Изобретение относится к системам автоматического управления объектами с неопределенными параметрами, а именно к классу адаптивных систем управления с эталонной моделью.
Известна система непрямого адаптивного управления, содержащая сумматор, эталонную модель и последовательно соединенные регулятор, объект управления, первый ключ и идентификатор параметров, вход объекта управления через второй ключ подключен ко второму входу идентификатора, первый выход второго подключен к управляющим входам первого и второго ключей [1] (прототип).
К недостаткам прототипа относятся малые точностью запасы устойчивости и длительные переходные процессы, особенно это характерно для нестационарных объектов управления с чистым запаздыванием по входу.
Отличием предложенного технического решения является то, что она содержит задатчик параметров блок памяти и третий ключ, второй выход идентификатора параметров через последовательно соединенные третий ключ, блок памяти и сумматор подключен к первому входу регулятора, выход задатчика параметров соединен со вторым входом сумматора, вход системы через эталонную модель соединен со вторым входом регулятора, а третий выход идентификатора параметров соединен с управляющим входом третьего ключа.
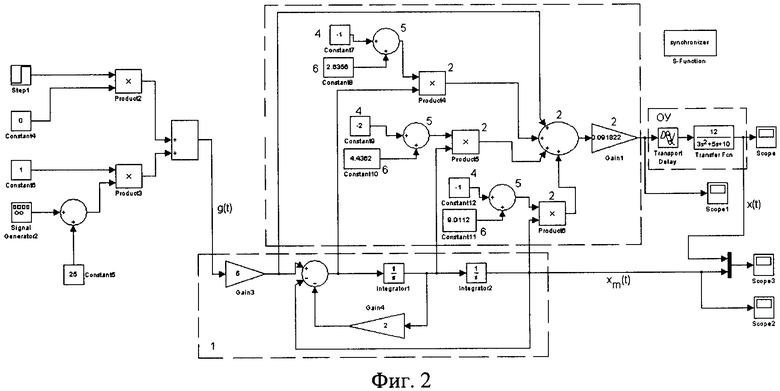
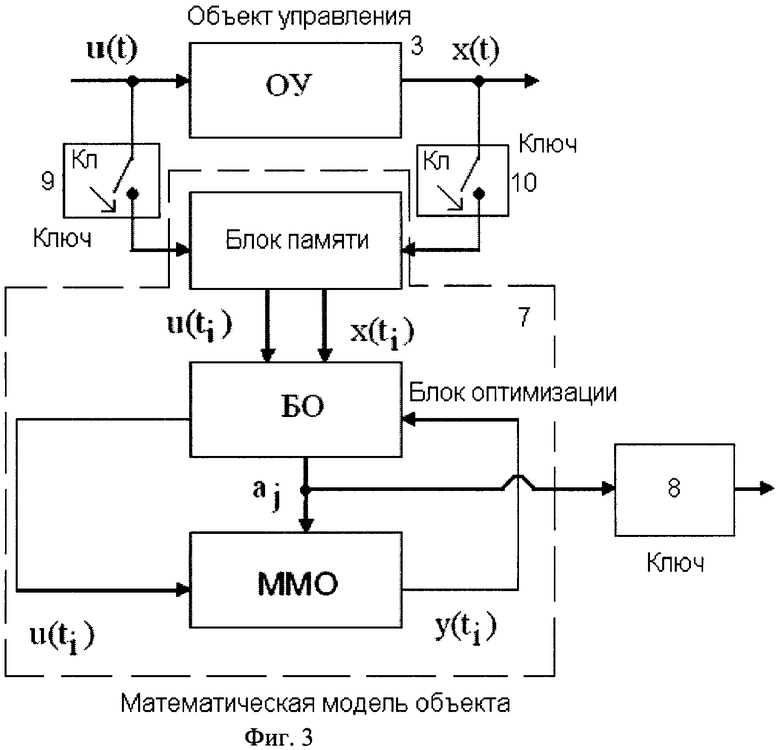
Система непрямого адаптивного управления представлена на фиг.1, на фиг.2 изображена структурная схема основного контура управления (ОКУ) объектом второго порядка, на фиг.3 - функциональная схема идентификатора параметров, на фиг.4 - графики, поясняющие работу идентификатора параметров, на фиг.5 - блок-схема алгоритма оптимизации параметров регулятора ОКУ, на фиг.6 - структурная схема настраиваемой математической модели объекта управления, на фиг.7 - фрагменты выходов объекта управления x(t) и настраиваемой модели хн(t), на фиг.8 - реакции ОКУ x(t) и эталонной модели xm(t) в процессе идентификации параметров, на фиг.9 - реакции xm(t) и x(t) на один и тот же сигнал задания g(t). На фиг.2 и фиг.6 приняты обозначения пакета Simulink.
