Од to
Изобретение относится к системам идентификации параметров механических колебаний.
Цель изобретения - повьшение ка- честна оценивания в случае нестационарности объекта наблюдения и расширение области применения.
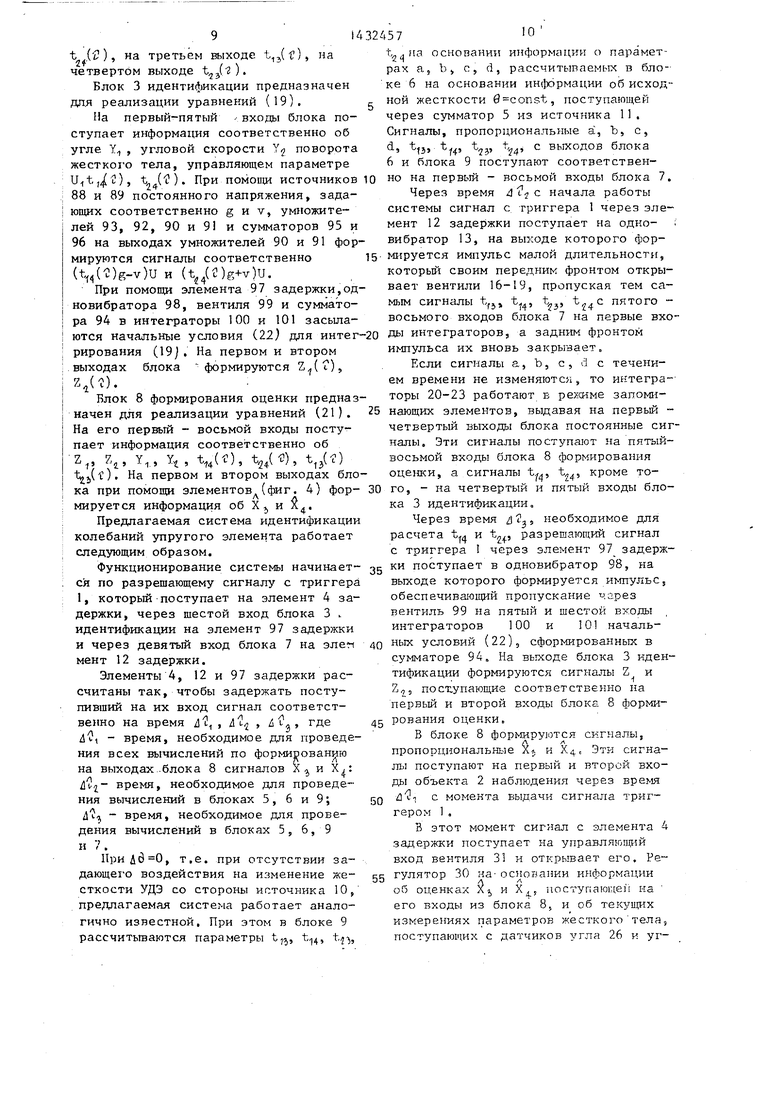
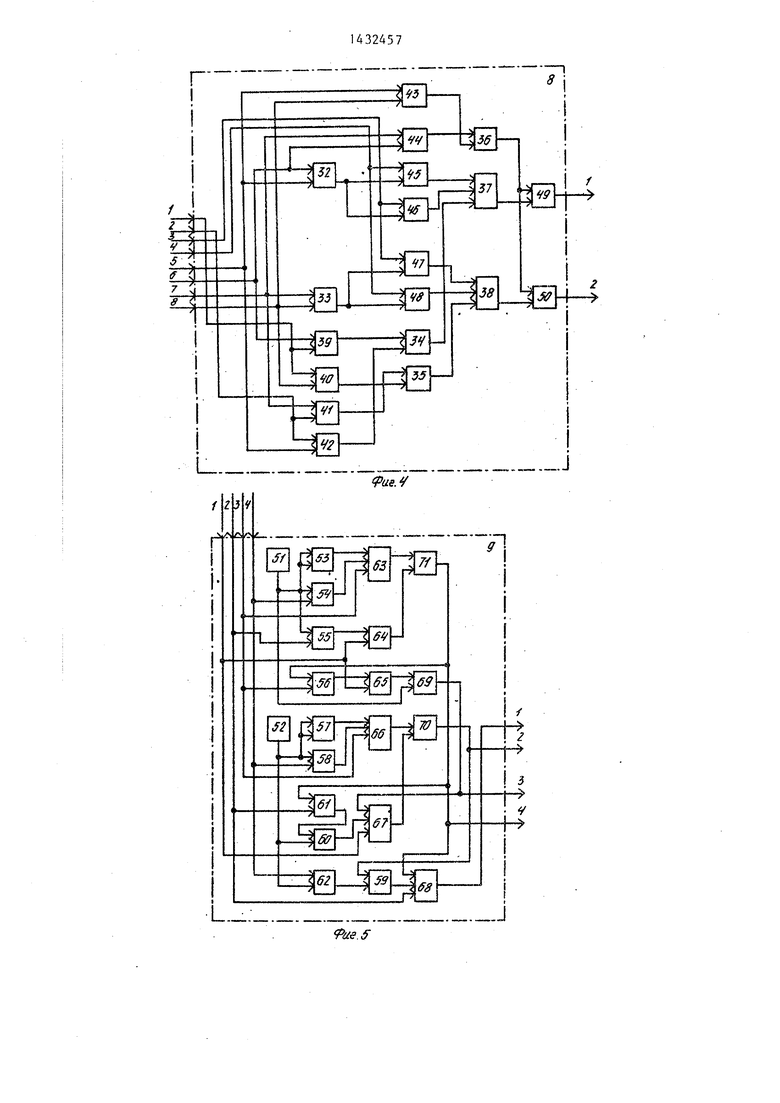
На фиг. Г показана структурная схема системы; на фиг. 2 - блок коррек- ции; на фиг. 3 - объект наблюдения; на фиг, 4 - блок формирования оценки; на фиг. 5 - блок расчета параметров идентификатора; на фиг. 6 - блок расчета коэффициентов модели объекта на- блюдения; на фиг. 7 - блок идентификации.
Система идентификации колебаний присоединенного к объекту упругого элемента переменной жесткости (фиг.О содержит триггер 1, объект 2 наблюдения, блок 3 идентификации, элемент 4 задержки, сумматор 5, блок 6 расчета коэффициентов модели объекта наблюдения, блок 7 коррекции парамет- ров идентификатора, блок 8 формирования оценки, блок 9 расчета параметров идентификатора, источник 10 задающего воздействия, источник 11 по- стбянного напряжения.
