Изобретение относится к способам определения моментов инерции тел и изделий и может быть использовано при изучении закономерностей процессов движения тел произвольной формы качением по рабочей поверхности, которые имеют место в горнорудной, строительной, химической промышленности, сельском хозяйстве при разделении насыпных грузов на фракции, в машиностроении при перемещении деталей и т.п.
Известны способы определения моментов инерции изделий (а.с. СССР 877377, кл. G 01 М 1/10, 1981, 1000812, кл. G 01 М 1/10, 1983, 1010475, кл. G 01 М 1/10, 1983), заключающиеся в сообщении изделию вращательного движения относительно заданной оси, измерении параметров движения и расчете момента инерции по формулам. При этом изделие закрепляют на торце цилиндрического барабана, который перемещают по неподвижной горизонтальной или наклонной плоскости, или цилиндрической поверхности качением.
Недостатком данных способов является то, что качением перемещают не само изделие или тело, а вспомогательный элемент (барабан или каток), в результате чего определяют момент инерции системы изделие-барабан относительно оси Z, совпадающей с осью барабана. Это ограничивает точность, так как на параметры движения системы влияет не только момент инерции тела, но и барабана.
Наиболее существенным недостатком данных способов является то, что получаемое значение момента инерции относится к плоскому движению тела, при котором ось вращения тела Z неизменна и сохраняет перпендикулярное направление к плоскости движения. Если же иметь в виду, что движение тела произвольной формы качением носит в общем случае более сложный (пространственный) характер и точкой опоры в каждый момент времени при качении может являться любая точка его поверхности, то задача намного усложняется, так как положение точки контакта в каждый момент времени практически неизвестно. При этом, так как для каждой точки поверхности имеется свое значение момента инерции, то для дальнейшего практического использования полученных результатов необходимо производить усреднение значений, что приводит к дополнительной потере точности.
Наиболее близким к предлагаемому способу является способ определения момента инерции тела при качении (патент РФ 2066857, кл. G 01 М 1/10, 1996), взятый за прототип, в котором вращательное движение сообщают непосредственно самому телу. Тело устанавливают на рабочую поверхность в виде горизонтальной плоскости, состоящей из двух частей, одна из которых выполнена с изменяемым углом наклона, вращательное движение телу сообщают плавным увеличением угла наклона части плоскости до значения α, при котором тело начинает двигаться качением по наклонной плоскости под действием собственного веса, измеряют путь и время движения тела качением по рабочей поверхности до остановки, заменяют тело расчетной моделью с заданными параметрами в виде упруговязкого призматического многогранника с количеством граней n = 180/α, поперечным сечением которого является правильный многоугольник, определяют предварительное значение момента инерции расчетной модели, представляют процесс движения расчетной модели в виде математической модели, описывающей это движение как совокупность последовательно чередующихся этапов движения на этапе перекатывания расчетной модели через опорное ребро и упругих деформаций на этапе ударного взаимодействия, когда грань расчетной модели ложится на поверхность, при определенном предварительном значении момента инерции расчетной модели рассчитывают путь движения расчетной модели, подбирая при этом значение параметра, определяющего вязкие свойства расчетной модели, при котором значение пути расчетной модели совпадает с измеренным значением пути тела. При выбранном параметре, определяющем вязкие свойства расчетной модели, рассчитывают время движения расчетной модели качением, подбирая при этом ее момент инерции, а за искомый момент инерции тела принимают значение момента инерции расчетной модели, при котором время движения расчетной модели совпадает с измеренным временем движения тела.
Недостатком описанного способа является ограниченная точность измерения времени движения тела качением, так как она связана с габаритами установки, применяемой для реализации способа. Для повышения точности измерения времени движения тела качением необходимо существенно увеличивать габариты установки. Объясняется это следующим. Наибольшая погрешность измерения времени движения тела приходится на момент остановки тела, который достаточно трудно зафиксировать без специальной аппаратуры. Чем больше продолжительность процесса движения тела качением, тем меньше влияние погрешности, возникающей при фиксации момента остановки тела, на точность конечного результата. Увеличить время движения тела можно только за счет увеличения пути движения тела путем увеличения габаритов (длины) рабочей поверхности (наклонной и горизонтальной плоскости).
Задача изобретения - повышение точности и упрощение способа определения момента инерции тела при качении за счет увеличения пути движения тела качением по рабочей поверхности без увеличения габаритов экспериментальной установки и одновременном упрощении метода оценки пройденного телом пути.
Поставленная задача решается тем, что в качестве рабочей поверхности используют подвижную цилиндрическую поверхность, которая может поворачиваться относительно заданной оси, предварительно рабочую поверхность ориентируют так, чтобы исходная точка на поверхности занимала нижнее положение, тело устанавливают на рабочую поверхность в исходной точке. Вращательное движение телу сообщают плавным поворотом поверхности на угол α, при котором тело начинает двигаться качением по цилиндрической поверхности под действием собственного веса, фиксируют рабочую поверхность в данном положении. Процесс движения расчетной модели представляют в виде математической модели движения многогранника качением по цилиндрической поверхности. Путь, пройденный телом и моделью качением, оценивают по числу проходов через нижнюю точку цилиндрической поверхности до полной остановки тела и модели.