На фигурах приняты следующие обозначения: 1 - эталонная модель, 2 - регулятор, 3 - объект управления, 4 - задатчик параметров, 5 - сумматор, 6 - блок памяти, 7 - идентификатор параметров, 8, 9, 10 соответственно третий, второй и первый ключи, g(t) - вход сигнал (задание), хм - выход эталонной модели 1, u - управление, БП - блок памяти, БО - блок оптимизации, ММО - математическая модель объекта.
Под объектом управления (ОУ) будем подразумевать так называемый обобщенный объект управления (ООУ), который при аналоговом исполнении адаптивной системы управления содержит последовательно соединенные исполнительное устройство, собственно ОУ и датчик выходной величины x(t). При цифровой реализации адаптивной системы ООУ представляет из себя последовательное соединение преобразователя «код-аналог», исполнительного устройства, ОУ, датчика x(t) и преобразователя «аналог-код».
Функционирует адаптивная система управления следующим образом (фиг.1). На вход системы поступает сигнал g(t). Регулятором 2 формируется сигнал управления u(t) на основании сигналов xм(t) с выхода эталонной модели 1  , n - порядок дифференциального управления объекта управления) и сигналов с выхода сумматора
, n - порядок дифференциального управления объекта управления) и сигналов с выхода сумматора  . Для объекта управления второго порядка (n=2)
. Для объекта управления второго порядка (n=2)

Синтез контуров идентификации и адаптации основан на использовании поисковой операции по методу Холтона [2, 3], реализованных в виде системы непрямого адаптивного управления с вынесенным идентификатором.
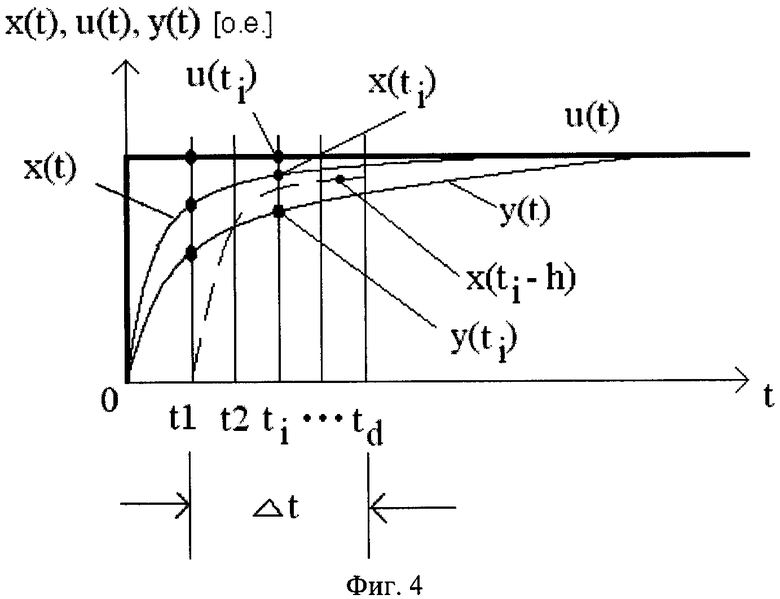
Суть адаптивной системы управления с вынесенным идентификатором показана на фиг.3 и поясняется фиг.4.
Вход и выход ОУ подключают к блоку памяти БП на время Δt. В это время в БП в моменты времени ti∈Δt записывают и запоминают u(ti), x(ti), x(ti-h),  , d - целое число.
, d - целое число.
Затем блоком оптимизации БО осуществляются следующие операции:
- в моменты времени ti на вход математической модели ММО подается входной сигнал u(ti) и фиксируется выход ММО у(ti);
- ищутся разности ε(ti)=x(ti)-y(ti) при определенном наборе вектора параметров аj, установленных в ММО, где вектор параметров a=(а0, а1, …, а1), 1 - количество неизвестных параметров ОУ;
- определяется оценочная функция  для каждого вектора параметров
для каждого вектора параметров
аj;
- с помощью процедуры метода Холтона из известных диапазонов изменения каждого параметра подбирается тот набор параметров, который соответствует равенству I(εi)=min.
