Изобретение относится к транспортной технике, точнее к ходовым частям наземных безрельсовых транспортных средств, в частности шаговым движителям, и предназначено, преимущественно, для мобильных технологических средств повышенной проходимости, которые могут быть использованы в условиях бездорожья на грунтах с низкой несущей способностью.
Известны шаговые движители, шаг перемещения транспортного средства (ТС) которыми обеспечивается за счет смены положения опор относительно поверхности перемещения и корпуса ТС по линейной двухкоординатной траектории. Так, в движителе по патенту RU 2068362, 1996 г. алгоритм шагового перемещения включает в себя: линейный подъем/опускание опоры, ее линейное горизонтальное перемещение для возврата опоры в исходное положение относительно корпуса ТС и линейное перемещение корпуса относительно поверхности перемещения с синхронизацией всех этих движений между собой, для чего каждая из опор снабжена закрепленными на ней импульсным механизмом ее подъема в виде силового гидроцилиндра с дополнительной инертной массой и силовым горизонтальным гидроцилиндром в качестве механизма продольного перемещения корпуса ТС с пружиной для возврата опоры в исходное положение относительно корпуса. Такое исполнение утяжеляет и усложняет все устройство в целом.
Движитель ТС по патенту RU 2001817, 1991 г. с аналогичным алгоритмом шагового перемещения конструктивно упрощен, по сравнению с первым аналогом, за счет использования общего для опор приводного механизма в виде коленвала, связанного рядом кинематических звеньев с двигателем ТС, и опоры в нем поочередно переносятся кривошипами коленвала по схеме «вверх-вперед - вниз на грунт». Однако функциональные возможности такого движителя ограничены, т.к. шаг перемещения в нем определяется размерами кривошипа и его увеличение невозможно без значительного увеличения габаритов устройства и ТС.
Известен шаговый движитель ТС (RU 2031040, 1995 г.), в котором устранены недостатки предыдущих аналогов, поскольку изменение относительного положения опор в нем осуществляется по криволинейной траектории путем поочередного переноса опор друг перед другом по дуге окружности. Опоры выполнены в виде колес, установленных с заданным промежутком между собой на концах общего водила, выполненного в виде поворотного коромысла с приводом от двигателя ТС и выполняющего роль механизма перестановки опор в согласованном режиме. Такой движитель имеет большие возможности по расширению диапазона шагов, поскольку величина шага складывается из удвоенной величины длины окружности колеса и расстояния между осями колес. К тому же функции перестановки опор и линейного перемещения кузова ТС в нем совмещены в одном механизме. Однако конструктивно этот механизм выполнен еще достаточно сложным, а использование опор в виде вращающихся колес снижает проходимость ТС на грунтах с низкой несущей способностью, ведет к образованию колеи.
Наиболее близким аналогом (прототипом) изобретения является шаговый движитель (RU 2266842, 2005 г.), содержащий полые опоры, поочередно контактирующие с поверхностью перемещения ТС, и выполненный в виде поворотного водила механизм для изменения относительного положения опор и линейного перемещения борта ТС. В нем для повышения проходимости ТС опоры имеют увеличенную контактную наружную поверхность с прямолинейными и криволинейными участками, а водило образовано закольцованными стенками, расположенными внутри этой полой опоры и повторяющими контур ее наружной поверхности. Водило взаимодействует с обеспечением сцепления прямолинейными горизонтальными и боковыми криволинейными участками своей внутренней поверхности с размещенным внутри него приводным колесом, связанным с силовой установкой ТС.
Наличие точечного контакта опоры с поверхностью перемещения (по аналогии с колесной опорой) снижает уровень проходимости ТС, не исключает вероятности его пробуксовки и нарушения поверхностного слоя грунта. Форма опоры, необходимость соотносить ее габариты, в частности ширину, впрямую с массой ТС и наличие дополнительных пассивных опор для обеспечения устойчивости ТС в момент упомянутого точечного контакта обуславливают завышение габаритов и массы ТС, снижают его мобильность.
Из-за принятого в прототипе конструктивного решения опор и наличия как конструктивной, так и функциональной зависимости водила от опоры в силу размещения водила внутри опоры и их жесткой взаимосвязи между собой схема передачи усилий от силовой установки ТС на поворот водила и, соответственно, работа механизма, чередующего положение опор относительно поверхности перемещения, осуществляется с низким КПД.
Перечисленные недостатки снижают эффективность такого движителя, т.к. приводят к увеличению сопротивления движению и повышению энергозатрат на движение.
Задача, решаемая изобретением, направлена на создание компактного, эффективного и экономичного шагового движителя для ТС повышенной проходимости с малыми приведенными к массе ТС энергозатратами, пригодного для работы с передвижением по поверхностям с низкой несущей способностью, в частности по болотам, пескам, глубокому снежному покрову.