Анализ уровня техники показал наличие новизны в предложенной совокупности новых признаков, а именно:
- использование в качестве рабочей поверхности подвижной цилиндрической поверхности;
- предварительная ориентация рабочей поверхности;
- установка тела на рабочую поверхность в исходной точке и сообщение телу вращательного движения плавным поворотом поверхности;
- составление уравнений движения модели и исследование процесса движения модели качением по цилиндрической поверхности;
- оценка пройденного пути по числу проходов через нижнюю точку цилиндрической поверхности до полной остановки тела и модели свидетельствует о новизне предлагаемого способа.
Рассмотрим влияние отличительных признаков на достижение технического результата. Для повышения точности способа необходимо увеличить время движения тела качением, что можно достигнуть увеличением пути движения тела. Использование в качестве рабочей поверхности подвижной цилиндрической поверхности позволяет увеличить путь движения тела без увеличения габаритов экспериментальной установки. Происходит это вследствие того, что при движении по цилиндрической поверхности качением до остановки тело совершает возвратно-поступательное движение, напоминающее затухающее качание маятника, проходя по рабочей поверхности несколько раз (фиг.1,б). Однако методика исследования процесса движения тела произвольной формы качением по цилиндрической поверхности с помощью математической модели является более сложной и до настоящего времени практически не была разработана.
В заявляемом способе использование подвижной цилиндрической поверхности стало возможным благодаря разработанной авторами математической модели движения тела качением по криволинейной поверхности (Лапшин В.Л., Байбородин Б.А., Белякова Л.Г. Аналитическая модель движения частицы материала качением по криволинейному виброоргану сепаратора// Обогащение руд. Сб. науч. тр. - Иркутск, 1997. С.24-29.).
Предварительная ориентация рабочей поверхности и последующая установка тела в исходной точке обеспечивают наиболее полное использование рабочей поверхности, так как в этом случае движение тела начинается на одном конце поверхности в направлении другого конца. В противном случае на поверхности могут оставаться не используемые в процессе эксперимента участки. Таким образом данные операции позволяют до минимума уменьшить размеры рабочей поверхности и экспериментальной установки в целом и упростить способ.
При выполнении экспериментальной части способа необходимо обеспечить плавное начало движения тела качением под действием собственного веса. Качение начинается в тот момент, когда при увеличении угла наклона касательной к цилиндрической рабочей поверхности в исходной точке центр тяжести тела переходит за точку опоры тела. Опрокидывающий момент действующих на тело сил превышает удерживающий момент и начинается движение тела качением. Практически это достигается плавным поворотом рабочей поверхности. Фиксация рабочей поверхности в момент начала движения тела качением необходима для того, чтобы зафиксировать и измерить угол поворота поверхности и обеспечить дальнейшее движение тела качением по неподвижной рабочей поверхности, как предусмотрено способом. Таким образом данные операции являются неотъемлемой частью способа.
Для моделирования процесса на компьютере и осуществления расчетов необходима разработка и использование математической модели движения многогранника качением по цилиндрической поверхности. Необходимость моделирования рассматриваемого процесса объясняется тем, что момент инерции тела нельзя измерить непосредственно в ходе эксперимента. Это параметр (как и ряд других), к которому можно прийти только расчетным путем на основе исходных данных о динамике движения тела. Разработка данной модели процесса потребовала проведения дополнительных теоретических исследований, о чем уже говорилось выше.
Путь, пройденный телом и моделью качением, оценивают по числу проходов через нижнюю точку цилиндрической поверхности до полной остановки тела и модели. Данный отличительный признак обеспечивает упрощение способа при определении пути движения тела. Траектория движения тела носит сложный характер, так как тело неоднократно изменяет направление движения. Для осуществления непосредственного измерения необходимо в ходе эксперимента зафиксировать все отрезки траектории движения тела, что усложнило бы способ. Число проходов тела через нижнюю точку рабочей поверхности до полной остановки можно зафиксировать визуально без каких-либо трудностей.
С другой стороны данный параметр однозначно характеризует рассеяние энергии в процессе качения тела и модели, т.е. потери энергии при переходе ее из кинетической в потенциальную и наоборот. Чем больше будут потери энергии на преодоление сопротивлений движению, тем меньше колебаний совершит маятник или другая колебательная система. В нашем случае будет наблюдаться та же взаимосвязь между путем движения и числом проходов через нижнюю точку поверхности, что позволяет использовать данный параметр в предлагаемом способе с целью его упрощения.
Дополнительный поиск известных решений с признаками, совпадающими с отличительными от прототипа признаками заявляемого способа, не выявил влияния существенных признаков на достижение поставленного технического результата. Поэтому заявляемое изобретение соответствует критерию "изобретательский уровень".
