Изобретение относится к автоматической оптимизации многопараметрических объектов управления, обладающих одноэкстремальной функцией качества, основанной на каком-либо критерии оптимальности.
Известны способы случайного поиска экстремума функции качества одноэкстремальных многопараметрических объектов, заключающиеся в формировании случайных входных шаговых воздействий на объект управления [1].
Недостатком таких способов является применение равномерно распределенных случайных входных воздействий, что приводит к значительному снижению их эффективности и быстродействия.
Известен также способ поиска глобального экстремума функции качества многоэкстремальных многопараметрических объектов, основанный на формировании случайных входных шаговых воздействий на объект управления, распределенных по нормальному закону [2]. Однако алгоритм поиска глобального экстремума, используемый в этом способе, является неэффективным и недостаточно быстродействующим при поиске экстремума одноэкстремальной функции качества многопараметрического объекта. Это объясняется тем, что при поиске глобального экстремума по этому способу в случае удачного шага среднее квадратическое отклонение увеличивается, что необходимо при анализе удаленных областей функции качества для обнаружения в них возможных экстремумов. В случае поиска единственного экстремума подобное решение значительно увеличивает время поиска.
Наиболее близким к изобретению по технической сущности является способ, основанный на формировании случайных равномерно распределенных входных шаговых воздействий на объект управления и адаптации их распределения [2].
Недостатком этого способа является невысокое быстродействие поиска.
Предлагаемый способ заключается в том, что создается режим адаптивного случайного поиска в пространстве оптимизируемых параметров, основанный на формировании случайных входных шаговых воздействий на объект управления, распределенных по нормальному закону, математическое ожидание и среднее квадратическое отклонение которых автоматически адаптируется в зависимости от сигнала, поступающего с выхода объекта по каналу обратной связи.
На чертеже представлена блок-схема алгоритма, реализующего предлагаемый способ автоматической настройки многопараметрических систем автоматического управления на оптимальные условия (вариант алгоритма с пересчетом, для определенности представлен случай минимизации функции качества).
Способ реализуется с помощью алгоритма, блок-схема которого включает в себя:
1 - блок формирования шага в случайном направлении в пространстве оптимизируемых параметров в соответствии с нормальным законом распределения, 2 - блок запоминания сформированного шага, 3 - блок определения значения функции качества в новой точке пространства оптимизируемых параметров, 4 - блок определения знака приращения функции качества, 7 - блок запоминания значения функции качества при удачном шаге, 5 и 8 - блоки адаптации распределения направления случайных шагов в пространстве оптимизируемых параметров, 6 - блок формирования шага в обратном направлении при неудачном шаге.
Предлагаемый способ реализуется следующим образом.
В пространстве оптимизируемых параметров из исходного состояния Xi делается шаг в случайном направлении в соответствии с нормальным законом распределения. Если значение функции качества в новом состоянии G(Xi+1) больше или равно значению функции качества в исходной точке Q(Хi), то есть случайная проба Θ оказалась неудачной (задача минимизации), то система возвращается в первоначальное состояние Хi, после чего снова формируется случайный шаг, отсчитанный из старого состояния.
Рекуррентная формула для смещения в пространстве оптимизируемых параметров по этому алгоритму имеет следующий вид: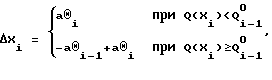
где Qi 0=minQ(Xj), j=1,...,i - наименьшее значение функции качества за i предыдущих шагов поиска;
Θ - единичный случайный вектор, распределенный по нормальному закону,
а - величина рабочего шага.
Адаптация распределения направления случайных шагов заключается в изменении их математического ожидания и среднего квадратического отклонения на основе знака приращения функции качества (блоки 5 и 8). Алгоритм непрерывной адаптации математического ожидания случайных шагов можно представить в виде следующего векторного рекуррентного соотношения:
Wi+1 = kWi-δΔQiΔXi,
где W - математическое ожидание нормально распределенных случайных шагов;
k - коэффициент запоминания (≤k≤1);
δ - параметр скорости обучения (δ>0).
При работе по этому алгоритму адаптации вектор W стремится перестроиться в направлении, обратном градиенту функции качества оптимизируемого объекта, то есть шаги поиска будут в среднем направлены в сторону быстрейшего уменьшения функции качества.