управление u(t) имеет вид

Уравнения (1) и (2) однозначно определяют структуру объекта управления 1 и регулятора 2 соответственно. Сигнал управления u(t) поступает на вход объекта управления 3. В результате на выходе объекта управления 3 появляется сигнал x(t), который подвергается действию мультипликативной помехи F(t). Помеха F(t) - влияние среды на параметры объекта управления 3. В уравнении (1) это приводит к нестационарным коэффициентам ai(t), закон изменения которых не известен. Идентификатор параметров 7 определяет параметры объекта управления 3 и через третий ключ 8 передает их в блок памяти 6. С выхода блока памяти 6 на вход сумматора 5 поступает вектор параметров ai(t). На второй вход сумматора 6 подается вектор заданных (желаемых или эталонных) параметров аim. В итоге сигналы Δai(t) получаются в виде Δai(t)= ai(t)-аim. Теперь с учетом значения ai(t) и подстановке u(t) из (2) в уравнение (1) получим уравнение

Дифференциальное уравнение (3) является эталонным (желаемым), его решения определяются его коэффициентами, которые задают вид переходного процесса. Таким образом, уравнение (3) является линейным дифференциальным уравнением эталонной модели 1 и одновременно уравнением основного контура управления, состоящего из регулятора 2 и объекта управления 3 (фиг.2).
Идентификатор параметров 7 имеет функциональную схему фиг.3.
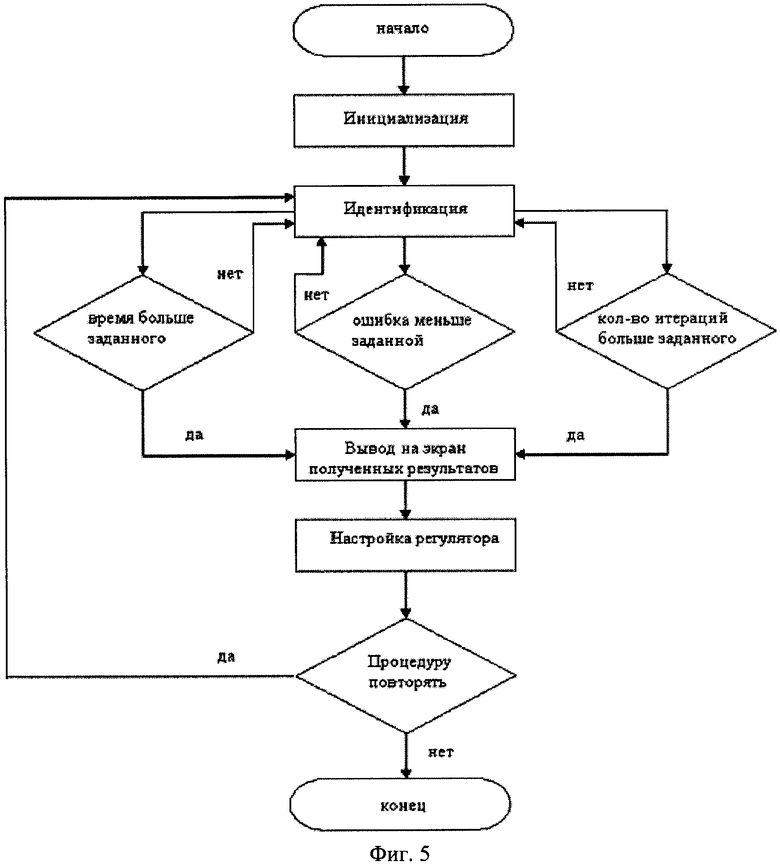
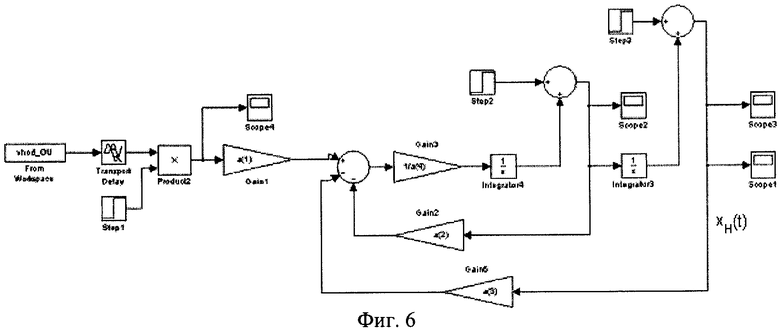
Указанная последовательность действий по определению вектора а aj(t) параметров объекта управления легко реализуется программным путем (или в аналоговом виде). Программа реализует блок-схему фиг.5. При этом используются структурная схема основного контура управления фиг.2 и структурная схема настраиваемой модели фиг.6, которая совпадает со структурной схемой объекта с точностью до коэффициентов их дифференциальных уравнений. Структурные схемы фиг.2 и фиг.6 набираются в Simulink'e Matlab'a.