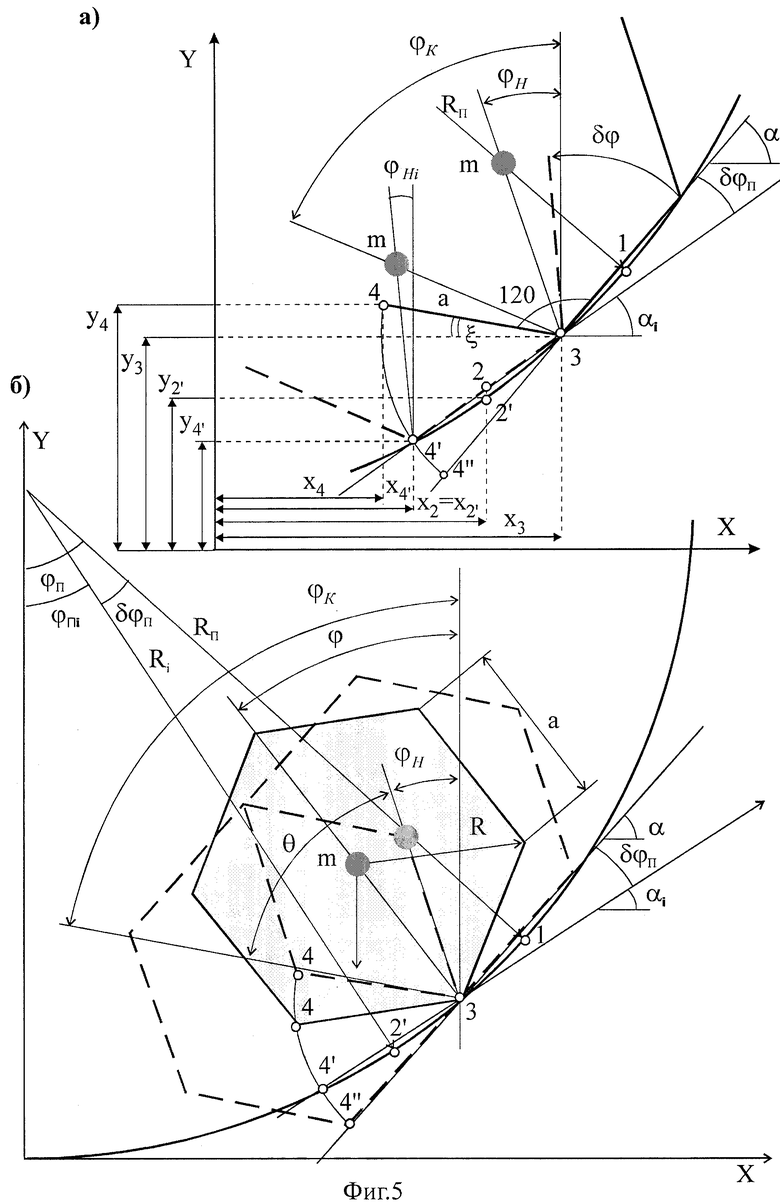
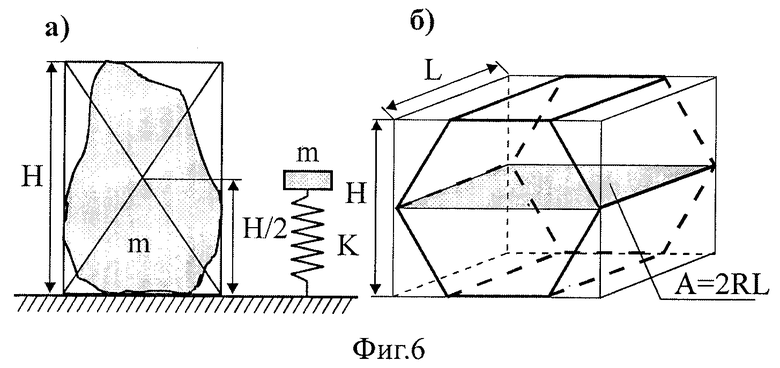
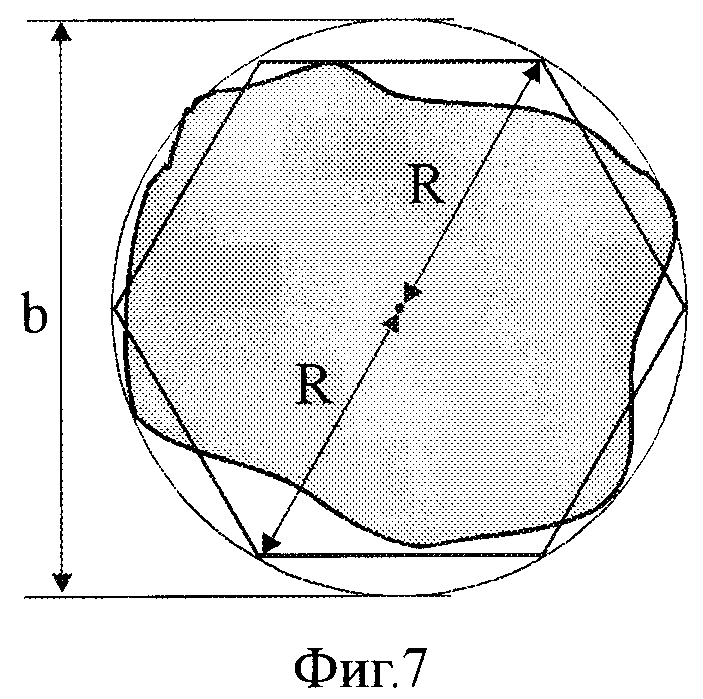
Сущность изобретения поясняется чертежами, где на фиг.1 изображены варианты схемы установки, с помощью которой реализуется способ: а) поворот поверхности осуществляется относительно неподвижной оси крепления поверхности, исходное положение, б) начало движения тела качением, в) поворот осуществляется путем перекатывания поверхности по горизонтальной плоскости: на фиг.2 - схема модели в виде шестигранника; на фиг.3 - схема определения угла поворота модели; на фиг.4 - схема упругого и вязкого элементов модели; на фиг. 5 - схема качения модели по криволинейной поверхности; а) схема определения конца поворота модели, б) общий план процесса качения модели; на фиг.6 - схема, поясняющая определение упругого элемента модели: а) схема тела, б) схема модели; на фиг.7 - схема, поясняющая определение поперечного размера модели; на фиг.8 - фотография испытуемых образцов; на фиг.9 - схема для расчета приближенного значения момента инерции модели. На чертежах приняты следующие обозначения:
D1 - исходная точка; D2, D3, D4, D5, D6 точки, в которых направление движения тела меняется на противоположное; D7 - точка остановки тела; α - угол поворота поверхности; α1 - вспомогательный угол; О - заданная ось поворота; Rп - радиус кривизны подвижной цилиндрической поверхности; П - рабочая поверхность, в качестве которой используется подвижная цилиндрическая поверхность; s, h - координаты исходной точки D1 в момент начала процесса качения; R - радиус описанной окружности модели; r - радиус вписанной окружности модели; а - сторона многоугольника; m - масса тела; g - ускорение свободного падения (g=9,81м/c); 2γ - угол между соседними радиусами многоугольника; ϕн - начальный угол поворота модели; ϕк - конечный угол поворота модели; θ угол поворота модели; β - половина угла многоугольника; ξ - угол наклона грани многоугольника к горизонтали;  угловая скорость; К, С - упругий и вязкий параметры модели; ϕп - угол наклона касательной к цилиндрической поверхности; Н - высота тела; L - длина многогранника; А - площадь сечения модели, нормального к направлению деформации; b - наибольший поперечный размер тела.
угловая скорость; К, С - упругий и вязкий параметры модели; ϕп - угол наклона касательной к цилиндрической поверхности; Н - высота тела; L - длина многогранника; А - площадь сечения модели, нормального к направлению деформации; b - наибольший поперечный размер тела.