Алгоритм адаптации среднего квадратического отклонения направления случайных шагов можно представить в виде следующего выражения: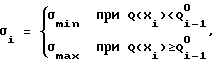
где σi - текущая величина среднего квадратического отклонения;
σmin и σmax - минимальное и максимальное значения среднего квадратического отклонения.
Смысл этого алгоритма заключается в следующем. Если на очередном шаге поиска оптимизируемый объект сместился в пространстве параметров в сторону уменьшения функции качества, то есть был сделан удачный шаг, то спектр возможных направлений следующего шага сужается вокруг найденного удачного направления на текущем шаге, позволяя уточнить положение экстремума. Если же текущий шаг оказался неудачным, то есть значение функции качества увеличилось, то при следующем шаге спектр возможных направлений поиска расширяется, позволяя охватить новые области пространства параметров.
Экспериментальные исследования, проведенные на ряде модельных функций, охватывающих различные классы реальных многопараметрических одноэкстремальных объектов управления, позволили определить оптимальные численные значения минимального и максимального среднего квадратического отклонения:
σmin = 0,1 и σmax = 3.
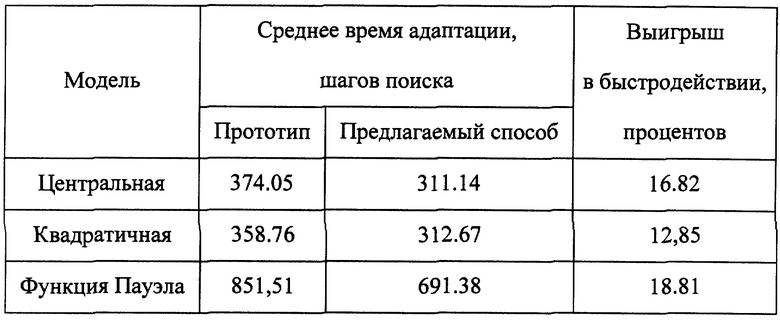
Достигаемый технический эффект от применения предлагаемого способа позволяет уменьшить потери на поиск и повысить быстродействие отыскания экстремума: экспериментальные исследования, проведенные на модельных функциях, показали, что выигрыш в быстродействии предлагаемого способа по сравнению с прототипом составил от 12 до 18 процентов в зависимости от вида модельной функции (см. таблицу).
Центральная модель:
Квадратичная модель:
где [А,Х] - скалярное произведение вектора параметрических коэффициентов А= (a1, a2, а3, a4)T и вектора входных координат Х=(х1, х2, x3, х4)T, ai=1, i=1...4, bij, - элементы матрицы: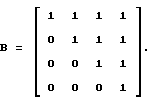
Функция Пауэла:
Q(X)=(х1+10х2)2+5(х3-х4)4+(х2-2х3)4+10(х1-х4)4.
Все модельные функции имеют один минимум при хi=0, i=1...4.
При проведении сравнительного тестирования использовался одинаковый для всех моделей набор из ста начальных точек поиска, координаты которых представляли собой случайные равномерно распределенные числа в пределах от минус 10 до плюс 10. Цикл поиска экстремума для каждой начальной точки повторялся 1000 раз. Для всех трех моделей параметры поиска были одинаковыми: шаг поиска а=0,15; коэффициент запоминания k=0,7; параметр скорости обучения δ=0,1. Поиск экстремума производился с точностью до 0,01.
Источники информации
1. Растригин Л. А. Системы экстремального управления. М.: Наука, 1974, с.422-432.
2. Растригин Л. А. Системы экстремального управления. М.: Наука, 1974, с.500-505.
3. Растригин Л. А. Адаптация сложных систем. Рига: Зинатие, 1981, с. 88-91, с.107-109 (прототип).
