Изобретение относится к области точного приборостроения, преимущественно гироскопического, и может быть использовано при создании гирокомпасов и курсоуказывающих устройств аналитического типа.
Известен способ компенсации скорости дрейфа гироскопа при определении истинного курса с помощью гироскопического датчика угловой скорости (см., например, книгу Б.Н. Назарова и Г.А. Хлебникова "Гиростабилизаторы ракет", М. , 1975, cтp.193-196), согласно которому при гирокомпасировании гироскоп, измерительная ось которого расположена в плоскости горизонта, поворачивают на разные азимутальные углы и снимают на этих углах показания с гироскопа в виде электрического напряжения с эталонного сопротивления, стоящего в цепи обратной связи.
Вследствие того, что ряд моментов гироскопа, не связанный с его корпусом, меняет знак при разворотах его в азимуте, разработаны известные методы, которые позволяют выполнить автокомпенсацию части вредных моментов. Однако эти известные методы автокомпенсации не позволяют полностью исключить погрешность определения курса от дрейфа гироскопа, а также от других источников, например, невыставки осей чувствительности гироскопа в горизонт.
За прототип взят способ аналитической компенсации вредных составляющих угловых скоростей при определении истинного курса с применением гироскопического датчика угловой скорости (см. статью V. L. Budkin, S.P. Redkin "Gyrocompassing on a Movable Object by Means of Angular Rate Sensor on the Basis of Dynamically Tuned Gyro". Second International Symposium on Inertial Technology in Beijing. Beijing, China, October, 1998, pp. 143-151).
В этом способе при гирокомпасировании с применением двухканального гироскопического датчика угловой скорости на наклонном объекте применяют метод аналитической компенсации вредных составляющих угловых скоростей. При гирокомпасировании в условиях наклонного объекта из показаний гироскопического датчика угловой скорости выделяют проекции горизонтальной составляющей угловой скорости вращения Земли на горизонтальные оси, являющиеся проекциями осей, связанных с объектом. В известном способе азимутальный угол неподвижного наклонного объекта определяют с помощью выражения
где
U11, U12 - напряжения с эталонных сопротивлений гироскопа соответственно по первому и второму каналам,
Кн11, Кн12 - крутизна гироскопа по напряжению по первому и второму каналам,
Ω - угловая скорость вращения Земли,
ϕ - широта местоположения объекта,
υ, γ - углы наклона плоскости осей чувствительности гироскопа соответственно по тангажу и крену,
ω
В известном способе при гирокомпасировании аналитически компенсируют в показаниях гироскопа U11, U12 составляющие, обусловленные дрейфом гироскопа ω
При точной компенсации выражение (1) можно представить в виде
ψ = arctg[Ωcosϕsinψ(Ωcosϕcosψ)-1]. (2)
Числитель выражения (2) представляет из себя проекцию горизонтальной составляющей угловой скорости вращения Земли на одну из горизонтальных осей, являющихся проекциями осей, связанных с объектом, а знаменатель - проекцией горизонтальной составляющей угловой скорости вращения Земли на другую ось. Как видно из выражения (2), отношение этих проекций является тангенсом искомого азимутального угла.
Однако, в известном способе компенсация производится с погрешностями, которые обусловлены ошибками задания и измерения: крутизны гироскопа по напряжению, широты местоположения, углов тангажа и крена, модели дрейфа гироскопа, напряжений с эталонных сопротивлений гироскопа.
Выражение для погрешности гирокомпасирования вследствие неточной аналитической компенсации вредных составляющих угловых скоростей при применении датчика угловой скорости на основе динамически настраиваемого гироскопа можно представить в виде
где
Kн11 ΔKн11, Kн12, ΔKн12 - крутизна гироскопа по напряжению и погрешность ее задания по первому и второму каналам,
ω
Ω - угловая скорость вращения Земли,
ϕ, Δϕ - широта местоположения и погрешность ее задания при компенсации,
υ, Δυ - угол наклона объекта по тангажу и погрешность его задания при компенсации,
γ, Δγ - угол наклона объекта по крену и погрешность его задания при компенсации,
ΔU11, ΔU12 - погрешность измерения напряжений на эталонных сопротивлениях гироскопа.
В соответствии с выражением (2) была рассчитана погрешность определения курса в известном способе при следующих параметрах:
ΔU11 = ΔU12 =0,15 мВ, Кн11=Кн12=3,5•10-71/с мВ, ΔKн11 = ΔKн12 =3,5•10-101/с мВ,
ω
ϕ = 55,5°, Δϕ = 0,05°, ϑ = γ = 30°,
Ω = 15 градус/час.