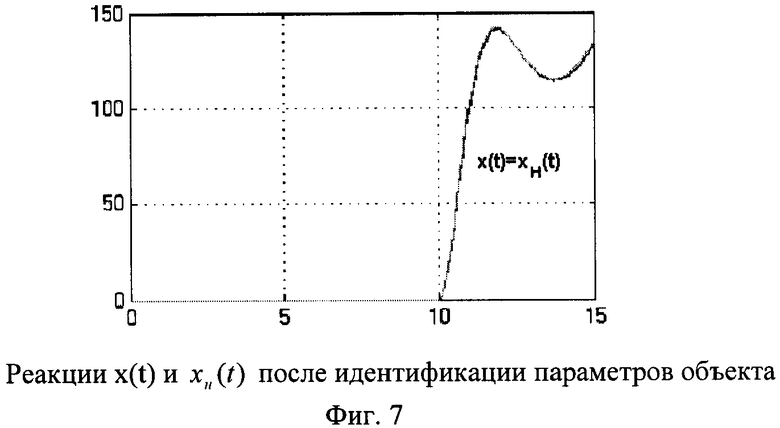
Процедура идентификации параметров объекта происходит согласно алгоритму идентификации, как это отображено на фиг.5. На фиг.7 изображены фрагменты выходов настраиваемой модели ММО хн(t) и объекта x(t), которые, как и ожидалось, совпали во времени при найденных параметрах объекта.
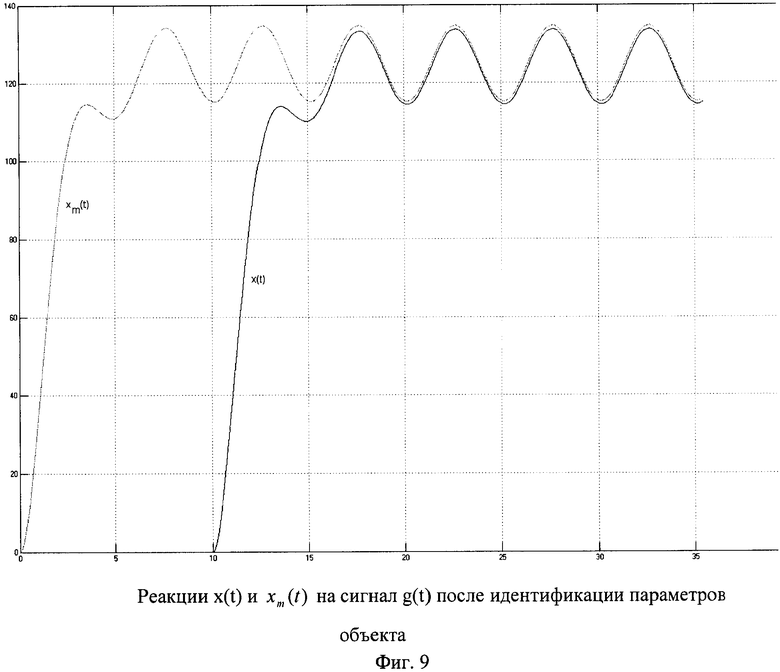
На фиг.8 отображен отрезок времени, начиная с 10 сек по 30 сек, в течение которого параметры идентифицируются. На этом интервале (пока параметры объекта не определены и не установлены в регулятор) выходы x(t)≠xm(t). Начиная с 30 сек, если параметры объекта не меняются, то реакция выхода основного контура управления x(t) будет запаздывать по отношению к заданию g(t) на время чистого запаздывания h=10 сек (в рассматриваемом случае), как это следует из графиков фиг.9.
Если учесть, что в системе-прототипе запаздывание выхода x(t) относительно сигнала задания g(t) колеблется в пределах (5÷6)h, а при больших значениях h система может стать неустойчивой даже при устойчивом объекте, то преимущества предложенной системы становятся очевидными. Система обеспечивает указанные качества при любых чистых запаздываниях по входному воздействию.