Изобретение относится к автоматической оптимизации многопараметрических объектов управления, обладающих одноэкстремальной функцией качества, основанной на каком-либо критерии оптимальности. Технический результат заключается в повышении быстродействия самонастройки. Способ реализуется следующим образом. В пространстве оптимизируемых параметров из исходного состояния делается шаг в случайном направлении в соответствии с нормальным законом распределения. Если значение функции качества в новом состоянии больше или равно значению функции качества в исходной точке (то есть случайная проба оказалась неудачной), то система возвращается в первоначальное состояние, после чего снова формируется случайный шаг, отсчитанный из старого состояния. Адаптация распределения случайных шагов заключается в изменении их математического ожидания и среднего квадратического отклонения на основе знака приращения функции качества. 1 ил., 1 табл.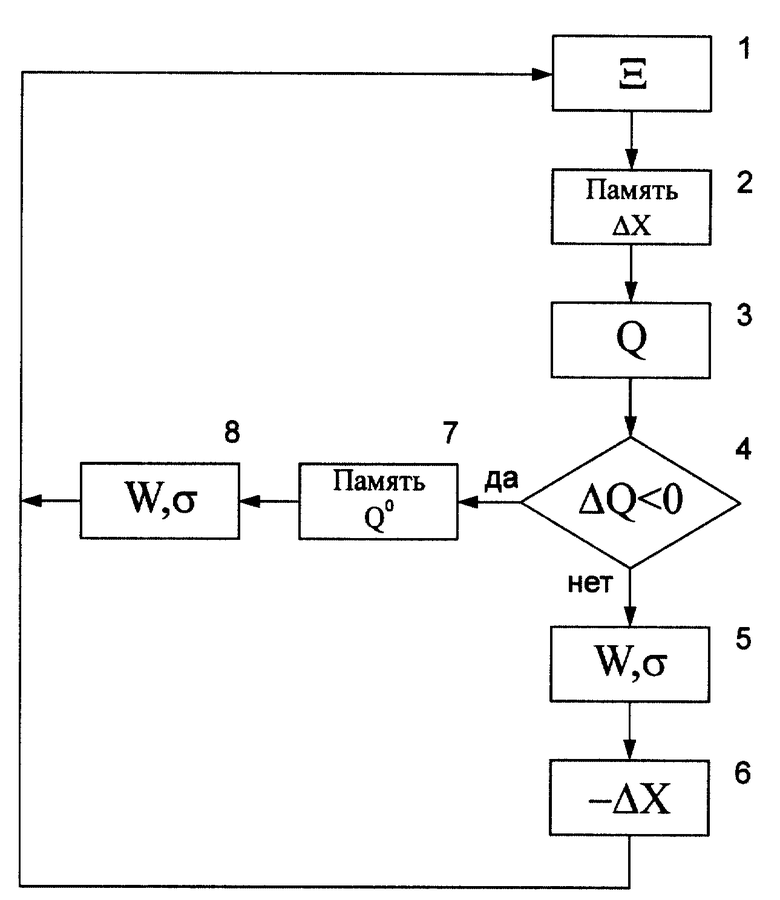
Способ автоматической настройки многопараметрических систем автоматического управления на оптимальные условия путем создания режима адаптивного случайного поиска в пространстве оптимизируемых параметров, основанный на формировании случайных входных шаговых воздействий на объект управления, математическое ожидание которых автоматически адаптируют на основе знака приращения функции качества объекта управления в соответствии с соотношением
Wi+1 = kWi-δΔQiΔXi,
где W - математическое ожидание равномерно распределенных случайных шагов;
k - коэффициент запоминания;
δ - параметр скорости самообучения;
Q - функция качества;
Х - состояние объекта в пространстве оптимизируемых параметров,
отличающийся тем, что для формирования случайных входных шаговых воздействий используют нормальное распределение, среднее квадратическое отклонение автоматически адаптируют на основе знака приращения функции качества объекта управления в соответствии с выражением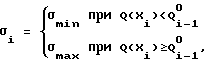
где σi - текущая величина среднего квадратического отклонения;
σmin - минимальное значение среднего квадратического отклонения;
σmax - максимальное значение среднего квадратического отклонения;
Qi-1 0 - наименьшее значение функции качества за предыдущие шаги поиска.
| РАСТРИГИН Л.А | |||
| Адаптация сложных систем | |||
| - Рига: Зинатне, 1981, с | |||
| Шланговое соединение | 0 |
|
SU88A1 |
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
| МНОГОКАНАЛЬНЫЙ СТАТИСТИЧЕСКИЙ ОПТИМИЗАТОР | 0 |
|
SU326550A1 |
| Оптимизатор | 1974 |
|
SU514270A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| РАСТРИГИН Л.А | |||
| Системы экстремального управления | |||
| - М.: Наука, 1974, с | |||
| Стрелочный контрольный замок | 1924 |
|
SU422A1 |
| Способ обмыливания жиров и жирных масел | 1911 |
|
SU500A1 |