На фиг. 1 показана теоретическая зависимость погрешности определения истинного курса известным способом при этих параметрах.
Таким образом, из зависимости 1, представленной на фиг.1, следует, что при известном способе компенсации вредных составляющих угловых скоростей, имеет место существенная погрешность гирокомпасирования с применением гироскопического датчика угловой скорости. Эта погрешность обусловлена параметрами гироскопа и ошибками их задания при компенсации, углами наклона объекта и ошибками их задания при компенсации, угловой скоростью Земли, широтой местоположения и ошибкой ее задания, погрешностью измерения напряжений с эталонных сопротивлений гироскопа. При этом погрешность определения курса при неточной компенсации имеет колебательный характер в зависимости от курсового угла. Расчетная амплитуда изменения систематической погрешности гирокомпасирования вследствие неточной компенсации составила 0,5 град.
Техническим результатом, который может быть получен при осуществлении настоящего изобретения, является повышение точности алгоритмической компенсации погрешности гирокомпасирования с применением гироскопического датчика угловой скорости.
Технический результат достигается тем, что с использованием известного способа формирования компенсации погрешности гирокомпасирования с применением гироскопического датчика угловой скорости предварительно определяют угол истинного курса, а при настройке гироскоп устанавливают на наклонно-поворотный стенд, задают известные азимутальные положения корпуса гироскопа в диапазоне от 0 до 360 градусов при горизонтальном положении плоскостей чувствительности, определяют погрешность гирокомпасирования на этих азимутальных углах, затем на разных известных азимутальных углах гироскоп наклоняют на известные углы сначала по тангажу при отсутствии угла крена, а потом по крену при отсутствии угла тангажа и определяют при этом коэффициенты влияния на погрешность углов наклона на известных азимутальных углах, после этого погрешность гирокомпасирования в горизонтальном положении и коэффициенты влияния на погрешность гирокомпасирования углов наклона по тангажу и крену в зависимости от азимутального угла представляют в виде синусоидальных законов с постоянными составляющими, параметры которых находят на основе измеренных зависимостей, а затем при операции гирокомпасирования компенсацию определяют по следующей формуле
где
ψ1 - угол истинного курса, определенный известным способом,
[a0+b0sin(ψ1+Δψ0)] - погрешность гирокомпасирования в горизонтальном положении,
a0, b0, Δψ0 - параметры погрешности гирокомпасирования в горизонтальном положении,
[aυ+bυsin(ψ1+Δψυ)] - коэффициент влияния угла наклона по тангажу на погрешность гирокомпасирования,
aυ,bυ, Δψυ - параметры коэффициента влияния наклона по тангажу на погрешность гирокомпасирования,
[aγ+bγsin(ψ1+Δψγ)] - коэффициент влияния угла наклона по крену на погрешность гирокомпасирования,
aγ, bγ, Δψγ - параметры коэффициента влияния наклона по крену на погрешность гирокомпасирования,
υ, γ - углы наклона по тангажу и крену.
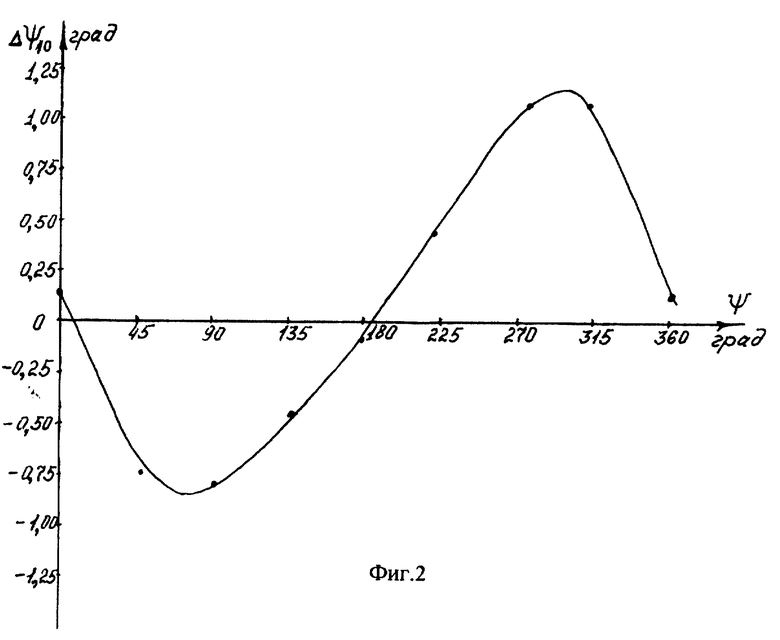
На фиг. 2 представлена экспериментальная зависимость погрешности гирокомпасирования Δψ10 с применением динамически настраиваемого гироскопа ГВК-6 при использовании известного способа компенсации в зависимости от азимутального угла ψ при горизонтальном расположении его осей чувствительности. Эту зависимость можно аппроксимировать в виде синусоидального закона с постоянной составляющей в следующем виде
Δψ10 = a0+b0sin(ψ+Δψ0), (5)
где
а0=0,15 град, b0=0,95 град, Δψ0 =80,1 град.