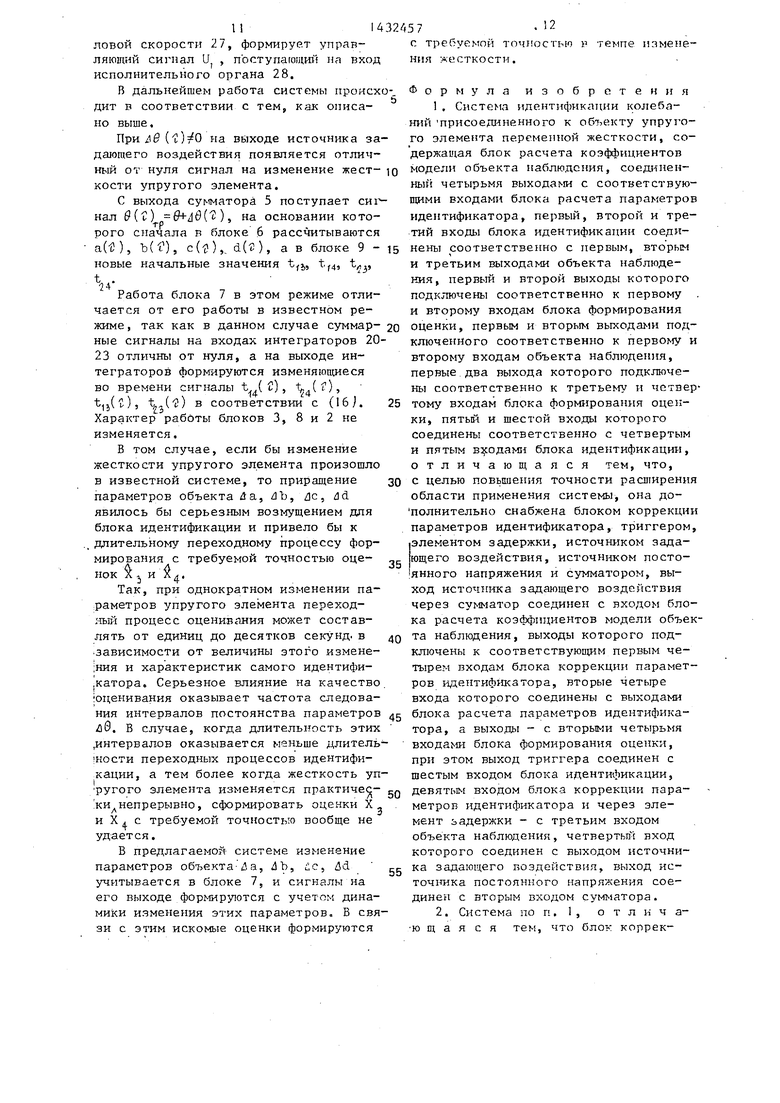
Блок 7 коррекции параметров идентификатора (фиг. 2) содержит элемент 12 задержки, одновибратор 13 дервый 14 и второй 15 умножители, первый 16 второй 17, третий 18 и четвертый 19 вен- тили, первый 20, второй 21, третий 22 интеграторы с инвертируюп1ими первым и вторым входами, четвертый 23 интегратор с инвертирующими вторым и третьим входами.
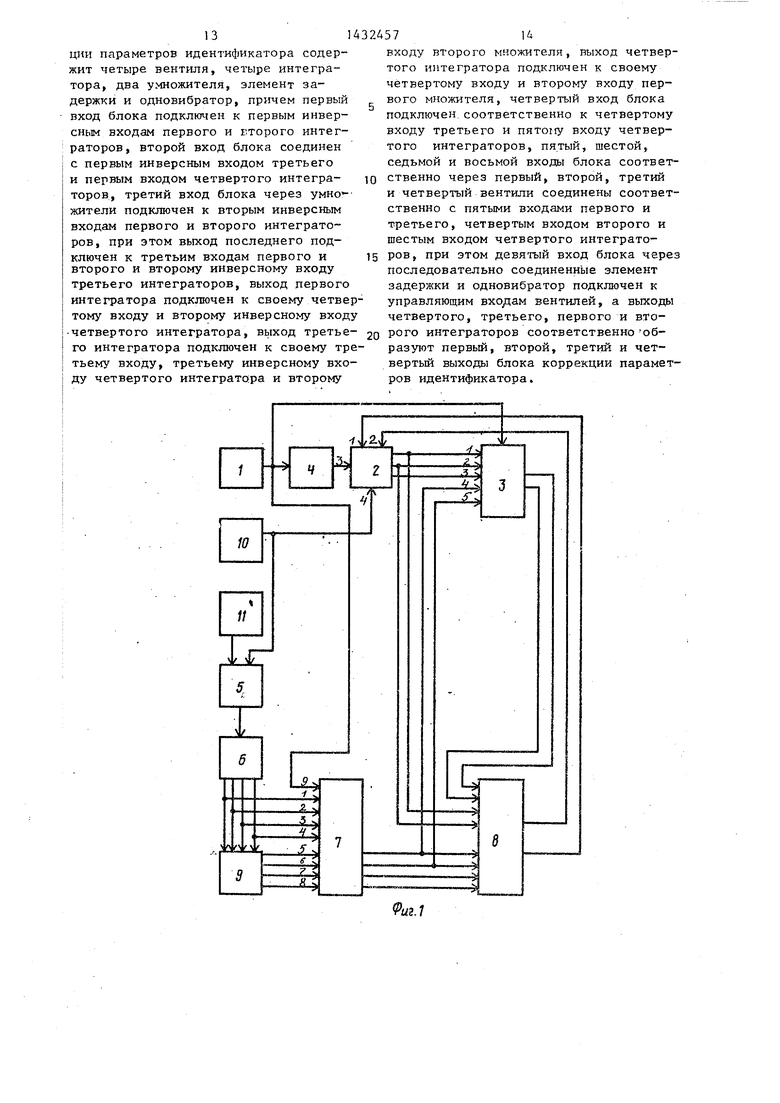
Объект 2 наблюдения (фиг. 3) со- дерясит объект 24 (как жесткое тело), присоединенный упругий элемент 25, датчик 26 угла, датчик 27 угловой скорости, исполнительный орган 28 управ- ления объектом, исполнительный орган 29 управления упругим элементом, регулятор 30 и вентиль 31.
Блок 8 формирования оценки (фиг.4) содержит сумматоры 32-33, 34-38, причем у сумматоров 34-36 вторые входы инвертирующие, а у сумматоров 37, 38 первые входы инвертирую1цие, умножители 39-48, делители 49 и 50.
Клок 9 расчета параметров иденти- фикатора (фиг. 5)содержит источники 51 и 52 постоянного напряжения, умножители 53-58, 59 и 60, сумматоры 61, 62-68, пр11чем у сумматоров 61,66,67,
Q15
20 2530
ьс 40
.с
, 50
55
572
68 и 62 первые входы инвертирующие, а у сумматора 63 второй и третий входы инвертирующие, делители 69-71 .
