5 прервет принудительную перестройку частоты управляемого генератора 4 и она будет изменяться в соответствии с сигналом устройства сравнения параметров 2. При резких изменениях скорости движения устройства сравнения параметров 2 не успевает отслеживать изменение доплеровской частоты и вырабатывать сигнал управления вследствие своей инерционности, а при пропадании сигнала (попадание сигнала на ровную водную поверхность) система перейдет или на работу по памяти (при этом fвых=const), или перейдет в режим поиска сигнала.
Все эти явления приводят к увеличению погрешности и являются недостатком данного технического решения.
Предлагаемое изобретение направлено на уменьшение погрешностей ДДС, возникающих при изменении скорости движения и пропадании сигнала.
Сущность изобретения заключается в использовании в качестве управляемого генератора вспомогательного датчика скорости (датчика воздушной скорости на самолете, лага на судах, механического датчика скорости на наземных транспортных средствах), всегда имеющегося на ТС, для чего в ДДС, состоящий из последовательно соединенных приемоизлучающего устройства и первого устройства сравнения параметров, для увеличения точности измерения скорости движения введены последовательно соединенные вспомогательный датчик скорости, вторичный преобразователь, масштабирующее устройство, усреднитель, арифметическое устройство и обратный преобразователь, выход которого является выходом всего модуля, а так же формирователь поправки, два формирователя сравниваемых сигналов и второе устройство сравнения параметров, при этом второй вход первого устройства сравнения параметров соединен с выходом обратного преобразователя и входом первого формирователя сравниваемых сигналов, а выход - с входом формирователя поправки, выход которого соединен со вторым входом арифметического устройства, вход второго формирователя сравниваемых сигналов соединен с выходом вспомогательного датчика скорости, а выход - со вторым входом второго устройства сравнения параметров, первый вход которого соединен с выходом первого формирователя сравниваемых сигналов, а выход - с управляющим входом масштабирующего устройства.
Сущность изобретения поясняется графическими материалами, где на фиг.1 проведена функциональная схема ДДС-прототипа, а на фиг.2 - функциональная схема заявляемого комплексированного доплеровского модуля.
Предлагаемое изобретение - комплексированный доплеровский модуль (КДМ) включает в свой состав последовательно соединенные приемоизлучающее устройство 1 и первое устройство сравнения параметров 2; последовательно соединенные вспомогательный датчик скорости 3, вторичный преобразователь 4, масштабирующее устройство 5, усреднитель 6, арифметическое устройство 7 и обратный преобразователь 8, выход которого является выходом всего модуля, а также формирователь поправок 9, два формирователя сравниваемых сигналов 10, 11 и второе устройство сравнения параметров 12, при этом второй вход первого устройства сравнения параметров 2 соединен с выходом обратного преобразователя 8 и входом первого формирователя сравниваемых сигналов 11, а выход - с входом формирователя поправок 9, выход которого соединен со вторым входом арифметического устройства 7, вход второго формирователя сравниваемых сигналов 10 соединен с выходом вспомогательного датчика скорости 3, а выход - со вторым входом второго устройства сравнения параметров 12, первый вход которого соединен с выходом первого формирователя сравниваемых сигналов 11, а выход - с управляющим входом масштабирующего устройства 5.
И вспомогательный датчик скорости 3, и приемоизлучающее устройство 1 являются по сути первичными преобразователями, которые при движении ТС вырабатывают сигнал, один из параметров которого (амплитуда, частота и т.д.) пропорционален скорости движения. Поскольку у сигнала ДДС параметром, пропорциональным скорости движения, является частота, то сигнал вспомогательного датчика скорости 3 с помощью вторичного преобразователя 4 должен быть приведен к аналогичному виду и приведен к одинаковому значению параметра с помощью масштабирующего устройства 5, а усреднитель 6 уменьшит флуктуации полученного значения параметра. Теперь, после приведения сигналов вспомогательного датчика скорости 3 и ДДС к одному виду и после приведения величин их информативного параметра номинально к одинаковой величине, можно подвергнуть сигнал вспомогательного датчика скорости 3 автоматической подстройке (регулированию), обеспечивая тем самым помехоустойчивое приведение параметра сигнала вспомогательного датчика скорости 3 к величине такого же параметра полезного сигнала ДДС. Поскольку информативным сигналом у приемоизлучающего устройства 1 ДДС является частота, то систему помехоустойчивой автоподстройки сигнала вспомогательного датчика скорости 3 по сигналу ДДС можно реализовать в виде частотной или фазовой автоподстройки частоты.