Заявляемый способ осуществляется следующим образом. Исследуемое тело устанавливают на подвижную цилиндрическую поверхность П в исходной точке D1 (фиг.1,а). Касательная к этой поверхности в точке D1 занимает горизонтальное положение. Плавно поворачивают рабочую поверхность относительно оси вращения О на угол α, при котором тело начинает двигаться качением по цилиндрической поверхности под действием собственного веса и фиксируют поверхность в данном положении (фиг. 1, б). Движение тела качением напоминает затухающее качание маятника. Высота подъема тела по цилиндрической поверхности при движении качением вследствие потерь энергии с каждым разом уменьшается (фиг.1,б). После первого прохода качением по рабочей поверхности тело поднялось до точки D2, после второго прохода до точки D3 и т.д., пока не остановилось в точке D7. Точка остановки D7 всегда является нижней точкой цилиндрической поверхности. Измеряют время движения тела качением до остановки и оценивают пройденный телом путь по числу проходов через нижнюю точку цилиндрической поверхности. В нашем случае число проходов равно шести. Определяют количество граней (углов) n модели по формуле n = 180/α.
С целью упрощения конструкции установки и уменьшения габаритов рабочую поверхность можно не закреплять в центре кривизны (радиус кривизны Rп может составлять несколько метров). В этом случае определение угла α производится следующим образом (фиг.1,в). Рабочую поверхность устанавливают на горизонтальную плоскость таким образом, чтобы касательная в точке D1 занимала горизонтальное положение. Поворот поверхности на угол α осуществляют путем плавного медленного перекатывания поверхности по горизонтальной плоскости до момента начала движения тела качением. Фиксируют рабочую поверхность в данном положении и измеряют размеры S, h. Угол α рассчитывают по формуле:
α = arctg(h/S), (1)
т.к. α1 = α/2, α1 = arctg(h/S).
Можно предложить и другие технические решения поворота поверхности, которые также обеспечивают плавное изменение угла наклона касательной к цилиндрической поверхности в исходной точке. Конструктивная реализация способа не является предметом изобретения и может иметь разные варианты.
Рассмотрим более подробно математическую часть заявляемого способа. В качестве примера примем модель в виде шестигранника. Качение начинается при угле α, при котором центр тяжести многогранника переходит за опорное ребро (ребро поворота). Предельный случай равновесия модели соответствует положению, когда опрокидывающий и удерживающий моменты равны (фиг.2):
mgrSinα = mgaCosα/2. (2)
Преобразуем (2), сокращая левую и правую часть: rtgα = a/2. Если учесть, что tgγ = a/2r, то условие равновесия получается в виде:
α = γ. (3)
При этом 2γ = 360/n, откуда n = 180/γ.
Качение модели начинается в случае α+Δα, когда выполняется условие α+Δα>γ, и центр тяжести переходит за опорное ребро, создавая опрокидывающий момент. Поскольку Δα может быть очень малая величина, то практически началом качения может служить условие (3), откуда получается формула для определения числа граней многогранника, качение которого начинается при угле α: n = 180/α.