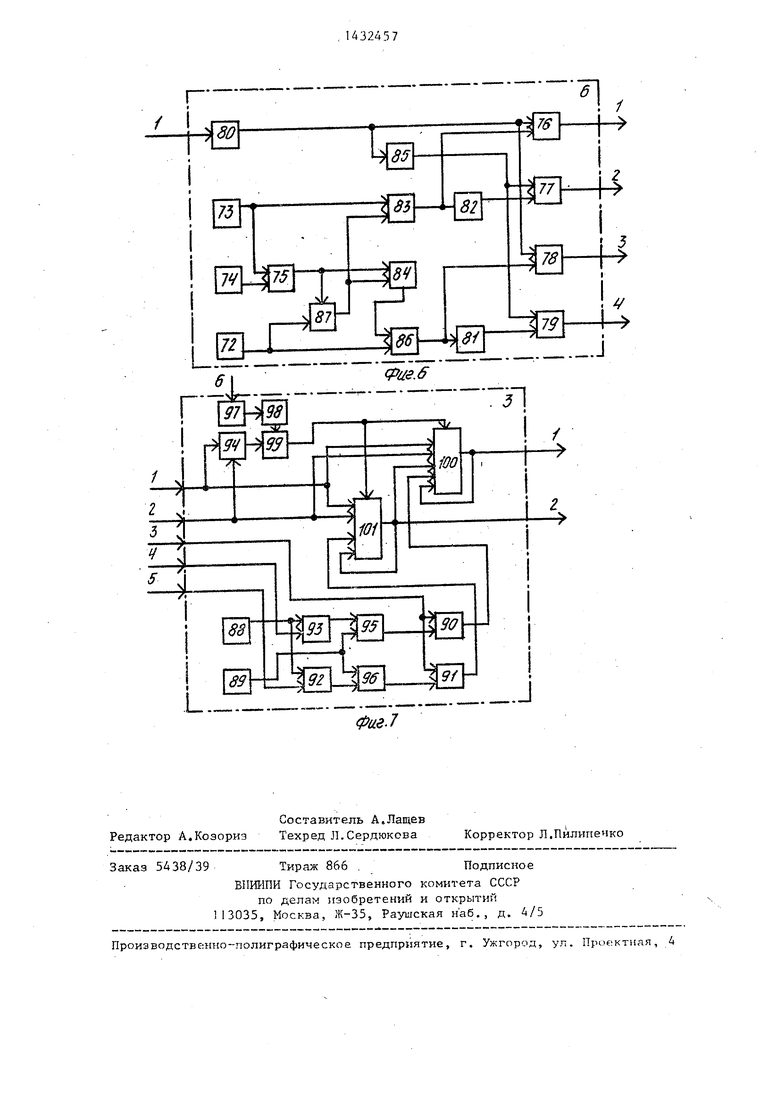
Влок 6 расчета коэффициентов модели объекта наблюдения (фиг, 6) со- дерясит источники 72-74 постоянного напряжения, умножители 75, 76-79 усилители 72, 80-82, делители 83 и 84, нелинейный элемент 85, сумматоры 86 и 87, причем у сумматора 86 первый вход инвертирующий.
Блок 3 идентификации (фиг. 7) содержит: источники 88 и 89 постоянного напряжения, умножители 90-93, сумматоры 91-96, прш-тем первые два с инвертирующими вторыми входами, элемент 97 задержки, одновибратор 98, вентиль 99, интеграторы 100 и 10, причем первый и пятый входы интегратора 100 имеют коэффициент усиления соответственно (А, +1) и Д,, а второй, третий и шестой его входы инвертирующие, пер- вьш, второй и четвертый входы интег- ратора 101 имеют коэффициенты усиления соответственно Д,, ()
кроме того, первый вход также является инвертирующим.
Система работает следующим.образом.
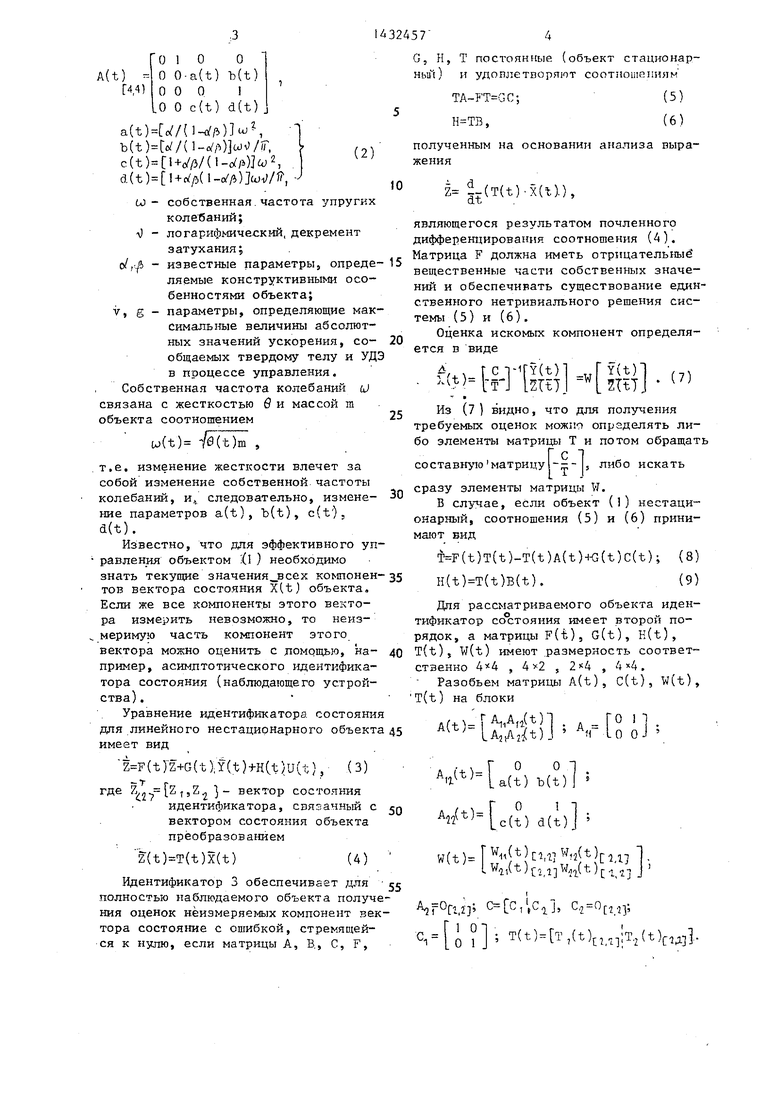
Рассмотрим объект состоящий из твердого тела с присоединенным упругоде- формируемым элементом переменной жесткости, у которого измерению поддаются лишь параметры твердого тела (угол поворота и угловая скорость поворота твердого тела), а доопределению подлежат параметры элег-гента (ве- . личина отклонения и скорость отклонения от положения равновесия).
Движение данного объекта можно описать векторным линейным дифференциальным уравнением четвертого порядК И
(t)X+B(t)U(t), jJ
Y(t)CX(t),
где ,Х25Хэ, вектор состояния объекта;
, Хл - соответственно угол и угловая скорость движения твердого тела ,
18 4 отклонение и скорость отклонения от положения равновесия;
5Y i:,Yo j ., ,Х о - вектор выходных (измеряемых) параметров объекта.
