Изобретение относится к радиолокации и может быть использовано в радиолокационных импульсно-доплеровских станциях непрерывного сопровождения целей для защиты от уводящей по частоте помехи.
Помехи, уводящие по частоте, представляют собой последовательность ответных импульсов, несущая частота которых плавно смещается [1, с.78].
Устройство сопровождения по скорости (УСС) обычно состоит из программно реализуемых в ЭВМ частотного дискриминатора и фильтра сопровождения по частоте (α-β фильтра сопровождения) [2, с.73-76].
На вход устройства сопровождения по скорости поступают две последовательности импульсов: сигналы от цели и помехи. Амплитуда импульсов, помехи превышает амплитуду импульсов сигнала цели. В начальный момент воздействия ответные импульсы помехи совпадают по частоте с импульсами, отраженными от цели. За счет большей амплитуды импульсов помехи при наличии совмещенных цели и помехи устройство сопровождения по скорости начинает сопровождать сигнал помехи. Параметры увода подбираются так, чтобы за время увода смещение помехи по частоте относительно цели превысило апертуру дискриминатора. При отслеживании сигнала помехи УСС выдает ложную информацию потребителям, например системе целеуказания. При выключении помехи, поскольку цель находится вне апертуры частотного дискриминатора, сопровождение срывается. После перезахвата сигнала цели начинается новый цикл увода. Уводящая по частоте помеха приводит к перерывам информации в угломерном канале [1, с.78].
В качестве прототипа предлагаемого изобретения примем канал сопровождения цели по скорости импульсно-доплеровской РЛС [2, с.73].
Для защиты от уводящей помехи в момент начала воздействия помехи запоминают координаты сопровождаемого сигнала. После окончания воздействия помехи или при выполнении условий раздельного наблюдения помехи и цели УСС возвращается на запомненное положение сигнала цели.
В известных УСС для обнаружения начала воздействия уводящей по частоте помехи сопоставляются значения скорости сближения с целью, полученные из канала сопровождения по дальности и полученные пересчетом по доплеровской частоте [3, с.52].
Проверяемое условие начала воздействия уводящей по частоте помехи имеет вид
где  -скорость сближения с целью из канала сопровождения по дальности;
-скорость сближения с целью из канала сопровождения по дальности;
 - скорость сближения с целью, рассчитанная по доплеровской частоте;
- скорость сближения с целью, рассчитанная по доплеровской частоте;
F - доплеровская частота цели;
Δ - строб сопоставления по скорости;
λ - несущая частота излучения РЛС.
Во избежание ложного срабатывания условия (1) в связи с большими флюктуациями  в канале сопровождения по дальности величина строба сопоставления по скорости А задается достаточно большой, что приводит к задержке обнаружения начала увода и, как следствие, запоминаемые параметры сигнала отличаются от параметров сигнала цели, наблюдавшихся до начала воздействия помехи.
в канале сопровождения по дальности величина строба сопоставления по скорости А задается достаточно большой, что приводит к задержке обнаружения начала увода и, как следствие, запоминаемые параметры сигнала отличаются от параметров сигнала цели, наблюдавшихся до начала воздействия помехи.
С момента начала воздействия помехи потребителям информации УСС начинает выдавать прогнозируемое значение частоты сигнала цели, тогда как УСС сопровождает сигнал помехи. После того как сопровождаемая частота и прогнозируемая частота сигнала цели разойдутся на величину, большую чем апертура дискриминатора, нуль дискриминатора устанавливают на прогнозируемую частоту сигнала цели, переходя таким образом на сопровождение цели.
Эффективность системы защиты от уводящей по частоте помехи зависит от быстроты обнаружения начала воздействия помехи и длительности использования прогнозируемых значений частоты сигнала цели.
Важно обнаруживать начало воздействия помехи как можно раньше, так как в этом случае параметры сигнала, используемые для вычисления прогнозируемых значений частоты сигнала цели, менее искажены помехой.
Задачей изобретения является повышение эффективности защиты от уводящей по частоте помехи за счет уменьшения времени обнаружения начала воздействия помехи, в результате чего уменьшаются ошибки прогнозирования частоты цели, что повышает вероятность возврата к сопровождению сигнала цели.