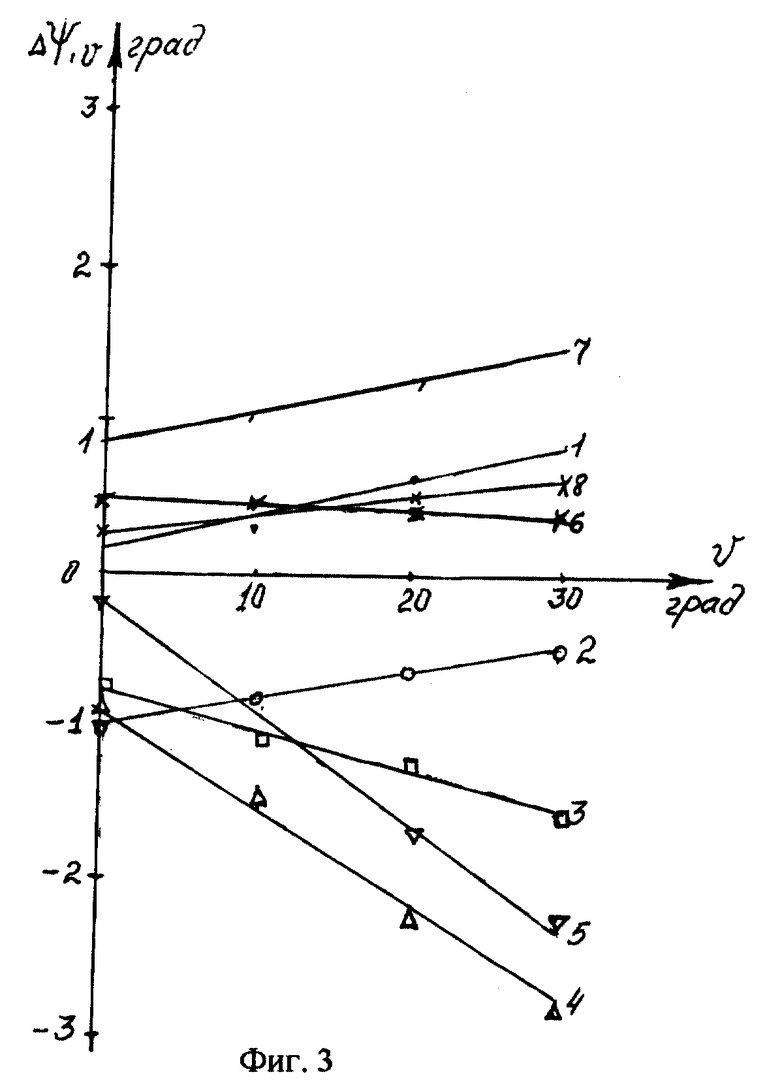
На фиг.3 показаны экспериментальные зависимости 1-8 погрешностей гирокомпасирования Δψ1υ соответственно для азимутальных углов ψ = 0, 45, 90, 135, 180, 225, 270, 315 градусов при наклонах по тангажу в случае применения известного способа компенсации погрешности гирокомпасирования. Эти погрешности при разных показаниях можно аппроксимировать линейными функциями, тангенс угла наклона которых будет характеризовать коэффициенты влияния наклона по тангажу на погрешность гирокомпасирования.