Особенно удобны для практической реализации системы автоподстройки в виде подстройки периода с последующим преобразованием подстроенного периода в частоту.
Для этого вторичный преобразователь 4 формирует сигнал о периоде, масштабирующее устройство 5 масштабирует его, а усреднитель 6 уменьшает его флуктуации, затем сигнал о периоде поступает в арифметическое устройство 7, где к нему добавляется поправка, пропорциональная разнице частот или разнице фаз сигнала вспомогательного датчика скорости 3 и выходного сигнала, образуемого в обратном преобразователе 8 из поправленного периода сигнала вспомогательного датчика скорости 3.
И частотные, и фазовые автоподстройки частоты обеспечивают подстройку в ограниченной области около номинального значения параметра преобразованного сигнала вспомогательного датчика скорости, называемой зоной слежения, поэтому для улучшения качества подстройки, а значит, и помехоустойчивости подстройки, необходимо расположить зону слежения около (вокруг) частоты полезного сигнала ДДС.
Для обеспечения этого производится дополнительная подстройка параметров сигнала вспомогательного датчика скорости 3 с помощью двух формирователей сравниваемых сигналов 10, 11 и второго устройства сравнения параметров 12, выходной сигнал которого изменяет параметры сигнала вспомогательного датчика скорости 3 с помощью масштабирующего устройства 5.
В данном случае формирователи сравниваемых сигналов 10, 11 представляют собой обычные счетчики, накопленные в которых количества импульсов характеризуют реальное соотношение параметров сигналов от вспомогательного и доплеровского датчиков скорости и которое вводится в масштабирующее устройство 5.
Данное техническое решение обладает высокой помехоустойчивостью и в отличие от прототипа не ухудшает точность при потере слежения, т.к. вспомогательный датчик скорости 3, выполняющий роль управляемого генератора, вырабатывает сигнал, пропорциональный скорости движения ТС, кроме того, система не требует поиска сигнала, что обеспечивает возможность ее применения на наземных ТС с их частыми остановками.
Библиографические данные
1. Колчинский В.Е, Мандуровский И.А., Константиновский М.И. Автономные доплеровские устройства и системы навигации, М., Советское радио, 1975.
2. Флеров А.Г., Тимофеев В.Т. Доплеровские устройства и системы навигации, М., Транспорт, 1987.
3. Хребтов А.А., Кошкарев В.Н., Осюхин Б.А., Виноградов К.А., Чернявец В. В. Судовые измерители скорости (справочник), Ленинград, Судостроение, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСИРОВАННЫЙ ДОПЛЕРОВСКИЙ МОДУЛЬ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2213981C2 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ПО ДВУМ СОСТАВЛЯЮЩИМ СКОРОСТИ | 2000 |
|
RU2184348C2 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ШИРОКОГО ПРИМЕНЕНИЯ | 2001 |
