Изобретение относится к колесным безрельсовым мобильным машинам и может быть использовано на автомобилях, колесных тракторах, дорожных и сельскохозяйственных машинах.
Известен способ [1], в котором при повороте машины плоскости управляемых колес вместе с кузовом наклоняются в сторону центра поворота на одинаковые углы. Недостаток известного способа заключается в том, что при повороте машины наклон плоскостей управляемых колес, движущихся по траекториям различной кривизны, при одинаковом угле наклона их плоскостей не в состоянии обеспечить оптимальный режим качения.
За прототип настоящего изобретения принят способ [2] изменения направления движения колесного транспортного средства, в котором каждое управляемое колесо поворачивают в горизонтальной плоскости и наклоняют в вертикальной плоскости, а наклон (на угол) плоскости управляемых колес радиуса г задается в зависимости от радиуса R поворота транспортного средства
Недостатком указанного способа является то, что в нем дается связь между конструктивным, представляющим угол α и кинематическим, т.е. радиусом поворота R параметрами, что затрудняет его осуществление.
Технический результат в заявляемом изобретении заключается в том, что способ позволяет обеспечить оптимальный режим устойчивого движения по криволинейной траектории при минимальном износе шин и расходе топлива.
Указанный технический результат достигается тем, что в способе поворота колесных безрельсовых мобильных машин, заключающемся в том, что каждое управляемое колесо поворачивают в горизонтальной плоскости и одновременно наклоняют в поперечной плоскости к центру поворота машины, а каждое управляемое колесо наклоняют в поперечной плоскости к центру поворота на угол β, который связан с углом поворота колеса α следующей зависимостью: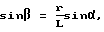
где r - радиус колеса;
L - расстояние от полюса управления мобильной машины до оси, несущей управляемое колесо;
α - угол поворота каждого управляемого колеса;
β - угол наклона каждого управляемого колеса в поперечной плоскости.
Для двухосной машины с одной управляемой осью расстояние L соответствует базе этой машины.
На фиг.1 приведено схематическое изображение в поперечной плоскости управляемых внутреннего 1 и наружного 2 колес одной из осей, которые совершают поворот вокруг точки О радиусами Rв и Rн и имеют наклон к центру поворота соответственно на углы βв и βн.
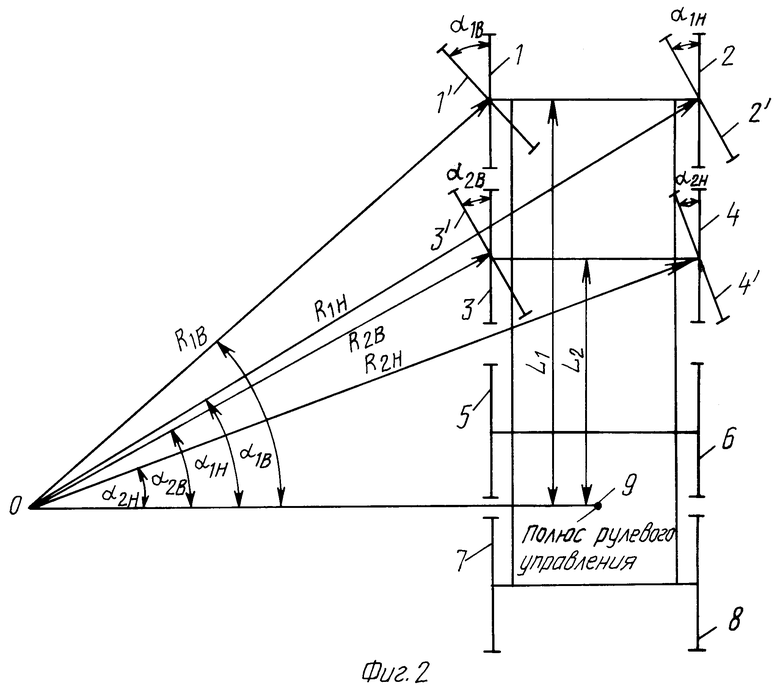
На фиг.2 дан вид в плане схемы четырехосной машины с четырьмя передними управляемыми колесами 1, 2, 3, 4 и неуправляемыми колесами 5, 6, 7, 8 и полюсом управления 9, расположенным между неуправляемыми осями, где L1 и L2 - расстояние от полюса управления до соответствующей оси колес.