При варьировании параметра n изменяют склонность модели к опрокидыванию относительно опорного ребра многогранника и к дальнейшему движению качением, что позволяет при изменении n от четырех до бесконечности охватить практически все многообразие реальных грузов с точки зрения склонности тела к движению качением, от плоских тел до тел округлой формы, В результате наблюдается адекватность модели частицам реального материала по данному параметру. Повторяя опыт многократно, уменьшают влияние случайных погрешностей на точность измерений.
Далее заменяют тело расчетной моделью с заданными параметрами в виде упруговязкого призматического многогранника с количеством граней n = 180/α, поперечным сечением которого является правильный многоугольник. Определяют предварительное значение момента инерции расчетной модели, представляют процесс движения расчетной модели в виде математической модели, описывающей это движение как совокупность последовательно чередующихся этапов движения на этапе перекатывания расчетной модели через опорное ребро и упругих деформаций на этапе ударного взаимодействия, когда грань расчетной модели ложится на поверхность. Для этого описывают с помощью дифференциальных уравнений процесс качения модели по цилиндрической поверхности на этапе поворота модели при перекатывании через ребро и на этапе ударного взаимодействия с рабочей поверхностью, когда грань ложится на поверхность.
Ранее было получено уравнение вращательного движения модели (см. прототип):
где Iz - момент инерции модели относительно оси поворота; ϕ - текущее значение угла поворота модели;  ускорение вращательного движения.
ускорение вращательного движения.
Это уравнение описывает динамику вращательного движения модели при повороте от ϕн дo ϕк (фиг. 3). В начальный момент (фиг.2) значение угла ϕн практически лежит на вертикали, проходящей через точку поворота и равно нулю.
Определяется угол поворота модели θ:
θ = 180-2β, 2β = 180-2γ
Тогда получается θ = 2γ, γ = 180/n.
Для рассматриваемого случая ϕн = 0,ϕк = ϕн+2γ. Данные выкладки и уравнение движения справедливы для модели с любым количеством граней, т.к. их число определяет только величину γ и, следовательно, конечный угол поворота ϕк. Однако, поскольку углу ϕн соответствует состояние равновесия модели, то для того, чтобы модель пришла в движение, необходимо начальному значению дать любое малое приращение (например, равное одной минуте).
Когда текущий угол ϕ становится равным ϕк, переходят ко второму этапу движения тела. Ударное взаимодействие модели с рабочей поверхностью описывают с помощью механореологических упруговязких моделей, предполагая отсутствие пластических деформаций. На данном этапе рассматривается линейное перемещение центра тяжести модели по оси Y вследствие деформации тела и рабочей поверхности, вызванное ударным взаимодействием системы тело-поверхность. Начальная скорость движения модели для данного этапа по оси Y (фиг.4) определяется по формуле:  где:
где:  угловая скорость в момент удара.
угловая скорость в момент удара.
Вращательное движение модели переходит в поступательное, обусловленное деформацией сжатия. Начальную деформацию упруговязкого элемента принимают равной нулю. Движение модели описывают уравнением вида: (5)
(5)
где  ускорение, скорость и величина деформации модели по оси Y.
ускорение, скорость и величина деформации модели по оси Y.
Окончанию этапа соответствует момент времени, когда деформация становится равной нулю (у=0). Начальные условия для этапа поворота модели относительно следующего опорного ребра: 
Таким образом, два этапа движения постоянно чередуются в процессе качения модели.
В случае, когда качение происходит по кривой поверхности, надо иметь в виду следующее.
Уравнение (4) описывает динамику движения центра тяжести модели при повороте относительно опорного ребра (точка 3, фиг.5). Рассмотрим сначала более подробно движение качением по плоскости. В общем случае начальными и конечными значениями угла поворота являются ϕн и ϕк причем для плоскости эти величины легко определяются (для выбранного многоугольника) и остаются постоянными на протяжении всего этапа качения. Угол поворота модели при перекатывании через опорное ребро θ = ϕк-ϕн. Конец поворота соответствует положению, когда точка 4 ложится на плоскость и совмещается с точкой 4". Текущее значение угла поворота обозначается через ϕ, при этом нулевое значение угла лежит на вертикали, проходящей через ось поворота (точка 3). Положительное направление ϕ против часовой стрелки.
Второй поворот происходит относительно следующей грани, т.е. точка поворота перемещается на ширину грани а в направлении качения (точка 4"). При этом начальная величина угла ϕ опять принимает значение ϕн, а угол поворота равен θ.
Таким образом, процесс качения разбивается на отдельные этапы, каждый из которых соответствует повороту модели относительно опорной грани, и описывается уравнением (4) вращательного движения. Поступательное перемещение центра тяжести модели определяется из выражения хs= ak, где k - количество поворотов относительно ребра, а - ширина грани многогранника.
Разработана методика исследования процесса движения модели качением по цилиндрической поверхности. Вследствие кривизны угол α для разных точек поверхности является переменным и определяется через угол ϕп наклона касательной к кривой: α = ϕп. Основными параметрами криволинейной поверхности являются уравнение кривой у=f(x), характеризующее форму, угол наклона касательной к поверхности органа ϕп и радиус кривизны Rп. Для цилиндрической поверхности постоянного радиуса кривизны уравнение кривой имеет вид:
x2+(y-Rп)2=RП 2 (6)
где х, у координаты точек цилиндрической поверхности, расположенной симметрично относительно оси Y и проходящей через начало координат.