С
2.4
Г 1 О О О 1 г, т- , t: л п 1
Г1о 1 О oJ 4 s- O.sl
0
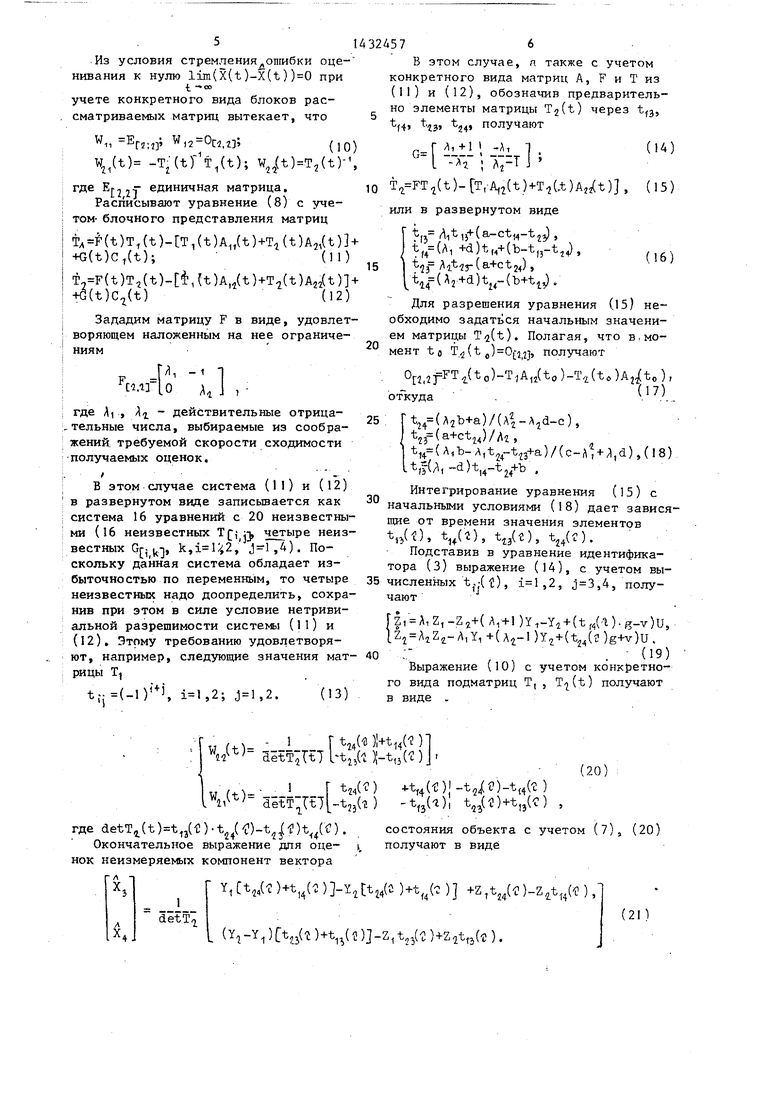
A(t) - 4,4)
0 O-a(t) b(t)
000 I
.0 0 c(t) d(t).
a(t)//( l-4//b)uj b(t)tc//(Uc/л)ы)//Г, c(t)ClV/3/()a;2, с1(1) 1 + с//5(), CO- собственная, частота упругих
колебаний; л) - логарифмический, декремент
затухания;
о1 ,,fi - известные параметры, опреде- 15 ляемые конструктивными особенностями объекта; V, g - параметры, определяющие максимальные величины абсолютных значений ускорения, со- 20 общаемых твердому телу и УДЭ в процессе управления. Собственная частота колебаний (J вязана с жесткостью б и массой m бъекта соотношением25
G, 1, Т постоянные (объект стационар- Hbut) и удовлетворяют соотношениям
(5)
TA-FT GC; ,
(6)
15 2025
10
полученным на основании анализа выражения
Z g-(T(t).X(t).),
являющегося результатом почленного дифференцирования соотношения (). Матрица F должна иметь отрицательные вещественные части собственных значений и обеспечивать существование единственного нетривиального решения системы (5) и (6).
Оценка искомых компонент определяется в виде
г/4. rcrirY(t)l -.rY(t) | f.
Ш1 ImTj
f
Из (7) видно, что для получения требуемых оценок можло определять либо элементы матрицы Т и потом обращать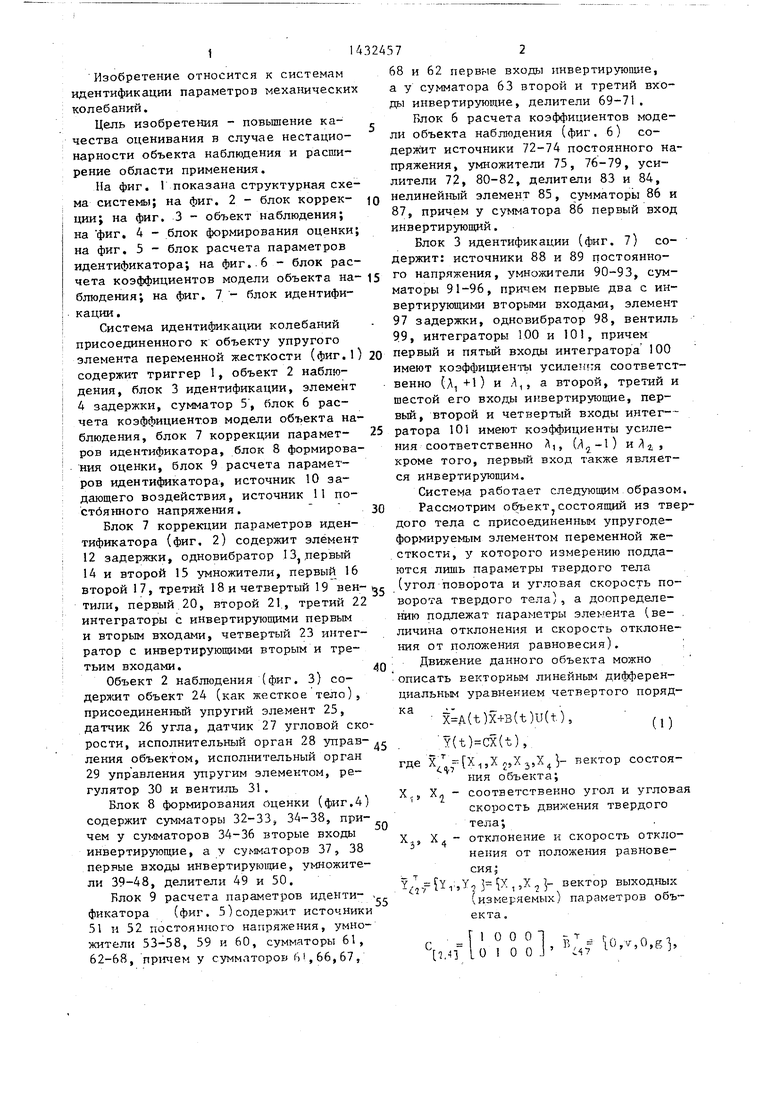
| название | год | авторы | номер документа |
|---|---|---|---|
| Система идентификации колебаний присоединенного к объекту упругого элемента с дискретно изменяемой жесткостью | 1988 |
|
SU1543384A1 |
| Система идентификации параметров линейных объектов | 1988 |
|
SU1534429A1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НЕСТАЦИОНАРНОГО ОБЪЕКТА С ПЕРЕМЕННЫМ ЗАПАЗДЫВАНИЕМ | 1990 |
|
RU2027214C1 |
| Идентификатор параметров стохастического динамического объекта | 1984 |
|
SU1255991A1 |
| Адаптивный идентификатор | 1989 |
|
SU1670674A1 |
| Идентификатор параметров и состояния систем управления | 1981 |
|
SU962863A1 |
| Устройство для идентификации параметров объекта | 1980 |
|
SU898388A1 |
| ДИСКРЕТНАЯ СИСТЕМА ОЦЕНИВАНИЯ | 2007 |
|
RU2398258C2 |
| Коррелятор | 1991 |
|
SU1798803A1 |
| Адаптивное фильтрующее устройство | 1987 |
|
SU1436271A1 |
Изобретение относится к системам идентификации параметров механических колебаний упругодеформируемых элементов. Целью изобретения является повышение качества оценивания в случае нестационарности объекта наблюдения и расширение области применения. С этой целью система, содержащая блок расчета коэффициентов модели объекта наблюдения, блок расчета параметров идентификатора, собственно объект наблюдения, блок идентификации и блок формирования оценки, дополнительно снабжена блоком коррекции параметров идентификатора, триггером, эл.5ментом задержки, источником задающего воздействия, источником постоянного напряжения и сумматором. 1 з.п. ф-лы, 7 нл. с s
т.е. изменение жесткости влечет за собой изменение собственной частоты колебаний, и следовательно, измене- кие параметров a(t), b(t), c{t }, d(t).