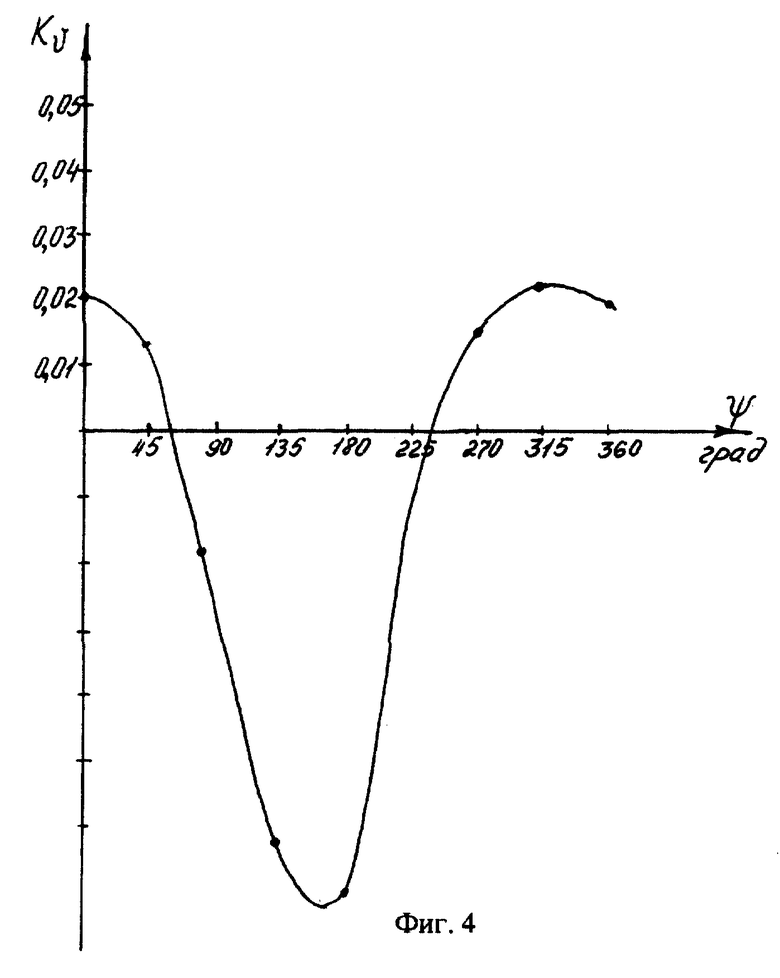
На фиг.4 показана экспериментальная зависимость коэффициента влияния кυ от азимутального угла на погрешность гирокомпасирования при наклоне по тангажу с применением известного способа формирования компенсации. Эту зависимость можно аппроксимировать синусоидальным законом с постоянной составляющей в следующем виде
кυ = aυ+bυsin(ψ+Δψυ), (6)
где
aυ = -0,025, bυ = 0,048, Δψυ = 76,7°.
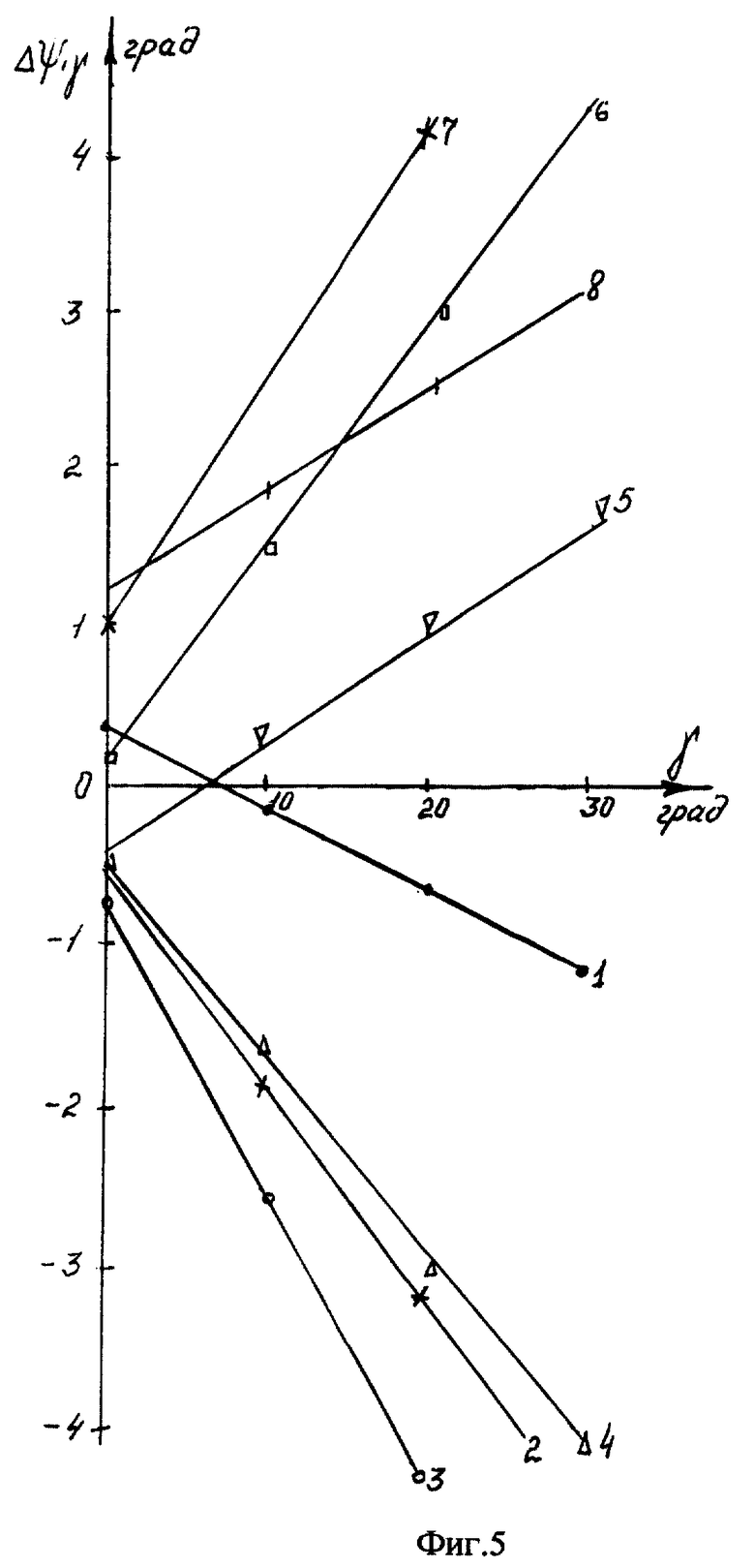
На фиг.5 показаны экспериментальные зависимости 1-8 погрешности гирокомпасирования Δψ1γ соответственно для азимутальных углов ψ =0, 45, 90, 135, 180, 225, 270, 315 градусов при наклонах по крену в случае применения известного