Все отличие данного процесса от движения качением по плоскости заключается в определении начальных и конечных параметров поворота модели.
Вычисления производятся с использованием численных методов с шагом dt. Поворот происходит относительно точки 3 (фиг.5). Считаются известными все исходные параметры процесса, так как они определяются исходя из предыдущего шага вычисления (этапа движения). К ним относятся угол наклона касательной ϕп = α, угол α (данные параметры рассчитываются для точки 1, расположенной посередине стороны многоугольника), начальный угол поворота модели ϕн, координаты точки поворота x3, у3. На шаге вычисления dt по уравнению (4) определяется новое значение угла поворота модели ϕ. Конец поворота модели соответствует моменту времени, когда траектория движения точки 4 пересекает цилиндрическую поверхность, т.е. точка 4 совмещается с 4', лежащей на кривой. На чертеже видно, что этот момент наступает раньше, чем при движении по плоскости.
Условие контакта можно записать в следующем виде: у4=у4. Контроль данного условия в процессе пошагового вычисления производится следующим образом. Рассчитываются координаты
x4 = x3-aCosζ, y4 = y3+aSinξ, ξ = 180-α-(ϕ-ϕн)-120.
В рассматриваемой задаче в качестве модели принят шестиугольник, внутренний угол которого составляет 120 градусов. Далее определяется координата кривой у4'=f(x4) и производится проверка выполнения условия y4=y4'.
Если у4> у4', переходят к следующему шагу вычисления t=t+dt. Рассчитывают очередное значение ϕ и производят проверку у4=у4'. Выполнение условия означает, что поворот модели завершен, точки 4 и 4' совпали и сторона многоугольника легла на криволинейную поверхность.
Для определения параметров кривой в новом положении модели производят расчеты для точки 2, лежащей посередине стороны многоугольника. Рассчитывают координату y4'= f(x4). Затем переходят на кривую в точку 2' с координатами х2'=x2, у2'=f(x2') и рассчитывают угол наклона касательной  В нашем случае при Rп-const можно записать:
В нашем случае при Rп-const можно записать: 
Следующий поворот модели происходит относительно точки 4'. Для осуществления расчета необходимо определить начальный угол поворота  для нового положения модели:
для нового положения модели:  где 120/2 половина внутреннего угла шестиугольника.
где 120/2 половина внутреннего угла шестиугольника.
Расчет поворота относительно следующей точки осуществляется аналогичным образом. С целью упрощения расчет параметров при движении можно осуществить более простым, но менее точным образом:  где
где 
Поступательное перемещение модели по цилиндрической поверхности за один поворот Si определяется из выражения:  Полное перемещение модели за этап движения качением определяется как сумма Si или упрощенно xs=ak.
Полное перемещение модели за этап движения качением определяется как сумма Si или упрощенно xs=ak.
Упругий параметр модели К упрощенно можно определять из предположения, что материал является изотропным, а тело имеет форму правильной призмы, продольное сечение которой прямоугольник (фиг.6). Жесткость призматического стержня в продольном направлении (по оси Y) можно определить из закона Гука ΔH = FH/AE, принимая ΔH = 1, где F сжимающая сила: F= Кст=АЕ/Н. Если привести массу m к центру тяжести и рассматривать его перемещение по оси Y, вызванное деформацией сжатия вследствие ударного взаимодействия, то получается формула для расчета К:
К=2АЕ/Н,
где Е модуль упругости материала.
При необходимости можно на основе аппарата теории упругости получить более точные формулы для расчета упругих коэффициентов К, учитывающие реальную форму тела и упругие свойства основания.
Величину R рекомендуется принимать равной половине наибольшего поперечного размера тела (фиг.7): R=b/2.
Далее описывают с помощью математической модели процесс качения многогранника по рабочей поверхности. Весь процесс представляют, как совокупность двух чередующихся этапов: поворота модели при перекатывании через опорное ребро и ударного взаимодействия с рабочей поверхностью, когда грань ложится на плоскость.
Для определения вязкого параметра С исследуют на ЭВМ движение модели качением по криволинейной поверхности. В ходе качения под уклон происходит разгон модели (тела), а при движении на подъем - торможение. Причем вследствие рассеяния энергии тело поднимается на меньшую высоту. На модели диссипация энергии учитывается вязким элементом С. Вязкие сопротивления, возникающие при деформации тела, принимаются пропорциональными скорости деформации. Аэродинамические сопротивления при движении тела качением, с целью упрощения, не принимаются во внимание.
В случае С= 0 движение модели качением будет бесконечным, т.е. после спуска модель поднимается качением по криволинейной поверхности на такую же высоту. Подбирая значение С, обеспечивают путь движения модели равным пути движения реального тела. В предлагаемом способе оценка пути производится по количеству проходов модели (тела) через нижнюю точку криволинейной поверхности. Время движения тела зависит от его инерционных свойств, которые при вращательном движении характеризуются моментом инерции. Подбирая момент инерции модели Iz относительно ребра поворота, обеспечивают совпадение продолжительности движения тела и модели.
Когда обеспечено совпадение по основным параметрам процессов движения тела и модели, а именно: массе и размерам, склонности к опрокидыванию и перекатыванию, упругим и диссипативным свойствам, пути и времени движения а следовательно, скорости и ускорению движения, можно говорить об адекватности модели исследуемому телу по основным параметрам процесса качения.