Технический результат, получаемый от использования изобретения, состоит в повышении проходимости за счет снижения удельного давления ТС на поверхность перемещения; в снижении энергозатрат на движение путем снижения сопротивления движению и повышения эффективности механизма чередования опор за счет введения в схему его работы движения качения.
Для достижения технического результата в шаговом движителе ТС, содержащем опоры и механизм чередования их положения относительно поверхности перемещения, выполненный в виде поворотного водила, взаимодействующего с обеспечением сцепления горизонтальными прямолинейными и криволинейными торцевыми участками своей внутренней поверхности с размещенным внутри него приводным колесом, связанным с силовой установкой ТС, согласно изобретению опоры выполнены в виде двух поочередно перекатывающихся друг по другу полукатков, снабженных эластичными башмаками, при этом полукатки установлены на противолежащих концах водила с возможностью свободного осевого поворота и с межцентровым расстоянием, обеспечивающим их взаимодействие между собой, при котором наружная цилиндрическая поверхность одного полукатка, опирающегося в этот момент на поверхность перемещения, служит направляющей для перекатывающегося по нему второго полукатка.
Дополнительные отличия заключаются в том, что:
- межцентровое расстояние криволинейных торцевых участков внутренней поверхности водила выполнено большим межцентрового расстояния установки полукатков;
- полукатки по наружным цилиндрическим поверхностям взаимосвязаны средствами осевой фиксации, например в виде элементов замкового соединения;
- полукатки установлены на водиле с помощью жестко закрепленных на нем осей, с которыми полукатки имеют шарнирную связь;
- сцепление приводного колеса и водила обеспечивается за счет насечки или зубчатого зацепления;
- башмаки полукатков выполнены в виде пневмобаллонов.
Сущность изобретения поясняется чертежами, где на фиг.1 дан общий вид предлагаемого движителя (пример); на фиг.2 - то же, в промежуточный момент чередования полукатков; на фиг.3 - то же, по завершении шага движителя; на фиг.4 - разрез АА на фиг.2.
Опора движителя выполнена в виде двух поочередно перекатывающихся друг по другу полукатков 1 и 2 с эластичными башмаками 3 и 4 соответственно, размещенными на горизонтальных участках полукатков, расположенных ниже линии их центров. Механизм чередования положения полукатков 1 и 2 относительно поверхности перемещения выполнен в виде поворотного полого водила 5 и приводного колеса 6, связанного с силовой установкой ТС (на приведенных чертежах не показана) и размещенного внутри водила 5 с обеспечением обкатывания по его внутренней поверхности, образованной горизонтальными прямолинейными участками 7 и боковыми криволинейными участками 8. Контактные поверхности колеса 6 и участков 7 и 8 водила 5 могут быть снабжены элементами, улучшающими сцепление между ними, например, в виде насечки или зубчатого профиля. В частных случаях исполнения устройства в качестве приводного колеса 6 может служить, например, зубчатое колесо, установленное на ведущей оси ТС.
Полукатки 1 и 2 установлены снаружи водила 5 на осях 9, жестко закрепленных на противолежащих концах водила, например, посредством фланцев 10 с расстоянием «Б» между их центрами, обеспечивающим контакт полукатков между собой наружными цилиндрическими поверхностями. С осями 9 полукатки связаны шарнирно, что дает им возможность свободного осевого поворота.
Колесо 6 выполнено с радиусом R, а криволинейные поверхности участков 8 внутренней поверхности водила 5 по торцам водила описаны радиусами R1 аналогичными радиусу R колеса 6, с центрами, расположенными на расстоянии «В», и при переходе в прямолинейные горизонтальные участки 7 радиусами R2, превышающими R1, и с центрами, совпадающими с центрами полукатков.
Расстояние «В» превышает расстояние «Б» на величину 2 «е», которая выбирается из условия обеспечения поворота водила 5 под воздействием упирающегося в его торец вращающегося колеса 6 сначала в вертикальное положение, а затем плавно вниз.
Структура эластичных башмаков 3 и 4, их форма, габариты и место расположения горизонтальных участков на полукатках 1 и 2 для их установки, а также габариты самих полукатков определяются конструктивно, исходя из заданных технических параметров и эксплуатационных характеристик ТС. В конкретном примере исполнения (фиг.1) башмаки выполнены в виде пневмобаллонов, равных по длине параметру горизонтального участка полукатка и по ширине - ширине полукатка, при этом их боковые поверхности выполнены по радиусу, равному радиусу полукатков. Возможно и другое выполнение боковых поверхностей башмаков, например в виде скосов и т.п.