способа компенсации погрешности гирокомпасирования. Эти погрешности при разных азимутальных углах можно аппроксимировать линейными функциями, тангенс угла наклона которых будет характеризовать коэффициенты влияния наклона по крену на погрешность гирокомпасирования.
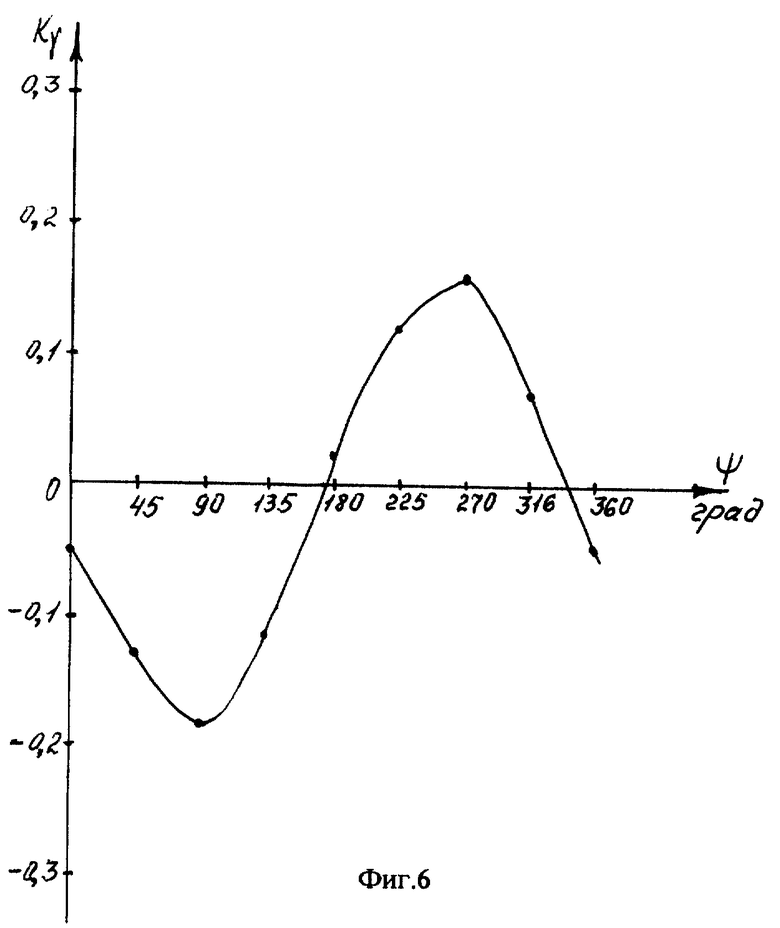
На фиг.6 показана экспериментальная зависимость от азимутального угла ψ коэффициента влияния кγ наклона по крену на погрешность гирокомпасирования при применении известного способа формирования компенсации. Эту зависимость можно аппроксимировать синусоидальным законом с постоянной составляющей в следующем виде
кγ = aγ+dγsin(ψ+Δψγ), (7)
где aγ =-0,01, bγ =0,17, Δψγ =11,9 град.