Изобретение использует различие ширины полосы частот сигнала цели и ширины полосы частот принимаемого сигнала, представляющего собой сумму сигналов цели и уводящей помехи. В соответствии с логикой действия уводящей помехи в начальный момент включения помехи полоса частот сигнала помехи совпадает с полосой частот сигнала цели. Затем помеха начинает смещаться по частоте относительно сигнала цели, в результате чего принимаемый сигнал сначала расширяется по частоте, а затем разделяется на два сигнала разной частоты, один из которых является целью, а другой помехой. В начале воздействия уводящей помехи (до разделения сигналов цели и помехи) ширина полосы частот принимаемого сигнала больше, чем ширина одного сигнала цели, поскольку принимаемый сигнал является суммой сигнала цели и сигнала помехи.
Поставленная задача достигается тем, что начало воздействия уводящей по частоте помехи обнаруживают по расширению полосы частот сопровождаемого сигнала. Для этого полосу частот сопровождаемого сигнала сравнивают с порогом, задаваемым равным ширине полосы частот сигнала цели в отсутствие помехи. При цифровой обработке сигналов с применением быстрого преобразования Фурье (БПФ) ширина полосы частот сигнала цели определяется характеристиками излучения, уровнем сигнала и параметрами БПФ.
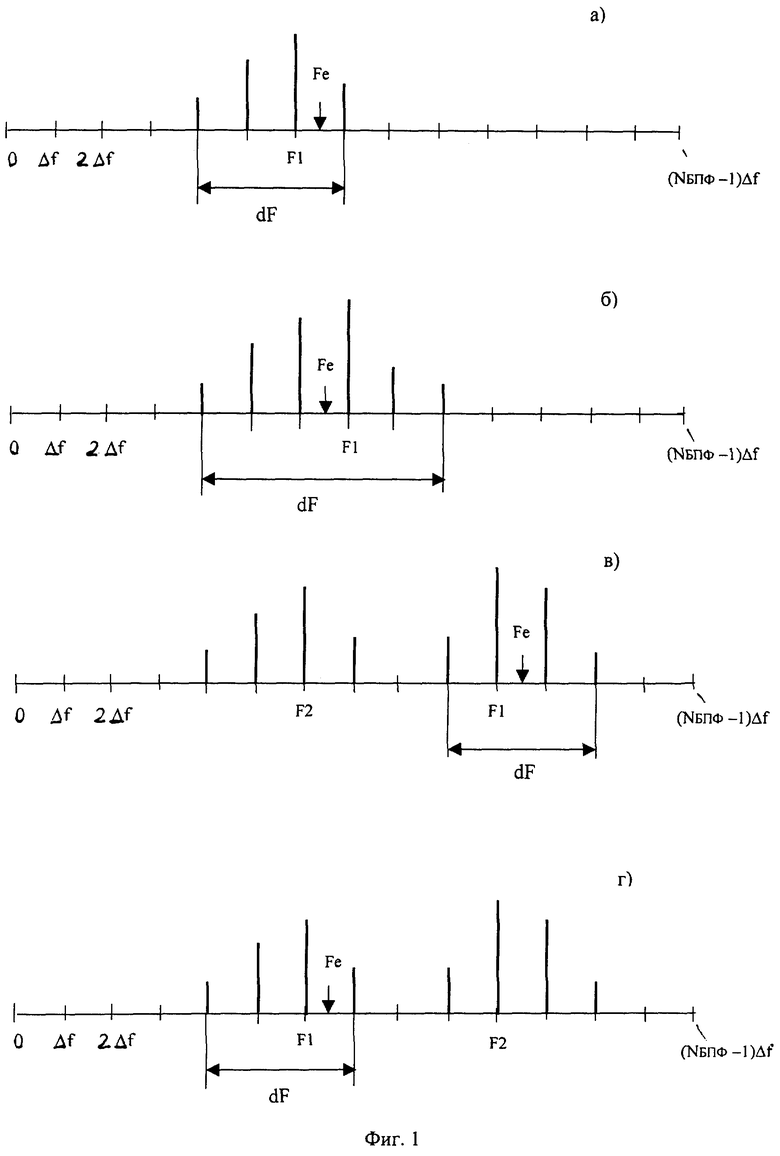
Изображение наблюдаемых на выходе БПФ сигналов приведено на фиг.1, где по горизонтальной оси отложены отстоящие друг от друга на Δf значения частоты, соответствующие отсчетам БПФ. Величина Δf определяется параметрами БПФ. Вертикальные линии отображают амплитуды по частотам (отсчетам БПФ). На фиг.1 показаны: F1, F2 - частоты с максимальной амплитудой сигналов; dF - ширина полосы частот сигнала; вертикальной стрелкой показано экстраполированное значение Fe частоты сопровождаемого сигнала. Характерный вид амплитуд сигнала цели на выходе БПФ, когда один сигнал наблюдается в 4-х последовательных отсчетах, приведен на фиг.1а.