|
RU2193755C1 |
| ДОПЛЕРОВСКИЙ ДАТЧИК СКОРОСТИ С КОМПЕНСАЦИЕЙ ВЛИЯНИЯ ИЗМЕНЕНИЙ ОТРАЖАЮЩИХ СВОЙСТВ ПОВЕРХНОСТИ ЗЕМЛИ | 2008 |
|
RU2397506C2 |
| ДУБЛИРОВАННЫЙ ДАТЧИК ПРОЕКЦИЙ СКОРОСТИ ОТНОСИТЕЛЬНО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2003 |
|
RU2246738C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ПОКАЗАНИЙ | 2000 |
|
RU2184349C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2242767C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2001 |
|
RU2195632C2 |
| ДОПЛЕРОВСКИЙ ДАТЧИК ПРИРАЩЕНИЙ ПУТИ С УСТРОЙСТВОМ СТЕНДОВОЙ КАЛИБРОВКИ | 2003 |
|
RU2246737C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С КОМПЕНСАЦИЕЙ ПОГРЕШНОСТИ ОТ ВРАЩЕНИЯ АГРЕГАТА | 2000 |
|
RU2173834C1 |
Изобретение относится к области навигации наземных транспортных средств и представляет собой однолучевой доплеровский датчик. Изобретение позволяет повысить точность измерения скорости доплеровскими датчиками скорости, использующими для формирования выходного сигнала системы автоподстройки частоты управляемого генератора. Достигаемый технический результат достигается за счет применения в качестве управляемого генератора вспомогательного датчика скорости - датчика воздушной скорости, лага, механического датчика скорости, что позволяет исключить поиск сигнала. 2 ил.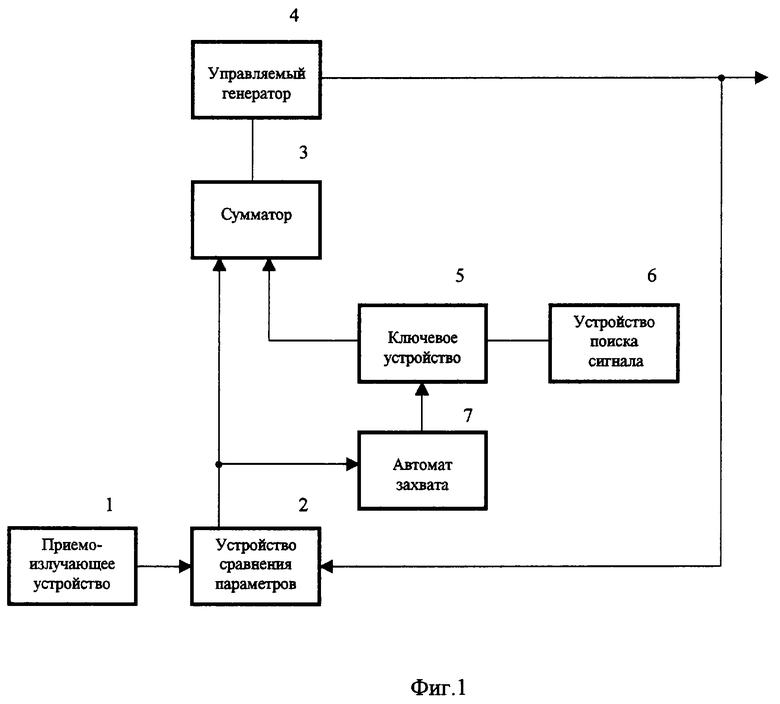
Комплексированный доплеровский модуль, состоящий из последовательно соединенных приемо-излучающего устройства, первого устройства сравнения параметров, отличающийся тем, что в него введены последовательно соединенные вспомогательный датчик скорости, вторичный преобразователь, масштабирующее устройство, усреднитель, арифметическое устройство и обратный преобразователь, выход которого является выходом всего модуля, а также формирователь поправки, два формирователя сравниваемых сигналов и второе устройство сравнения параметров, при этом второй вход первого устройства сравнения параметров соединен с выходом обратного преобразователя и входом первого формирователя сравниваемых сигналов, а выход - с входом формирователя поправки, выход которого соединен со вторым входом арифметического устройства, вход второго формирователя сравниваемых сигналов соединен с выходом вспомогательного датчика скорости, а выход - со вторым входом второго устройства сравнения параметров, первый вход которого соединен с выходом первого формирователя сравниваемых сигналов, а выход - с управляющим входом масштабирующего устройства.
| ФЛЕРОВ А.Г., ТИМОФЕЕВ В.Т | |||
| Доплеровские устройства и системы навигации | |||
| - М.: Транспорт, 1987, с.63-65 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ПОДВИЖНЫХ ОБЪЕКТОВ | 1995 |
|
RU2104554C1 |
| US 6072425, 06.06.2000 | |||
| DE 19914486, 18.05.2000. | |||