Известно, что для эффективного управления объектом ( ) необходимо знать текущие значения всех компонен- тов вектора состояния X(t) объекта. Если же все компоненты этого ра измерить невозможно, то неизмеримую часть компонент этого вектора можно оценить с домрщью, на- пример, асимптотического идентификатора состояния (наблюдающего устройства) .
Уравнение идентификатора состояния для линейного нестационарного объекта имеет вид
(t) Z+G(t);y(t)tH(t)U(t), (3)
sT
где Z.,Z, вектор сое
тояния
идентификатора, связанный с д вектором состояния объекта преобразованием
l(t)T(t)x(t)
Идентификатор 3 обеспечивает для ее полностью наблюдаемого объекта получения оценок нёиэмеряемых компонент вектора состояние с ошибкой, стремящейся к нулю, если матрицы А, В., С, F,
(4) . .
составн ю матрицу
LC.I
I Т I
либо искать
сразу элементы матрицы Vf.
В слзг-чае, если объект (l) нестационарный, соотношения (5) и (6) принимают вид
(t)T(t)-T(t)A(t)(t)c(t); (8) H(t):T(t)B(t).(9)
Для рассматриваемого объекта идентификатор состояния имеет второй порядок, а матрицы F(t)5 G(t), H(t), T(t), (t) имеют размерность соответственно , 4 2 , 24 , 4 4.
Разобьем матрицы A(t), C(t), W(t), T(t) на блоки
A(t) . д fO . UatAz t). U oJ
a(t)b()
1г
A2(t) г
0 1 1 . c(t) d(t)J
н(г),г,2(г),;д; 1, (t)ci,(t)-i Д J
) Ci ()-/2 j
t
Г ГгдЗ 1 z C z/i
C, J J ; т(t)зtт,(t),,.,(tV,д...
Из условия стремления опгибки оценивания к нулю lim(X(t)-X(t))0 при
t-oo
учете конкретного вида блоков рассматриваемых матриц вытекает, что
,
(10)
-Г 1 .
(trt,(t); W,(t)T2(t)-
В этом случае, я т конкретного вида матр (II) и (12), обозначи но элементы матрицы T t,4 tj3 tj, получают
Q:r I ; . i .
где единичная матрица.
Расписывают уравнение (8) с учетом- блочного представления матриц
(t)T,(t),(t))+T(t)A2,(t) + +G(t)C,(t); (II)
(t)T,(t)-,(t)A,,j(t)+T.j(t)A2i(t) + +G(t)C(t)(12)
Зададим матрицу F в виде, удовлетворяющем наложенным на нее ограничениям
F -t - 1
А J , 25
30
где Д, , Д - действительные отрица- тельные числа, выбираемые из сообраений требуемой скорости сходимости получаемых оценок.
В этом случае система (II) и (12) в развернутом виде записьшается как система 16 уравнений с 20 неизвестныи (16 неизвестных четыре неизвестных G. ц., k,, ,4). Поскольку данная система обладает избыточностью по переменным, то четыре неизвестных надо доопределить, сохранив при этом в силе условие нетривиальной разрешимости системы (П) и (12). Этому требованию удовлетворяют, например, следующие значения мат- 40
35
рицы Т
tf. (-) , ,2; j l,2.
(13)
,. ,, V - 1 r4(U)l+ti4( J)
dStfirtlbMi t jCs) г t,,(i:
(l
(20)
Wjt)
i.u(} t,4(f)j-t2/p)-t(4( i:) ) -Vi)l V(i),3(c) ,
где detT(t)t,j(i))-t2()-t.)t(C) . состояния объекта с учетом (7), (20)
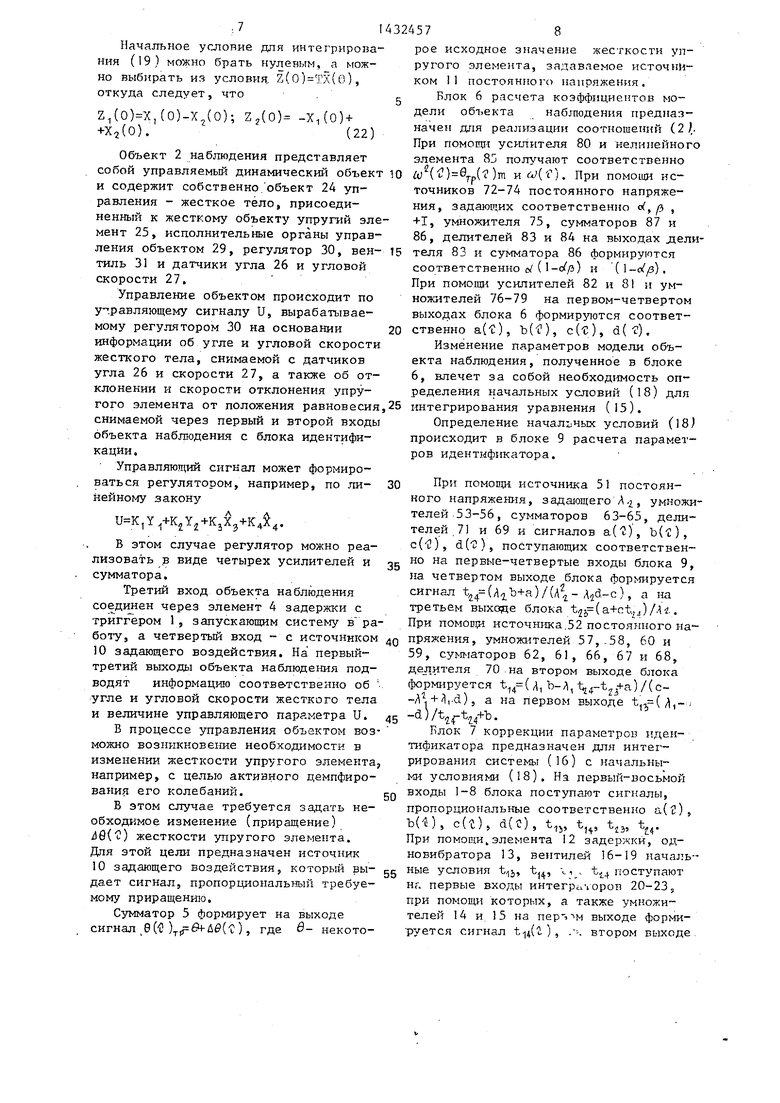
Окончательное выражение дпя оце- получают в виде нок неизмеряемых компонент вектора
л - 3
1
detT
YiCt,,(O+t,()(2 )+t,(-: ) +Z,t,( C),/) ()(t)+t()J-Z,t,5( 2)+Z.it,3(l).