При гирокомпасировании с применением датчика угловой скорости предлагается формировать компенсацию погрешностей в виде закона (5) изменения погрешности в известном способе при горизонтальном положении осей чувствительности гироскопа с учетом коэффициентов влияния на погрешность углов наклона по тангажу (6) и крену (7).
Тогда предлагаемую компенсацию можно определить в виде
В связи с тем, что при гирокомпасировании точное значение азимутального угла ψ не известно, то вместо него в первом приближении можно использовать угол истинного курса ψ1, определенный с применением известного способа. Для погрешности гирокомпасирования несколько градусов такая замена не вызовет существенных изменений в законе предлагаемой компенсации. С учетом этого, заменив в выражении (8) ψ на ψ1, получим
Таким образом, предлагаемый способ формирования компенсации погрешности гирокомпасирования с применением гироскопического датчика угловой скорости имеет следующие отличия от известного способа:
- в операции предварительной настройки определяют остаточную погрешность гирокомпасирования при применении известного способа в горизонтальном положении осей чувствительности гироскопа и находят коэффициенты влияния на погрешность углов наклона по тангажу и крену в диапазоне азимутальных углов от 0 до 360 градусов;
- в операции гирокомпасирования аналитически представляют остаточную погрешность гирокомпасирования после применения компенсации по известному способу в виде новой формульной зависимости.
На фиг. 1, показана теоретическая зависимость погрешности определения истинного курса известным способом.
На фиг. 2 представлена экспериментальная зависимость погрешности гирокомпасирования с применением динамически настраиваемого гироскопа при горизонтальном расположении его осей чувствительности с использованием известного способа компенсации.
На фиг. 3 показаны экспериментальные зависимости погрешностей гирокомпасирования на разных азимутальных углах при наклоне по тангажу с применением известного способа.
На фиг. 4 показана экспериментальная зависимость от азимутального угла коэффициента влияния на погрешность гирокомпасирования наклона по тангажу с применением известного способа.
На фиг. 5 показаны экспериментальные зависимости погрешностей гирокомпасирования на разных азимутальных углах при наклоне по крену с применением известного способа.
На фиг. 6 показана экспериментальная зависимость от азимутального угла коэффициента влияния на погрешность гирокомпасирования наклона по крену с применением известного способа.
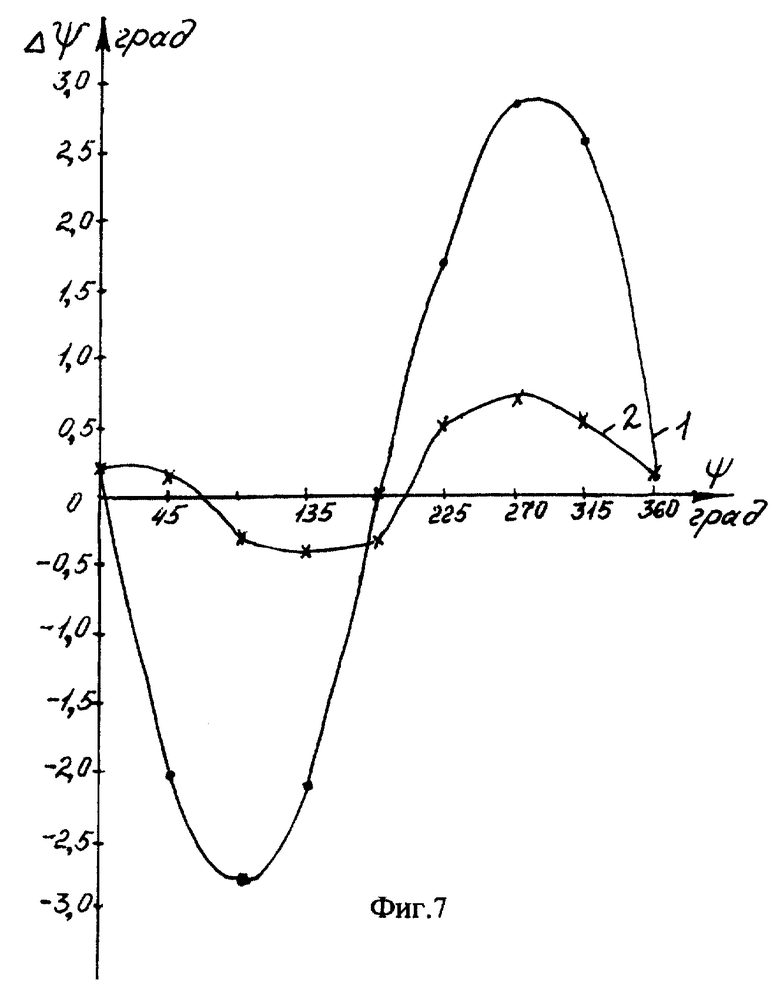
На фиг. 7 показаны экспериментальные зависимости от азимутального угла погрешностей гирокомпасирования при наклоне по тангажу и крену с применением известного и предлагаемого способов.