В начальный момент увода, пока сигналы уводящей помехи совпадают по частоте с сигналом цели, на выходе БПФ будет наблюдаться картина, соответствующая фиг.1а. После начала увода сначала возникает расширение полосы частот принимаемого сигнала (фиг.1б), затем сигналы цели и помехи разделяются по частоте, появляются два сигнала (фиг.1в, 1г), ширина полосы частот каждого из которых соответствует ширине полосы частот сигнала цели.
Предлагаемое устройство сопровождения по скорости с защитой от уводящей помехи после того, как сопровождаемый сигнал помехи и прогнозируемое положение сигнала цели разойдутся на заданную величину, определяемую полосой частот сигнала цели, переходит на сопровождение сигнала цели.
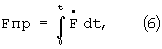
Блок - схема устройства сопровождения по скорости с защитой от уводящей по частоте помехи приведена на фиг.2.
Устройство сопровождения по скорости с защитой от уводящей по частоте помехи содержит приемник 1, устройство расстановки стробов 2, аналого-цифровой преобразователь (АЦП) 3, блок быстрого преобразования Фурье (БПФ) 4, блок обработки сигналов 5, первое пороговое устройство 6, первый управляющий ключ 7, первую ячейку памяти обнуляемую 8, интегратор 9, сумматор 10, схему вычитания 11, второй управляющий ключ 12, второе пороговое устройство 13, первый двухканальный переключатель 14, частотный дискриминатор 15, третий управляющий ключ 16, фильтр сопровождения по частоте (α-β фильтр) 17, вторую ячейку памяти обнуляемую 18, второй двухканальный переключатель 19, выход которого является выходом устройства.
В блок схеме фиг.2 для коммутации сигналов и управления слежением применены управляющие ключи 7, 12, 16, двухканальные переключатели 14, 19, сумматор 10, ячейки памяти обнуляемые 8, 18, схемное выполнение которых известно из литературы [4, с.20-26].
Так, двухканальный переключатель по управляющей команде соединяет один из двух входов с выходом. Управляющий ключ пропускает сигнал со входа на выход при наличии второго сигнала на управляющем входе.
Ячейка памяти обнуляемая представляет собой устройство с двумя входами и одним выходом, фиг.3. Один вход служит для приема запоминаемой величины, а второй вход является управляющим. Запоминаемая величина с момента ее поступления на вход постоянно выдается на выход до момента поступления управляющего сигнала. При поступлении на управляющий вход управляющего сигнала U=1 сигнал на выходе становится равным нулю. На фиг.3 показаны: α - входная запоминаемая величина, U - управляющий сигнал, β - выходная величина.
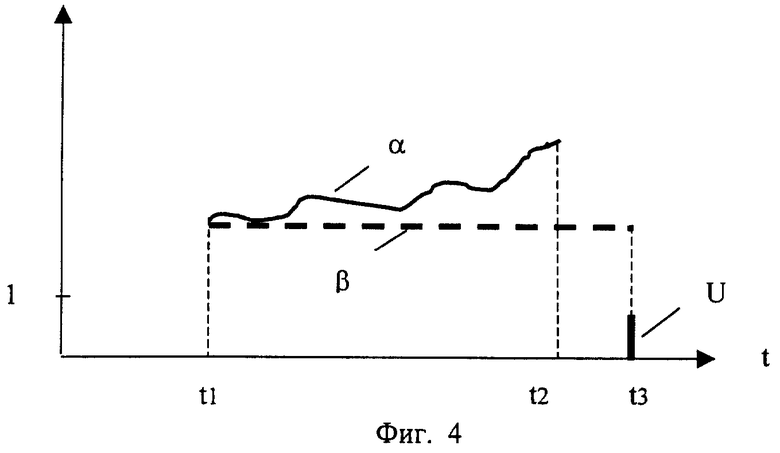
Работа ячейки памяти обнуляемой иллюстрируется фиг.4.
Пусть α(t)≠0 при t1<t≤t2, где t-текущее время.
U=1 при t=t3, где t3≥t2
U=0 при t≠t3.
Тогда выходной сигнал β(t) ячейки памяти обнуляемой определяется соотношениями


Блок БПФ 4 выполняет стандартную операцию быстрого преобразования Фурье [5, с.366-376] над комплексными составляющими временной выборки.