-Г 1 .
В этом случае, я также с учетом конкретного вида матриц А, F и Т из (II) и (12), обозначив предварительно элементы матрицы T2(t) через t,3, t,4 tj3 tj, получают
Q:r I ; . i .()
,}+(a-ct,4-tj,), t,(, +d)t,,+ (b-t,,-t,, ;.t75-(a+ct24), 44(2+d)(b+ti,).
(6;
Для разрешения уравнения (15) необходимо задаться начальным значением матрицы T/2(t). Полагая, что в,мо- мент tfl i (t j), получают
0,-2,(to)-T.,A,i(to)-T,i(),
(17)
откуда
25
30
40
t(A2b+a)/(A|-A,d-c), t(a+ct)/Ai,
t,(A,b-A,,,3+a)/(c-A, + ,d),(l8) t,f(, d)t,-t,,+b .
Интегрирование уравнения (l5) с начальными условиями (I8) дает зависящие от времени значения элементов
t() W«).
Подставив в уравнение идентификатора (3) выражение (14), с учетом вы- 35 численных t.-(i;), ,2, j 3,4, получают
Z, A,Z,-Z2+( Ai + )Y,-yi + (t,4( i)-g-v)U, lZj AjZj-A,Y,+(Ai-l)Y2+(t (t))g+v)U.
, . (19) Выражение 10) с учетом конкретного вида подматриц Т,, T(t) получают в виде .
(20)
(21)
1432457
для интегрированулевым, а можя, Z(0)TX(o),
рое руг ком
дел нач При
ZjO)-X,(0)-X(0); Z(0) -Xi(o) +
+Х2(0).
(22)
Объект 2 наблюдения представляет
элемента 85 получают соответственно ( (
собой управляемый динамический объект ю io ( )( )ni и(Г). При помощи ис- и содержит собственно объект 2Д управления - жесткое тело, присоединенный к жесткому объекту упругий элемент 25, исполнительные органы управгр
точников 72-74 постоянного напряжения, задаюп их соответственно of,/3 , +1, умножителя 75, сумматоров 87 и 86, делителей 83 и 84 на выходах де
ления объектом 29, регулятор 30, вен- 15 теля 83 и сумматора 86 формируются
тиль 31 и датчики угла 26 и угловой скорости 27.
Управление объектом происходит по у.равляющему сигналу U, вырабатываемому регулятором 30 на основании информации об угле и угловой скорости жесткого тела, снимаемой с датчиков угла 26 и скорости 27, а также об отклонении и скорости отклонения упрусоответственно с/(1-с//э) и (), При помощи усилителей 82 и 81 и умножителей 76-79 на первом-четвертом выходах блока 6 формирзтотся соответ- 20 ственно а( С), b(-t ), с(-С), й(-г,
Изменение параметров модели объекта наблюдения, полученное в блоке 6, влечет за собой необход11мость определения начальных условий (18) для
гого элемента от положения равновесия,25 интегрирования уравнения (15), снимаемой через первый и второй входы Определение начальных условий (18) объекта наблюдения с блока идентификации.
Управляющий сигнал может формироваться регулятором, например, по ли- 30
происходит в блоке 9 расчета параметров идентификатора.
При помопц источника 51 постоянного напряжения, задающего Д. , умножи телей 53-56, сумматоров 63-65, делителей 71 и 69 и сигналов а ( 2), b(i:), с(), d( 2), поступающих соответственнейному закону
,Y +K Y2+KjX3+K 4В этом случае регулятор можно реализовать .в виде четырех усилителей и 35 ° первые-четвертые входы блока 9, сумматора. и четвертом выходе блока формируется
сигнал t()/(Л -Ajd-c), а на
сигнал t()/(Л -Ajd-c), а на
45
Третий вход объекта наблюдения
соединен через элемент 4 задержки с третьем выхсзде блока Ц(а+с1..,}/.i., триггером 1, запускающим систему в ра- При помопщ источника.52 постоя шого на- бочу, а четвертый вход - с источником о пряжения, умножителей 57,.58, 60 и 10 задающего воздействия. На первый- 59, сумматоров 62, 61, 66, 67 и 68,
дел.ителя 70 на втором выходе блока с юрмируется t( Д, b-;i, ,(c- .), а на первом выходе t,v(,-, -d).
Блок 7 коррекции параметров идентификатора предназначен для интегрирования системы (16) с начальны- VII условиями (18), На первь1й-восьмой входы 1-8 блока поступают сигналы, пропорциональные соответственно uit} ., b(i, с(г d(c), t,5, t,, t,3, t.. При помопш.элемента 12 задержки, од- новибратора 13, вентилей 16-19 началь- 10 задающего воздействия, который вы- gg ные условия , t,, г,, t поступают дает сигнал, пропорциональный требуе- нг. первые входы интеграчоров 20-23j мому приращению.при помощи которых, а также умножиСумматор 5 формирует на выходе телей 14 и 15 на пер-ч м выходе форми- сигнал 8( i )ff 64-ue ( t), где в- некото- руется сигнал , .-, втором выходе.
третий выходы объекта наблюдения подводят информацию соотве-тственно об угле и угловой скорости жесткого тела и величине управляющего параметра U,
В процессе управления объектом воз- MOJKHO возникновение нeoбxoдIiмocти в изменении жесткости упругого элемента, например, с целью активного демпфирования его колебаний,
Б этом случае требуется за,цать не- обходршое изменение (приращение) Лб( с ) жесткости упругого элемента. Для этой цели предназначен источник
50
8
рое исходное значение жесткости упругого элеме}1та, задаваемое источником 11 постоянного напряжения.