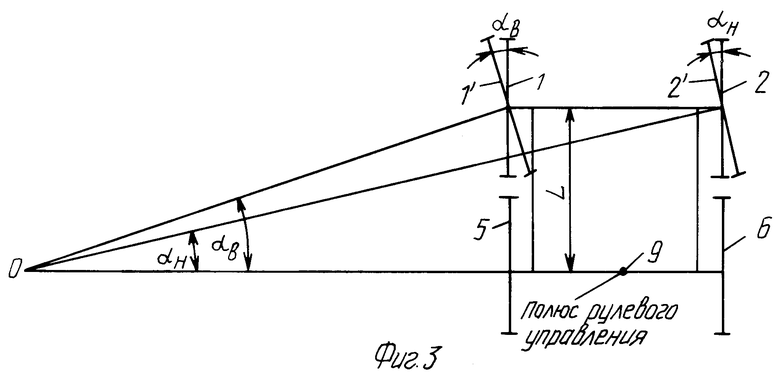
На фиг. 3 приведена в плане схема двухосной машины с двумя управляемыми колесами 1 и 2, двумя неуправляемыми колесами 5 и 6 и полюсом рулевого управления 9, расположенным на оси неуправляемых колес 5 и 6.
Способ поворота колес машины реализуется следующим образом.
Для поворота машины каждое из управляемых колес 1, 2, 3, 4 поворачивают в горизонтальной плоскости на необходимый угол α, определяемый заданной кривизной траектории движения, и одновременно наклоняют в сторону центра поворота в поперечной плоскости на угол β, синус которого связан с синусом угла α зависимостью через отношение радиуса колеса r и положение полюса рулевого управления машины L, а именно
Исследования, проведенные на Центральном автополигоне НАМИ по изучению причин интенсивного неравномерного по ширине беговой дорожки износа шин на автомобилях, эксплуатирующихся на маршрутах, изобилующих частыми поворотами, показали, что основной причиной этого является несоответствие углов поворота и наклона плоскостей управляемых колес при движении автомобиля по криволинейной траектории. В ходе этих исследований было экспериментально установлено, что износ и сопротивление качению шин, а также устойчивость движения автомобиля на повороте могут быть существенно улучшены путем выбора оптимального соответствия бокового и продольного углов наклона шкворневых узлов, от которых зависит соотношение углов поворота и наклона плоскостей управляемых колес при повороте автомобиля. Т.о. предлагаемый способ, как показали экспериментальные исследования, позволяет значительно улучшить указанные выше эксплуатационные характеристики.
Источники информации
1. Патент Великобритании 227047, кл. В 62 Д 9/00, 1984 г.
2. Авторское свидетельство 1240675, кл. В 63 Д 15/00 1986 г.
Изобретение относится к колесным безрельсовым мобильным машинам и может быть использовано на автомобилях, тракторах, дорожных и сельскохозяйственных машинах. Сущность изобретения заключается в способе поворота колесной безрельсовой мобильной машины, управляемые колеса которой при их повороте на угол α одновременно отклоняют в сторону центра поворота на угол β, создавая этим оптимальный режим качения машины по криволинейной траектории. Способ поворота управляемых колес безрельсовой мобильной машины обеспечивает оптимальный режим качения ее управляемых колес по криволинейной траектории, способствуя снижению износа шин и сокращению расхода топлива, а также повышению устойчивости и управляемости машин. 3 ил.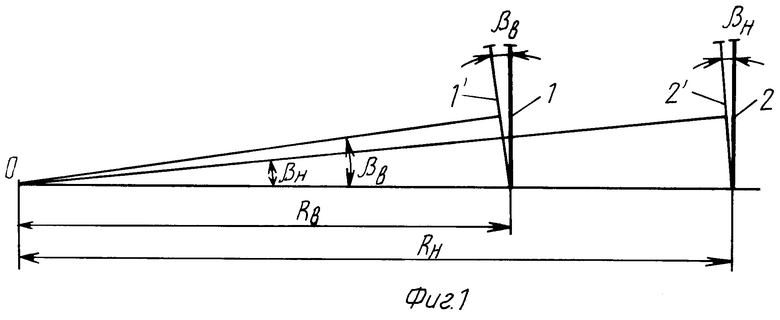
Способ поворота колесных безрельсовых мобильных машин, заключающийся в том, что каждое управляемое колесо поворачивают в горизонтальной плоскости и одновременно наклоняют в поперечной плоскости к центру поворота машин, отличающийся тем, что каждое управляемое колесо наклоняют в поперечной плоскости к центру поворота на угол β, который связан с углом поворота колеса α следующей аналитической зависимостью:
где r - радиус колеса;
L - расстояние от полюса рулевого управления мобильной машины до оси с рассматриваемым управляемым колесом;
α - угол поворота каждого управляемого колеса;
β - угол наклона каждого управляемого колеса в поперечном направлении.
| Способ изменения направления движения колесного транспортного средства | 1983 |
|
SU1240675A1 |
| US 4624469 А, 25.11.1986 | |||
| US 4546997 А, 15.10.1985. | |||