Проводилась экспериментальная сравнительная оценка погрешности гирокомпасирования с помощью гироскопического датчика угловой скорости с использованием известного и предлагаемого способов.
Экспериментальные исследования проводились с применением датчика угловой скорости на основе динамически настраиваемого гироскопа ГВК-6. Динамически настраиваемый гироскоп устанавливался на платформу наклонно-поворотного стенда, с помощью которого осуществлялся поворот гироскопа в азимуте и наклон по крену и тангажу. Определялись коэффициенты модели дрейфа гироскопа. Модель дрейфа учитывала составляющие, не зависящие от ускорения и зависящие от ускорения в первой степени.
С использованием модели дрейфа реализовывался известный способ компенсации погрешности.
В горизонтальном положении осей чувствительности гироскопа с помощью стенда задавались известные азимутальные углы ψ =0, 45, 90, 135, 180, 225, 270, 315 градусов с точностью 10 угл. сек. Определялись погрешности гирокомпасирования с применением известного способа, которые представлялись в виде аналитического выражения (5).
На азимутальных углах ψ =0, 45, 90, 135, 180, 225, 270, 315 град гироскоп наклонялся по тангажу на углы υ =0, 10, 20, 30 градусов с точностью 10 угл. сек. На основе полученных экспериментальных данных определялся коэффициент влияния наклона по тангажу на погрешность гирокомпасирования на разных азимутальных углах. Коэффициент влияния наклона по тангажу на погрешность гирокомпасирования на разных азимутальных углах представлялся в виде аналитического выражения (6).
На азимутальных углах ψ =0, 45, 90, 135, 180, 225, 270, 315 град гироскоп наклонялся по крену на углы γ =0, 10, 20, 30 градусов с точностью 10 угл. сек. На основе полученных экспериментальных данных определяют коэффициент влияния наклона по крену на погрешность гирокомпасирования на разных азимутальных углах. Коэффициент влияния наклона по крену на погрешность гирокомпасирования на разных азимутальных углах представлялся в виде аналитического выражения (7).
При гирокомпасировании в первом приближении в качестве азимутального угла использовались значения курсовых углов, полученные с применением известного способа и компенсация формировалась с использованием зависимости (9).
Гироскопу задавались углы наклона по тангажу и крену υ = γ = 10° и на азимутальных углах ψ =0, 45, 90, 135, 180, 225, 270, 315o определялись погрешности гирокомпасирования с применением известного и предлагаемого способов.
Погрешность гирокомпасирования определялась как разность известных задаваемых азимутальных углов и измеренных.
На фиг. 7 показаны экспериментальные зависимости от азимутального угла погрешностей гирокомпасирования при наклоне по тангажу и крену с применением известного 1 и предлагаемого 2 способов.
Из зависимостей, представленных на фиг.7, видно, что применение предлагаемого способа позволяет существенно повысить точность гирокомпасирования. Так амплитуда погрешности гирокомпасирования с применением известного способа в диапазоне азимутальных углов от 0 до 360 градусов составила 2,8 град, а при использовании предлагаемого способа амплитуда погрешности не превысила 0,6 град.
Таким образом, в проведенных сравнительных экспериментальных испытаниях погрешность гирокомпасирования уменьшилась в 4,5 раза при использовании предлагаемого способа.
Использование предлагаемого способа формирования компенсации погрешности гирокомпасирования с применением гироскопического датчика угловой скорости обеспечивает по сравнению с известными способами повышение точности гирокомпасирования, что расширяет области использования гирокомпасных устройств на его основе. Применение предлагаемого способа позволяет проводить начальную выставку по курсу бесплатформенных инерциальных систем, создавать двухрежимные приборы курса для наземных объектов, определяющих курс при остановках и сохраняющих его при движении.
