Изобретение относится к расфасовочноупаковочному оборудованию, в частности к устройствам для раскрытия клапанов коробок.
Известно устройство для раскрытия клапанов коробок, содержащее захваты, связанные с приводом рычажными механизмами 1.
Недостаткам данного устройства является низкая производительность из-за невозможности полного исключения ручного труда.
Наиболее близким к предлагаемому является устройство для раскрытия клапанов коробок, содержащее захваты, кинематически связанные с приводными валами 1.
Однако известное устройство обладает сравнительно малой надежностью в работе, так как обеспечивает раскрытие клапанов, расположенных только в вертикальном положении.
Цель изобретения - повыщение надежности работы путем обеспечения раскрытия клапанов коробок независимо от их положения, а также обеспечение ориентации укладки.
Поставленная цель достигается тем, что устройство для раскрытия клапанов коробок, содержащее захваты, кинематически связанные с приводными валами, снабжено двумя дополнительными захватами, установленными попарно симметрично имеющимся, при этом основные и дополнительные захваты выполнены рычажными и шарнирно соединены с двухзвенными кривощипными механизмами, а на каждом приводном валу установлено зубчатое колесо, причем кинематическая связь каждого захвата с приводным валом осуществлена посредством одного из звеньев двухзвенного кривошипного механизма, на котором жестко закреплено зубчатое колесо, входящее в зацепление с зубчатым колесом приводного вала, а другое звено кривощипного механизма щарнирно установлено в подвижной рамке, жестко связанной с приводной кареткой, расположенной в установленных с возможностью вертикального перемещения направляющих и выполненных в виде рамы направляющих, привод вращения валов осуществлен от силового цилиндра через реечную и конические передачи, при этом каретка и захваты оснащены датчиками их конечных положений.
Причем на одном из приводных валов установлен кулачок, контактирующий с датчиками конечных положений захватов.
Кроме того, устройство снабжено шарнирно закрепленными на подвижной рамке направляющими, каждая из которых имеет ролики, опирающиеся на одно из звеньев кривошипного механизма.
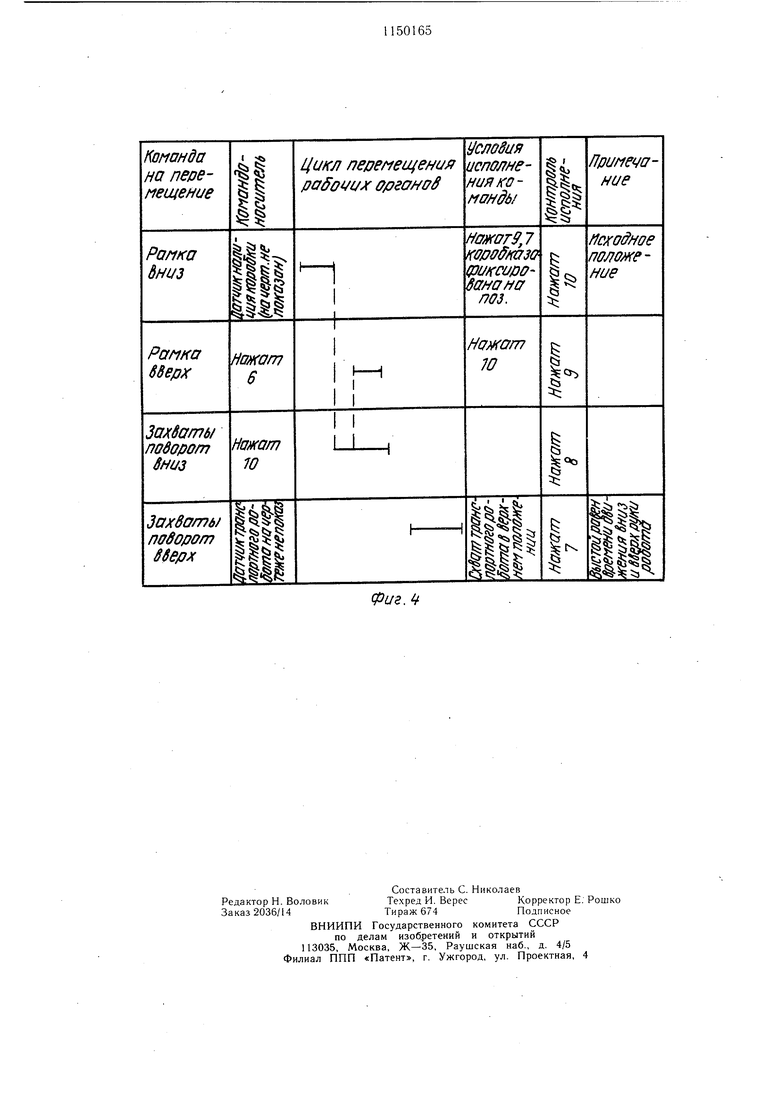
На фиг. 1 изображена кинематическая схема устройства для раскрытия клапанов коробок; на фиг. 2 - то же, траектория движения захватов при раскрывании клапанов; на фиг. 3 - то же, циклограмма работы устройства; на фиг. 4 - то же, момент раскрытия захватами клапанов коробки.