Для осевой фиксации полукатков при их перекатывании друг по другу их наружные цилиндрические поверхности выполнены с необходимыми конструктивными элементами из числа известных, например элементами замкового соединения: выступом 11 на одном полукатке и пазом 12 на другом (фиг.4).
Выполнением движителя в виде двух полукатков, опирающихся на грунт своими эластичными башмаками и перекатывающихся друг по другу с помощью водила 5, которое приводится в движение, когда колесо 6, имеющее привод от силовой установки ТС, занимает крайнее торцевое положение внутри водила и заставляет последнее совершить поворот на 180° с переносом башмака одного из полукатков на шаг в направлении движения ТС, достигается:
- перенос опор движителя в режиме шагового качения при минимальных энергозатратах и максимальной эффективности по тяге;
- снижение сопротивления движению машины;
- реализация в работе движителя принципа «слоновьей поступи», при котором периметр контактной площади находящегося во взаимодействии с грунтом эластичного башмака на протяжении цикла является величиной переменной, благодаря чему снижается давление ТС на поверхность перемещения и снижается усилие, необходимое для извлечения башмака полукатка из грунта при преодолении болотистых или подобных им поверхностей, особенно в условиях значительного погружения в грязевом, песчаном или снежном покрове;
- расширение диапазона функциональных возможностей ТС, т.к. движитель может быть использован и в качестве дополнительного съемного на обычных колесных ТС, имеющих либо бортовую раздачу Мкр, либо систему поворота с применением шарнирно-сочлененной рамы;
- расширение функциональных возможностей самого движителя, т.к. при едином конструктивном исполнении он может быть использован и в качестве ведущего движителя ТС, и в качестве ведомого;
- щадящее (без образования колеи) воздействие ТС на поверхность перемещения, позволяющее осуществлять движение и работу технологической мобильной машины без разрушения поверхности слабых грунтов, сводит к минимуму погружение опор движителя в такие грунты;
- плавность хода ТС - в предлагаемом движителе на протяжении шагового цикла перемещения постоянно сохраняется контакт опоры с поверхностью перемещения, т.е. в нем отсутствует присущая прототипу и другим известным аналогам, прерывистость процесса взаимодействия опоры с грунтом (в прототипе - при переходе на криволинейный торец опоры), когда возникают условия для продавливания грунта и буксования машины;
- исключение или, по крайней мере, многократное снижение вероятности пробуксовки ТС;
- конструктивное упрощение устройства.
Работа устройства поясняется на примере исполнения ведущего движителя, приведенном на фиг 1.
В исходном положении оба полукатка 1 и 2 опираются своими башмаками 3 и 4 на поверхность 13 перемещения ТС. Водило 5 при этом расположено вдоль поверхности 13 и колесо 6 находится в одном из торцов водила 5, например в правом, по месту расположения полукатка 2. Для осуществления движения ТС в направлении справа налево колесу 6 от силовой установки ТС передается Мкр. Вращаясь, колесо 6 за счет предусмотренных на нем и на внутренней поверхности водила 5 элементов сцепления перекатывается по участку 7 от правого торца водила к левому, перемещая влево кузов ТС. При этом практически к нулю сводится вероятность буксования машины, т.к. качение приводного колеса происходит по жесткому опорному основанию - горизонтальным прямолинейным участкам 7 водила, а не по поверхности 13. На поверхность 13 машина опирается эластичными башмаками полукатков, причем заложенным конструктивно уровнем эластичности башмаков решается задача преодоления неровностей поверхности 13.
При достижении вращающимся колесом 6 левого криволинейного участка 8 оно упирается в его торец и благодаря наличию эксцентриситета «е» создается момент силы тяжести ТС, стремящийся переместить водило в вертикальное положение. Водило получает движение поворота - его правый торец описывает дугу относительно центра колеса 6 и увлекает установленный на нем полукаток 2, перемещая его на 90° (фиг.2). Полукаток 2, имея возможность поворота вокруг своей оси за счет шарнирного соединения с осью 9, наружной поверхностью перекатывается при этом по поверхности полукатка 1, которая служит ему направляющей. Далее под действием дополнительного момента с плечом «е», создаваемого силой тяжести водила и полукатка 2, происходит дальнейший поворот водила 5 на следующие 90° плавно вниз до тех пор, пока водило 5 и полукаток 2 не займут положение в соответствии с показанным на фиг.3, соответствующее завершению цикла перемещения ТС на шаг. При этом полукаток 2 приходит в исходное положение относительно поверхности 13, на которую теперь опираются оба полукатка, а колесо 6 находится в правом торце водила, но уже по месту расположения полукатка 1. Таким образом, алгоритм цикла включает в себя поворот водила 5 вокруг оси колеса 6 на 180° и поворот полукатка 2 вокруг своей оси на 360°. Затем цикл повторяется с тем же алгоритмом, но теперь полукаток 1 переносится водилом 5 на шаг, перекатываясь по полукатку 2.