Если рассматривать отдельно каждый поворот тела относительно точки опоры при качении, то могут наблюдаться существенные отличия по сравнению с моделью. Например, мгновенный момент инерции для данной точки опоры тела может не совпадать со средним значением для модели, определяемым по методике. Но поскольку на практике в первую очередь представляют интерес параметры процесса в целом, т. е. средние значения скорости, ускорения, пути и времени движения, на основе которых осуществляют исследование, совершенствование и оптимизацию оборудования, то предлагаемый способ можно признать вполне пригодным для определения основных параметров процесса качения тела. Он обеспечивает адекватность модели реальному процессу и возможность аналитического исследования процесса движения тел качением по рабочим поверхностям практически любой формы.
Были проведены специальные эксперименты с использованием четырех образцов в виде стальных призматических многогранников (фиг.8):
1 - восьмигранник, R=10,2 мм, m=0,09 кг;
2 - восьмигранник, R=12,6 мм, m=0,165 кг;
3 - двенадцатигранник, R=8,6 мм, m=0,06 кг;
4 - двенадцатигранник, R= 12,15 мм, m=0,165 кг;
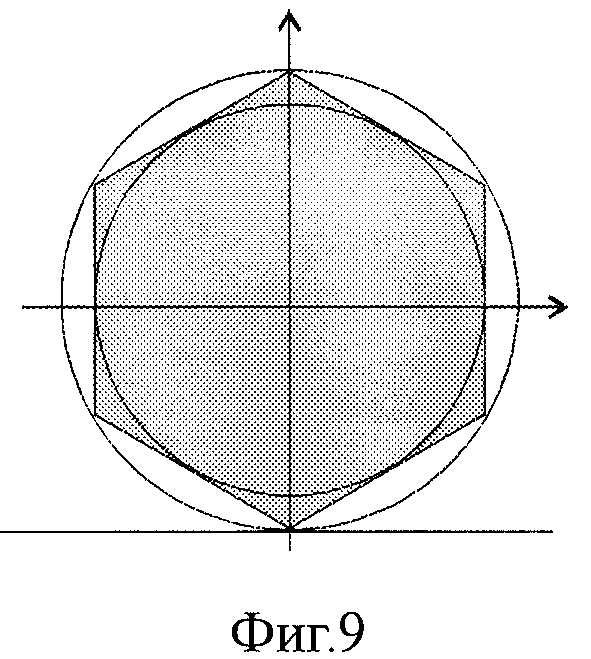
Значение момента инерции многогранника при повороте относительно опорного ребра находится между значениями моментов инерции катящихся цилиндров, поперечные сечения которых ограничиваются описанной и вписанной окружностями многоугольника (фиг. 9). Таким образом были получены точные диапазоны значений, в которых должны находиться моменты инерции многогранников при качении:
I1=l2,2-14 кг•мм2, I2=33,9-39,3 кг•мм2,
I3=6,28-6,66 кг•мм2, I4=34,2-36,5 кг•мм2
В результате расчета данных параметров по предлагаемому способу были получены значения, которые являются более точными по сравнению с прототипом:
I1=13,2 кг•мм2, I2=36,8 кг•мм2, I3=6,5 кг•мм2, I4=35,35 кг•мм2
Таким образом, повышение точности при одновременном упрощении способа и уменьшении габаритов экспериментальной установки было достигнуто за счет того, что использование криволинейной поверхности радиусом 1,5 м позволило существенно увеличить время движения тела качением.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА ПРИ КАЧЕНИИ | 1992 |
|
RU2066857C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1996 |
|
RU2104232C1 |
| АКСИАЛЬНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ | 2006 |
|
RU2313675C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСТАТОЧНЫХ НАПРЯЖЕНИЙ | 1996 |
|
RU2121666C1 |
| СТАНОК ДЛЯ ОТДЕЛОЧНО-УПРОЧНЯЮЩЕЙ ОБРАБОТКИ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1997 |
|
RU2124431C1 |
| Способ управления формированием структуры и параметров вибрационного поля технологической машины | 2018 |
|
RU2691646C1 |
| БУРОВАЯ АЛМАЗНАЯ КОРОНКА | 2000 |
|
RU2167261C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНИЦЫ УСТОЙЧИВОГО РЕЗАНИЯ НА ТОКАРНЫХ СТАНКАХ С УЧЕТОМ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЗАГОТОВКИ | 2000 |
|
RU2182860C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2118469C1 |
| СПОСОБ ЛЕНТОЧНОГО ШЛИФОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2142872C1 |