Устройство для раскрытия клапанов коробок 1 состоит из четырех приспособлений для раскрытия клапанов, кинематически связанных с приводными валами 2-5, привода и датчиков конечных положений 6-10.
Каждое приспособление выполнено в виде рычажных захватов 11 -14, при этом захваты 11, 14 и 12, 13 установлены симметрично друг другу и щарнирно связаны с двухзвенными кривошипными механизмами, одни из сторон которых являются ведущими звеньями 15-18, которые жестко соединены с осями зубчатых колес 19-22, взаимодействующих с зубчатыми колесами 0 23-26, размещенных на приводных валах 2-5. Другие стороны двухзвенных кривошипных механизмов являются ведомыми звеньями 27-30 и щарнирно установлены в подвижной рамке 31, которая жестко связана с кареткой 32.
Каретка установлена в направляющих, выполненных в виде подвижной рамы 33, смонтированной на неподвижной раме 34. Привод вертикальных перемещений каретки 32 с рамкой 31 осуществлен от силового цилиндра 35, который получает команду от датчиков 6, 9 и 10 конечных положений.
Привод вращения валов 2-5 осуществлен от силового цилиндра 36 через реечную передачу, включающую рейку 37 и зубчатое колесо 38 и конические передачи с коническими колесами 39-44.
Устройство для раскрытия клапанов коробок снабжено направляющими 45, которые одним концом щарнирно связаны с неподвижной рамкой 31, Направляющие 45 имеют ролики 46, опирающиеся на ведущие 0 звенья 15-18 двухзвенных кривошипных механизмов.
На приводном валу 4 установлен кулачок 47, взаимодействующий с датчиками 6-8 конечных положений.
Привод вертикальных перемещений подвижной рамы 33 осуществлен винтовым механизмом 48.
Устройство работает следующим образом.
При поступлении коробки 1 на позицию загрузки чемодана и ее фиксации силовой цилиндр 35 опускает каретку 32 с рамкой 31, после чего срабатывает датчик 10, и силовой цилиндр 36 перемещает рейку 37 вниз. Зубчатое колесо 38 поворачивается вместе с ведущим валом 2. Через конические зубчатые колеса 39-44 из исходного положения 5 поворачиваются и ведомые валы 3-5.
При этом зубчатые колеса 23-26 передают вращение через соответственно входящие с ними в зацепление зубчатые колеса 19-22 ведущим звеньям 15-18 кривошипного механизма, которые, поворачиваясь на 90°, увлекают за собой ведомые звенья 27-30 и захваты 11 -14, которые при повороте ведущих звеньев на 15° заходят под клапаны коробки 1 и захватывают их.
В этот момент кулачок 47 нажимает датчик 6 силового цилиндра 35, который поднимает каретку 32 с рамкой 31, а так как звенья кривошипного механизма продолжают поворот, то захваты 11 -14 описывают сложную траекторию (фиг. 2), движение по которой позволяет производить полное открывание клапанов коробки 1 и их удержание в открытом положении и исключать возможность контакта захватов 11 -14 со стенками коробки.