Способ может быть использован при создании гирокомпасов и курсоуказывающих устройств аналитического типа. Для формирования компенсации погрешности гирокомпасирования с применением гироскопического датчика угловой скорости предварительно определяют угол истинного курса. При настройке гироскопа определяют погрешность гирокомпасирования при горизонтальном положении плоскости его осей чувствительности на заданных азимутальных углах в диапазоне 0 - 360o. На заданных азимутальных углах гироскоп наклоняют на заданные углы сначала по тангажу, а потом по крену и определяют при этом коэффициенты влияния на погрешность углов наклона. Погрешность гирокомпасирования в горизонтальном положении и коэффициенты влияния на погрешность гирокомпасирования углов наклона в зависимости от азимутального угла представляют в виде синусоидальных законов с постоянными составляющими, параметры которых находят на основе измеренных зависимостей. При операции гирокомпасирования компенсацию формируют в виде закона азимутального изменения погрешности гирокомпасирования в горизонтальном положении с учетом влияния наклона и использования в первом приближении вместо угла истинного азимута курсового угла. Обеспечивается повышение точности компенсации погрешности. 7 ил.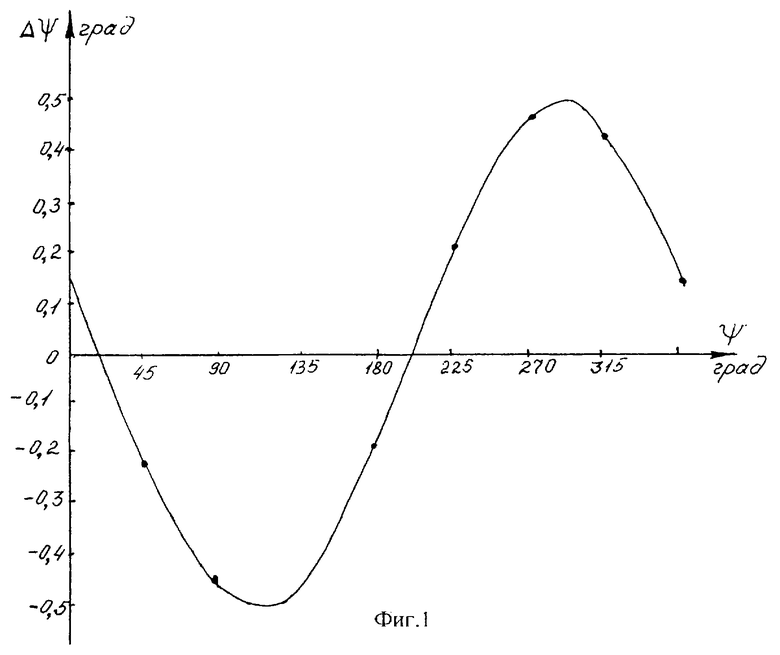
Способ формирования компенсации погрешности гирокомпасирования с применением гироскопического датчика угловой скорости, основанный на предварительном определении угла истинного курса, отличающийся тем, что при настройке гироскоп устанавливают на наклонно-поворотный стенд, задают известные азимутальные положения корпуса гироскопа в диапазоне 0-360o при горизонтальном положении плоскости его осей чувствительности, определяют погрешность гирокомпасирования на этих азимутальных углах, затем на разных известных азимутальных углах гироскоп наклоняют на известные углы сначала по тангажу при отсутствии угла крена, а потом по крену при отсутствии угла тангажа и определяют при этом коэффициенты влияния на погрешность углов наклона на известных азимутальных углах, после этого погрешность гирокомпасирования в горизонтальном положении и коэффициенты влияния на погрешность гирокомпасирования углов наклона по тангажу и крену в зависимости от азимутального угла представляют в виде синусоидальных законов с постоянными составляющими, параметры которых находят на основе измеренных зависимостей, а затем при операции гирокомпасирования компенсацию определяют по следующей формуле
где Ψ1 - угол истинного курса, определенный известным способом,
[a0+b0sin(ψ1+Δψ0)] - погрешность гирокомпасирования в горизонтальном положении,
а0, b0, Δψ0 - параметры погрешности гирокомпасирования в горизонтальном положении,
[aυ+bυsin(ψ1+Δψυ)] - коэффициент влияния угла наклона по тангажу на погрешность гирокомпасирования,
av, bv, Δψυ - параметры коэффициента влияния наклона по тангажу на погрешность гирокомпасирования,
[aγ+bγsin(ψ1+Δψγ)] - коэффициент влияния угла наклона по крену на погрешность гирокомпасирования,
aγ, bγ, Δψγ - параметры коэффициента влияния наклона по крену на погрешность гирокомпасирования,
υ, γ - углы наклона по тангажу и крену.
| V.L | |||
| Budkin, S.P | |||
| Redkin | |||
| Cyrocompassing on a Movable Object by Means of Angular Rate Sensor on the Basis of Dynamically Tuned Gyro | |||
| Second International Symposium on Inertial Technology in Beijing | |||
| Beijing, China, October, 1998, p.143-151 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА С ПОМОЩЬЮ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1995 |
|
RU2098766C1 |
| RU 2073206 C1, 10.02.1997 | |||
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 1999 |
|
RU2153152C1 |