Блок 6 расчета коэффициентов модели объекта набхподения предназначен для реализации соотношений (2/. При ноногщг усилителя 80 и нелинейного
элемента 85 получают соответственно ( (
io ( )( )ni и(Г). При помощи ис-
гр
точников 72-74 постоянного напряжения, задаюп их соответственно of,/3 , +1, умножителя 75, сумматоров 87 и 86, делителей 83 и 84 на выходах делисоответственно с/(1-с//э) и (), При помощи усилителей 82 и 81 и умножителей 76-79 на первом-четвертом выходах блока 6 формирзтотся соответ- ственно а( С), b(-t ), с(-С), й(-г,
Изменение параметров модели объекта наблюдения, полученное в блоке 6, влечет за собой необход11мость определения начальных условий (18) для
интегрирования уравнения (15), Определение начальных условий (18)
интегрирования уравнения (15), Определение начальных условий (18)
происходит в блоке 9 расчета параметров идентификатора.
При помопц источника 51 постоянного напряжения, задающего Д. , умножителей 53-56, сумматоров 63-65, делителей 71 и 69 и сигналов а ( 2), b(i:), с(), d( 2), поступающих соответствен ° первые-четвертые входы блока и четвертом выходе блока формирует
сигнал t()/(Л -Ajd-c), а на
третьем выхсзде блока Ц(а+с1..,}/.i., При помопщ источника.52 постоя шого пряжения, умножителей 57,.58, 60 и 59, сумматоров 62, 61, 66, 67 и 68,
45
gg
t { t), на третьем выходе ), четвертом выходе
t,3().
Блок 3 идентификации предназначен для реализации уравнений (19). g
Па первый-пятый входы блока поступает информация соответственно об угле Y , угловой скорости Yj поворота жесткого тела, управляющем параметре ,2), t (). При помощи источников 10 88 и 89 постоянного напряжения, задающих соответственно g и v, умножителей 93, 92, 90 и 9 и сумматоров 95 и 96 на выходах умножителей 90 и 91 формируются сигналы соответственно 15 (( 2)g-v)U и ((ng+v)U.
При помощи элемента 97 аадержки,од- новибратора 98, вентиля 99 и сумматора 94 в интеграторы 100 и 101 засылаI432A57 О
на т,,2 л па основании информации о параметрах а, Ь с, d, рассчитываемых в блоке 6 на основании ин(юрмации об исходной жесткости 9 const, поступающей через сумматор 5 из источника 11. Сигналы, пропорциональные а, Ъ, с, d, t,j, t, , с выходов блока 6 и блока 9 поступают соответственно на первый - восьмой входы блока 7.
Через время / t с начала работы системы сигнал с, триггера 1 через элемент 12 задержки поступает на одно- ; вибратор 13, На выходе которого формируется импульс малой длительности, которьш своим передник фронтом открывает вентили 16-19, пропуская тем самым сигналы t,j tj, t,,, 74 пятого на первые вхоt3 24 восьмого входов блока 7
ются начальные условия (22) для интег-20 Д интеграторов, а задним фронтом рирования (19). На первом и втором импульса их вновь закрывает. выходах блока -формируются ), Если сигналы а, Ъ, с, d с течени2.( г).
Блок 8 формирования оценки предназначен для реализации уравнений (21). На его первый - восьмой входы поступает информация соответственно об
t,3(0
ем времени не изменяются, то интеграторы 20-23 работают в ре :снме sanoMii- 25 нающих элементов, вьщавая на первьй - четвертый выходы блока постоянные сигналы. Эти сигналы поступают на пятый- восьмой входы блока 8 формирования оценки, а сигналы t.,, t, кроме того, - на четвертый и пятый входы блока 3 идентификации.
Через время необходимое для расчета t и t,,, разрешающий сигнал с триггера I через элемент 97 задержZ, Z, Y,., Y., , V(f), t2,(-C), ( C). Ha первом и втором выходах блока при помощи элементов(фиг. 4) фор- 30 мируется информация об X,, и ,
Предлагаемая система идентификации колебаний упругого элемента работает следующим образом.
Функционирование системы начинает- 35 поступает в одновибратор 98, на ся по разрешающему сигналу с триггера выходе которого формируе7 ся импульс, 1, который-поступает на элемент 4 за- обеспечивающий пропускание чарез держки, через щестой вход блока 3 идентификации на элемент 97 задержки и через девятый вход блока 7 на элем 40 мент 12 задержки.
Элементы 4, 12 и 97 задержки рассчитаны так, чтобы задержать поступивший на их вход сигнал соответственно на время lH, , Л 2 , где
4, 3
время, необходимое для проведения всех вычислений по формированию на выходах..блока 8 сигналов л и d Jj- время, необходимое для проведения вычислений в блоках 5, 6 и 9; Л - время, необходимое для проведения вычислений в блоках 5, 6, 9 и 7.
11риДб 0, т.е. при отсутствии задающего воздействия на изменение жесткости УДЭ со стороны источника 10, предлагаемая система работает аналогично известной. При этом в блоке 9 рассчитьгааются параметры t,,,, t, ,,
вентиль 99 на пятый и шестой входы интеграторов 100 и 101 начальных условий (22)э сформированных в сумматоре 94, На выходе блока 3 идентификации формируются сигналы Z и Z,5 поступающие соответственно на первый и второй входы блока 8 форми- 45 рования оценки.
В блоке 8 формируются сигналы, пропорциональные Xj и Х. Эти сигналы поступают на первый и второй входы объекта 2 наблюдения через время 5Q , с момента выдачи сигнала триггером 1 .
В этот момент сигнал с элемента 4 задержки поступает на управляюп1;ий вход вентиля 3 и открывает его. Расе гулятор 30 на-основании информации
JOлл
об оценках X«, и 11ОС гупаю1ие1 1 на его входы из блока 8, и об текущих измерениях параметров жесткого тела, поступаю1цих с датчиков угла 26 и угЧерез время / t с начала р системы сигнал с, триггера 1 ч мент 12 задержки поступает на вибратор 13, На выходе которо мируется импульс малой длител которьш своим передник фронто вает вентили 16-19, пропуская мым сигналы t,j tj, t,,, 74
на пе
t3 24 восьмого входов блока 7
ем времени не изменяются, то интеграторы 20-23 работают в ре :снме sanoMii- нающих элементов, вьщавая на первьй - етвертый выходы блока постоянные сигналы. Эти сигналы поступают на пятый- восьмой входы блока 8 формирования оценки, а сигналы t.,, t, кроме того, - на четвертый и пятый входы блока 3 идентификации.