Изобретательский уровень предложенного технического решения подтверждается введением блока памяти 6, задатчика параметров 4 и третьего ключа 8, которые в сочетании с эталонной моделью 1 позволяют в регуляторе 2 формировать управление u(t), в котором производные выходного сигнала x(t) объекта управления могут быть заменены точными производными, полученными из модели. При этом точные производные с выхода эталонной модели легко получить любого порядка. Дополнительное достоинство в системе получается путем использования идентификатора параметров 7, который совместно с отличительными признаками системы позволяет построить систему адаптивного управления, в которой процедуры идентификации вынесены из динамики работы основного контура управления (регулятор 2 + объект управления 3).
Литература
1. Лащев А.Я. Система адаптивного управления технологическим процессом производства бутилкаучука. || Приборы и системы. Управление, контроль, диагностика. 2006. №8 с.1-7 (прототип).
2. Медынский М.М., Антоний Е.В. Численные методы нелинейной оптимизации: алгоритмы и программы. МАИ, 2003.
3. Лащев А.Я., Мирзоян Л.А. Об одном способе идентификации параметров объекта управления // Труды XIII Международного НТС «Современные технологии в задачах управления, автоматики и обработки информации», г.Алушта. 2003.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРЯМОГО АДАПТИВНОГО УПРАВЛЕНИЯ | 2007 |
|
RU2367991C2 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НЕСТАЦИОНАРНОГО ОБЪЕКТА С ПЕРЕМЕННЫМ ЗАПАЗДЫВАНИЕМ | 1990 |
|
RU2027214C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| АДАПТИВНАЯ НЕЛИНЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2027212C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ С ЭТАЛОННОЙ МОДЕЛЬЮ | 1990 |
|
RU2027211C1 |
| Система управления | 1991 |
|
SU1792539A3 |
| Система адаптивного управления | 1991 |
|
SU1807446A1 |
| Система идентификации параметров | 1990 |
|
SU1837260A1 |
| Самонастраивающаяся система управления с эталонной моделью | 1990 |
|
SU1827664A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПО УГЛУ ТАНГАЖА | 2010 |
|
RU2445671C2 |

Изобретение относится к области систем адаптивного управления с эталонной моделью. Технический результат - повышение запасов устойчивости системы управления и точности. Отличием системы управления является то, что она содержит задатчик параметров, блок памяти и третий ключ, что позволяет в сочетании с эталонной моделью формировать управление в соответствии с точными производными, полученными из модели, а использование идентификатора параметров позволяет вынести процессы идентификации из динамики работы основного контура управления. 9 ил.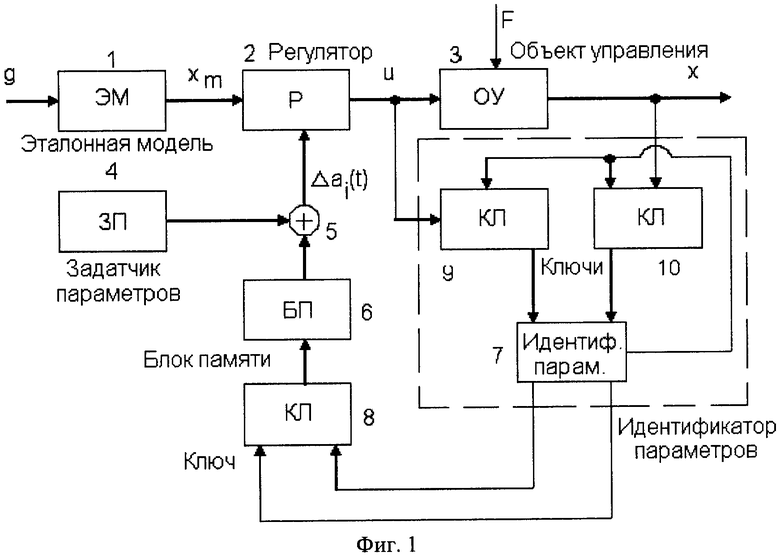
Система непрямого адаптивного управления, содержащая сумматор, эталонную модель и последовательно соединенные регулятор, объект управления, первый ключ и идентификатор параметров, вход объекта управления через второй ключ подключен ко второму входу идентификатора, первый выход которого подключен к управляющим входам первого и второго ключей, отличающаяся тем, что она содержит задатчик параметров, блок памяти и третий ключ, второй выход идентификатора параметров через последовательно соединенные третий ключ, блок памяти и сумматор подключен к первому входу регулятора, выход задатчика параметров соединен со вторым входом сумматора, вход системы через эталонную модель соединен со вторым входом регулятора, а третий выход идентификатора параметров соединен с управляющим входом третьего ключа.