Способ может быть использован для оптимизации процессов движения тел произвольной формы, которые имеют место в индустрии обогащения полезных ископаемых, строительной, химической промышленности, сельском хозяйстве, в машиностроении. Способ обеспечивает формирование адекватной математической модели процесса движения тела качением, при этом параметры расчетной модели характеризуют реальные свойства тела, основными из которых являются масса, форма и размеры тела, упругие и диссипативные свойства материала и момент инерции тела при качении. Способ предусматривает проведение эксперимента, в ходе которого исследуется процесс движения реального тела качением с помощью экспериментальной установки. По результатам экспериментальных данных формируется математическая модель и рассчитываются ее параметры, важнейшим из которых является момент инерции тела. В качестве рабочей поверхности используют цилиндрическую поверхность, вращательное движение сообщают непосредственно самому телу плавным поворотом рабочей поверхности, что обеспечивает повышение точности и упрощение способа. Процесс движения расчетной модели представляют в виде математической модели движения многогранника качением по цилиндрической поверхности, пройденный телом и моделью путь оценивают по числу проходов через нижнюю точку цилиндрической поверхности до полной остановки тела и модели. 9 ил.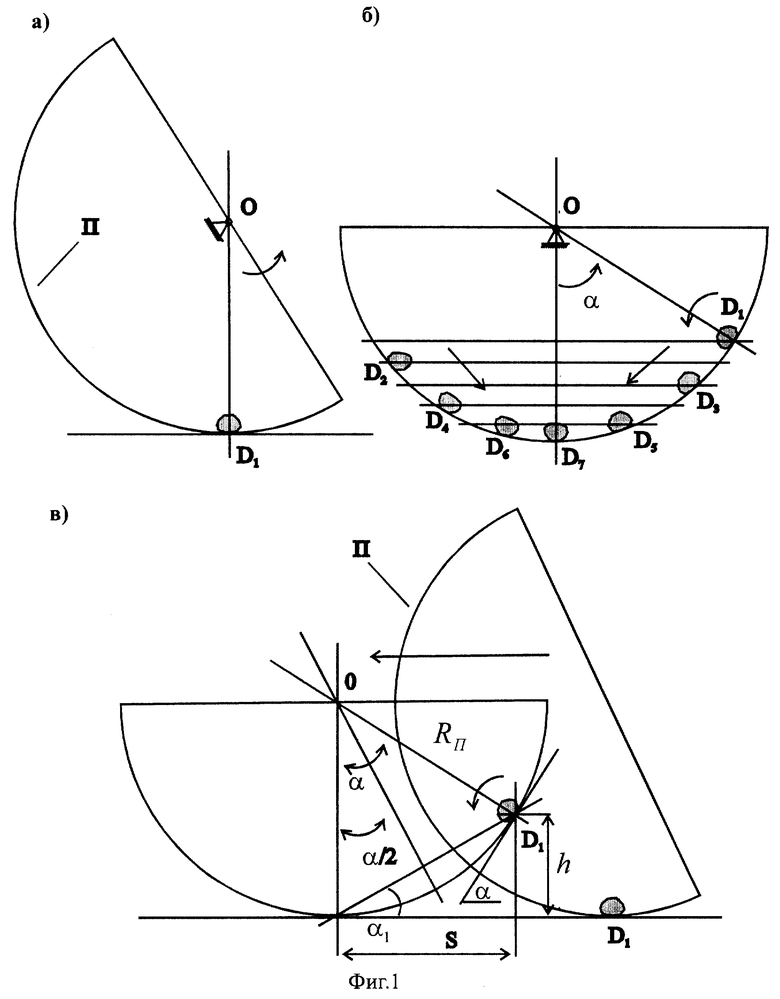
Способ определения момента инерции тела при качении, заключающийся в том, что вращательное движение сообщают непосредственно телу, оценивают путь и время движения тела качением по рабочей поверхности до полной остановки, заменяют тело расчетной моделью с заданными параметрами в виде упруговязкого призматического многогранника с количеством граней n = 180/α, поперечным сечением которого является правильный многоугольник, определяют предварительное значение момента инерции расчетной модели, представляют процесс движения расчетной модели качением по рабочей поверхности в виде математической модели, описывающей это движение как совокупность последовательно чередующихся этапов - движения на этапе перекатывания расчетной модели через опорное ребро и упругих деформаций на этапе ударного взаимодействия, когда грань расчетной модели ложится на поверхность, при определенном предварительном значении момента инерции расчетной модели рассчитывают путь движения расчетной модели, подбирая при этом значение параметра, определяющего вязкие свойства расчетной модели, при котором значение пути расчетной модели совпадает с измеренным значением пути тела, при выбранном параметре, определяющем вязкие свойства расчетной модели, рассчитывают время движения расчетной модели качением, подбирая при этом ее момент инерции, а за искомый момент инерции тела принимают значение момента инерции расчетной модели, при котором время движения расчетной модели совпадает с измеренным временем движения тела, отличающийся тем, что в качестве рабочей поверхности используют подвижную цилиндрическую поверхность, которая может поворачиваться относительно заданной оси, предварительно рабочую поверхность ориентируют так, чтобы исходная точка на поверхности занимала нижнее положение, тело устанавливают на рабочую поверхность в исходной точке, вращательное движение телу сообщают плавным поворотом поверхности на угол α, при котором тело начинает двигаться качением по цилиндрической поверхности под действием собственного веса, фиксируют рабочую поверхность в данном положении, процесс движения расчетной модели представляют в виде математической модели движения многогранника качением по цилиндрической поверхности, путь, пройденный телом и моделью качением, оценивают по числу проходов через нижнюю точку цилиндрической поверхности до полной остановки тела и модели.
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА ПРИ КАЧЕНИИ | 1992 |
|
RU2066857C1 |
| ОТВЕС | 1992 |
|
RU2069311C1 |
| Способ определения момента инерции изделий | 1981 |
|
SU1000812A1 |
| US 5018382, 28.05.1991. | |||