Через время необходимое для расчета t и t,,, разрешающий сигнал с триггера I через элемент 97 задерж
поступает в одновибратор 98, на выходе которого формируе7 ся импульс, обеспечивающий пропускание чарез
вентиль 99 на пятый и шестой входы интеграторов 100 и 101 начальных условий (22)э сформированных в сумматоре 94, На выходе блока 3 идентификации формируются сигналы Z и Z,5 поступающие соответственно на первый и второй входы блока 8 форми- рования оценки.
В блоке 8 формируются сигналы, пропорциональные Xj и Х. Эти сигналы поступают на первый и второй входы объекта 2 наблюдения через время , с момента выдачи сигнала триггером 1 .
В этот момент сигнал с элемента 4 задержки поступает на управляюп1;ий вход вентиля 3 и открывает его. Рагулятор 30 на-основании информации
лл
об оценках X«, и 11ОС гупаю1ие1 1 на его входы из блока 8, и об текущих измерениях параметров жесткого тела, поступаю1цих с датчиков угла 26 и угn143 У(5;
ловой скорости 27, формирует управляющий сигнал Uj , поступающий на вход исполнительного органа 28.
В дальнейшем работа системы происхо-. дит в соответствии с тем, как описано выше,
При 5б (И) на выходе источника за- дшотего воздействия появляется отличный от нуля сигнал на изменение жест- ю кости упругого элемента.
С выхода сумматора 5 поступает си1 нал &( (}, на основании которого сначала в блоке 6 рассчитываются
12
с требуемой точгюстыо v темпе изменения жесткости.
Формула изобретения
24
Работа блока 7 в этом режиме отличается от его работы в известном реподключены соответственно к первому и второму входам блока формирования
жиме, так как в данном случае суммар- 20 оценки, первым и вторым выходами подные сигналы на входах интеграторов 20- 23 отличны от нуля, а на выходе интеграторов формируются изменяющиеся
во времени сигналы t (С),
(),
t,j(i;), t ( 2) в соответствии с (16J Характер работы блоков 3, 8 и 2 не изменяется.
В том случае, если бы изменение жесткости упругого элемента произошло в известной системе, то приращение параметров объекта da, ЛЪ, Лс, d явилось бы серьезным воз1-5ущением для блока идентификации и привело бы к ., длительному переходному процессу формирования с требуемой точностью оценок л и л .
Так, при однократном изменении параметров упругого элемента переход- яый процесс оценивания может составлять от единиц до десятков сетсунд. в зависимости от величины этого измене- ;ния и характеристик самого идентифи- .катора. Серьезное влияние на качество
ключенного соответственно к первому и второму входам объекта наблюдения, первые два выхода которого подключены соответственно к тpeтьe y и четвер25 тому входам блока формирования оценки, пятьй и шестой входы которого соединены соответственно с четвертым и пятым В2 одам11 блока идеьгтификации, отличающаяся тем, что,
30 с целью повьппения точности расширения области применения системы, она до- полнительно снабжена блоком коррекции параметров идентификатора, триггером, элементом задержки, источником задающего воздействия, источником постоянного напряжения и сумматором, выход источника задающего воздействия через сумматор соединен с входом блока расчета коэффициентов модели объек40 та наблюдения, выходы которого подключены к соответствуюп им первым четырем входам блока коррекции параметров идентификатора, вторые четьфе входа которого соединены с выходами
35
40 та наблюдения, выходы которого подключены к соответствуюп им первым че тырем входам блока коррекции параме ров идентификатора, вторые четьфе входа которого соединены с выходами
оценивания оказывает частота следования интервалов постоянства параметров jg блока расчета параметров идентифика Л0. Б случае, когда длительность этих тора, а выходы - с вторьми четырьмя ,интервалов оказывается меньше длитель- входами блока формирования оценки, 1НОСТИ переходных процессов идентификации, а тем более когда жесткость уп- ругого элемента изменяется практичес- д- ки непрерывно, сформировать оценки X,. . и X . с требуемой точностью вообще не
удается
В предлагаемой системе изменение параметров объекта-Л а, ЛЬ, йс, dd учитывается в блоке 7, и сигналы на его выходе фop rиpyютcя с учетом динамики изменения этих параметров. Б связи с этим искомые оценки формируются
55
при этом выход триггера соединен с шестым входом блока идентификации, девятым входом блока коррекции пара метров идентификатора и через элемент задержки - с третьим входом объекта наблюдения, четвертьп вход которого соединен с выходом источни ка задающего воздействия, выход ис- точ1тика постоянного напряжения соединен с вторым входом сумматора.
с требуемой точгюстыо v темпе изменения жесткости.
Формула изобретения
ключенного соответственно к первому и второму входам объекта наблюдения, первые два выхода которого подключены соответственно к тpeтьe y и четвертому входам блока формирования оценки, пятьй и шестой входы которого соединены соответственно с четвертым и пятым В2 одам11 блока идеьгтификации, отличающаяся тем, что,
с целью повьппения точности расширения области применения системы, она до- полнительно снабжена блоком коррекции параметров идентификатора, триггером, элементом задержки, источником задающего воздействия, источником постоянного напряжения и сумматором, выход источника задающего воздействия через сумматор соединен с входом блока расчета коэффициентов модели объекта наблюдения, выходы которого подключены к соответствуюп им первым четырем входам блока коррекции параметров идентификатора, вторые четьфе входа которого соединены с выходами
блока расчета параметров идентифика тора, а выходы - с вторьми четырьмя входами блока формирования оценки,
блока расчета параметров идентифика тора, а выходы - с вторьми четырьмя входами блока формирования оценки,
при этом выход триггера соединен с шестым входом блока идентификации, девятым входом блока коррекции параметров идентификатора и через элемент задержки - с третьим входом объекта наблюдения, четвертьп вход которого соединен с выходом источника задающего воздействия, выход ис- точ1тика постоянного напряжения соединен с вторым входом сумматора.
третьего интеграторов, выход первого интегратора подключен к своему четвертому входу и второму инверсному входу четвертого интегратора, выход третьего интегратора подключен к своему третьему входу, третьему инверсному входу четвертого интегратора и второму
входу второго множителя, выход четвертого интегратора подключен к своему четвертому входу и второму входу первого множителя, четвертый вход блока подключен соответственно к четвертому входу третьего и пятону входу четвертого интеграторов, пятый, шестой, седьмой и восьмой входы блока соответственно через первый, второй, третий и четвертый вентили соединены соответственно с пятыми входами первого и третьего, четвертым входом второго и шестым входом четвертого интеграторов, при этом девятый вход блока через последовательно соединенные элемент задержки и одновибратор подключен к управляющим вхо/цам вентилей, а выходы четвертого, третьего, первого и второго интеграторов соответственно образуют первый, второй, третий и чет- вертьй выходы блока коррекции параметров идентификатора.
(ffiie.6
Фи.г.7
| Синяков А.Н | |||
| Системы управления упругими подвижными объектами | |||
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Кузовков Н.Т | |||
| Модальное управление и наблюдающие устройства, М.: Машиностроение, 1976, с | |||
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1983 |
|
SU1129585A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