Частотой повторения чередующихся циклов задается скорость перемещения ТС.
Смена направления перемещения ТС задается изменением направления вращения колеса 6.
Предлагаемый движитель отличается компактностью и эффективностью работы по сравнению с традиционными колесными и гусеничными движителями.
Изобретение относится к транспортной технике и предназначено, преимущественно, для мобильных технологических средств повышенной проходимости, которые могут быть использованы в условиях бездорожья на грунтах с низкой несущей способностью. Движитель содержит опоры, выполненные в виде двух поочередно перекатывающихся друг по другу полукатков, снабженных эластичными башмаками. Полукатки установлены на противолежащих концах поворотного полого водила с возможностью свободного осевого поворота. Внутренняя поверхность водила образована прямолинейными горизонтальными участками и торцевыми криволинейными. В водиле размещено приводное колесо, связанное с силовой установкой машины. Приводное колесо, обкатываясь внутри водила по прямолинейным участкам, обеспечивает линейное перемещение машины, а при последующем взаимодействии с одним из торцевых криволинейных участков способствует повороту водила сначала на 90° вверх под действием момента сил тяжести машины и затем на 90° плавно вниз под действием момента силы тяжести водила и полукатка, переносимого водилом. Технический результат заключается в обеспечении плавности хода машины, повышении ее проходимости и снижении сопротивления движению. 5 з.п. ф-лы, 4 ил.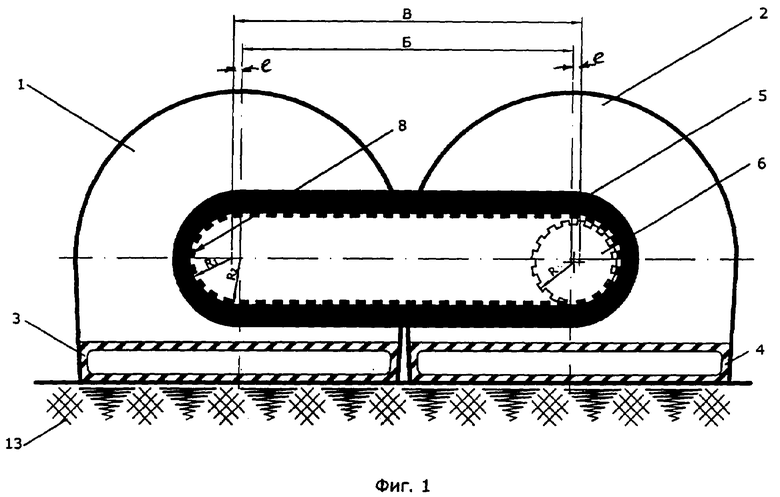
1. Шаговый движитель транспортного средства, содержащий опоры и механизм чередования их положения относительно поверхности перемещения, выполненный в виде поворотного водила, взаимодействующего с обеспечением сцепления прямолинейными горизонтальными и торцевыми криволинейными участками своей внутренней поверхности с размещенным внутри него приводным колесом, связанным с силовой установкой транспортного средства, отличающийся тем, что опоры выполнены в виде двух поочередно перекатывающихся друг по другу полукатков, снабженных эластичными башмаками, полукатки установлены на противолежащих концах водила с возможностью свободного осевого поворота и с межцентровым расстоянием, обеспечивающим их взаимодействие между собой, при котором наружная цилиндрическая поверхность одного полукатка, опирающегося в этот момент на поверхность перемещения, служит направляющей для перекатывающегося по нему второго полукатка.
2. Движитель по п.1, отличающийся тем, что межцентровое расстояние криволинейных торцевых участков внутренней поверхности водила выполнено большим межцентрового расстояния установки полукатков.
3. Движитель по п.1, отличающийся тем, что по наружным цилиндрическим поверхностям полукатки взаимосвязаны средствами осевой фиксации, например в виде элементов замкового соединения.
4. Движитель по п.1, отличающийся тем, что башмаки полукатков выполнены в виде пневмобаллонов.
5. Движитель по п.1, отличающийся тем, что полукатки установлены на водиле с помощью жестко закрепленных на нем осей, с которыми полукатки имеют шарнирную связь.
6. Движитель по п.1, отличающийся тем, что сцепление приводного колеса и водила обеспечивается за счет насечки или зубчатого зацепления.
| Движитель транспортного средства Анопченко В.Г. | 1990 |
|
SU1790936A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2266842C1 |
| US 3061972, 06.11.1962 | |||
| US 3283839, 08.11.1966. | |||