После того, как ведущие звенья 15-18 кривощипных механизмов поворачиваются на 90° и каретка 32 с рамкой 31 поднимается, захваты 11 -14 фиксируют клапаны коробки 11 в открытом и отогнутом положении. Во время поворота ведущих звеньев 15-18 кривощипных механизмов вниз, направляющие 45, ролики 46 которых перека/ываются по этим ведущим звеньям 15-18, также поворачиваются вниз до угла наклона.
20 78 П
обеспечивающего предохранение чемодана от смещения при его опускании в коробку 1 погрузочным манипулятором (не показан).
Окончание цикла работы манипулятора контролируется датчиками 7 и 9.
Винтовой механизм 48 служит для перенэладки по высоте на другие типоразмеры коробки, так как устройство обеспечивает открытие клапанов коробок 1 разных размеров по длине и щирине без переналадки.
Предложенное устройство работает при условии
/,,5/3- ,5/,.
Общее передаточное отнощение устройства-2.
Устройство позволяет автоматизировать операцию укладки чемоданов со щвейными машинами, которая в настоящее время производится вручную, на что затраччивается большая доля ручного труда и повышает надежность работы путем обеспечения раскрытия клапанов коробок независимо от их положения.
2125
1В
(Ригл
5

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи пустых и отвода наполненных коробок | 1983 |
|
SU1221065A1 |
| Агрегат для штемпелевки и упаковки стирательных резинок | 1953 |
|
SU119472A2 |
| Устройство для укладки в коробки штучных предметов | 1973 |
|
SU501930A1 |
| Машина набора в рамки растительных ворсовальных шишек | 1959 |
|
SU123935A1 |
| Привод стана холодной прокатки труб | 1983 |
|
SU1152674A1 |
| Двухзвенное транспортное средство | 1981 |
|
SU1044538A2 |
| Устройство для транспортировки листового материала вдоль линии прессов | 1975 |
|
SU555951A1 |
| Машина для печатания тканей сетчатыми шаблонами | 1961 |
|
SU151290A1 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
| Стан холодной прокатки труб | 1986 |
|
SU1419768A1 |

1. УСТРОЙСТВО ДЛЯ РАСКРЫТИЯ КЛАПАНОВ КОРОБОК, содержащее захваты, кинематически связанные с приводными валами, отличающееся тем, что, с целью повышения надежности работы за счет обеспечения раскрытия клапанов коробок независимо от их положения, устройство снабжено двумя дополнительными захватами, установленными попарно симметрично имеющимся, при этом основные и дополнительные захваты выполнены рычажными и шарнирно соединены с двухзвенными кривошипными механизмами, а на каждом приводном валу установлено зубчатое колесо, причем кинематическая связь каждого захвата с приводным валом осуществлена посредством одного из звеньев двухзвенного кривошипного механизма, на котором жестко закреплено зубчатое колесо, входящее в зацепление с зубчатым колесом приводного вала, а другое звено кривошипного механизма шарнирно установлено в подвижной рамке, жестко связанной с приводной кареткой, расположенной в установленных с возможностью вертикального перемещения направляющих, выполненных в виде рамы направляющих, привод вращения валов осуществлен от силового цилиндра через реечную и конические передачи, при этом каретка и захваты оснащены датчиками их конечных положений. 2.Устройство по п. 1, отличающееся i тем, что на одном из приводных валов установлен кулачок, контатирующий с датчи(Л ками конечных положений захватов. 3.Устройство по п. 1, отличающееся тем, что, с целью обеспечения ориентации укладки, оно снабжено щарнирно закрепленными на подвижной рамке направляющими, каждая из которых имеет ролики, опирающиеся на одно из звеньев кривошипного механизма. СП О5 01
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3662516, кл | |||
| Веникодробильный станок | 1921 |
|
SU53A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизм для раскрытия клапанов жестких пачек | 1973 |
|
SU460219A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