Блок обработки сигналов 5 имеет два входа и два выхода. На первый вход бл.5 поступает выходной массив БПФ. На второй вход бл.5 поступает экстраполированное значение частоты сопровождаемого сигнала Fe. В результате производимой в бл.5 обработки выходного массива БПФ на первый выход бл.5 выдается частота F1, соответствующая максимальной амплитуде сигнала, ближайшего к частоте Fe, а на второй выход бл.5 выдается ширина полосы частот dF этого сигнала.
Алгоритм работы блока обработки сигналов поясняет фиг.1.
На фиг.1 показаны частота обнаруженного сигнила F1, являющаяся частотой с максимальной амплитудой, ближайшей к экстраполированному значению частоты Fe, и ширина полосы частот этого сигнала dF. При наличии на выходе блока БПФ одного сигнала (фиг.1а, 1б) на выход блока обработки выдается его частота F1 и ширина полосы частот dF. При наличии на выходе блока БПФ двух сигналов (фиг.1в, 1г) на выход блока обработки выдается частота сигнала F1, ближайшего к частоте Fe. Фиг.1в соответствует случаю, когда из блока обработки выдается частота сигнала помехи. Фиг.1г соответствует случаю, когда из блока обработки выдается частота сигнала цели.
Пороговое устройство 6 производит сравнение входной величины с пороговым значением. Если входная величина больше порогового значения, то на выходе порогового устройства формируется ″1″.
Частотный дискриминатор 15 [6, с.288] производит сравнение мгновенных значений измеренного и опорного сигналов и выдает на выход линейную функцию разности этих сигналов, называемую рассогласованием.
Фильтр сопровождения по частоте 17 (α-β фильтр) [2, с.76] является устройством с двумя входами и одним выходом. На один вход подается рассогласование ΔF, на другой вход - начальные значения частоты Fо. На выход выдается экстраполированное значение частоты Fe в соответствии с соотношениями
где ΔF - рассогласование,
Fо - начальное значение частоты,
n=0, 1, 2, 3,... - номер шага вычислений.
Начиная с момента подачи на вход начального значения частоты Fo, экстраполированная частота Fe рассчитывается в соответствии с приведенными соотношениями (4).
Предлагаемое устройство сопровождения по скорости с защитой от уводящей помехи, см. фиг.2, при отсутствии помехи работает следующим образом.
Сигнал от приемника 1 через устройство расстановки стробов 2 поступает на АЦП 3, далее на БПФ 4 и блок обработки сигналов 5, на выходе которого формируется F1 - частота сигнала и dF - ширина полосы частот сигнала. По частоте F1 в частотном дискриминаторе бл.15 формируется рассогласование ΔF частоты F1 от экстраполированного значения Fe частоты сопровождаемой цели, вычисляемого в (α-β) фильтре сопровождения по частоте 17. Поступившее на вход бл.17 значение ΔF используется в нем для уточнения Fe. Величина Fe с выхода бл.17 поступает на второй двухканальный переключатель 19. Поскольку на управляющем входе бл.19 при отсутствии помехи сигнал равен нулю, то величина Fe проходит на выход бл.19, являющегося выходом всего устройства, т.е. Fвых=Fe.
В предлагаемом изобретении см. (фиг.2) начало воздействия помехи определяется по выполнению условия

где dF - ширина полосы частот сигнала, Δ1 - пороговое значение. Величина Δ1 подбирается с учетом известных характеристик принимаемого отраженного сигнала цели и параметров системы обработки так, чтобы вероятность ложного срабатывания этого условия была меньше заданной.
Проверка условия (5) производится в первом пороговом устройстве 6, при появлении “1” на выходе которого:
- запоминается текущее экстраполированное значение частоты сопровождаемой цели Fe. Для этого через управляющий ключ 7 при поступлении на его управляющий вход “1” из бл.6 значение частоты Fe подается в первую ячейку памяти обнуляемую 8;
- запускается интегратор 9, в котором в соответствии с заложенным законом изменения доплеровской частоты цели вычисляется прогнозируемое изменение значения частоты цели Fпp за время действия помехи по соотношению
где  - закон изменения доплеровской частоты цели, задаваемый априорно,
- закон изменения доплеровской частоты цели, задаваемый априорно,
t - время действия уводящей помехи;
- начинает работать сумматор 10, вычисляющий расчетное значение частоты цели Fпам=Fe+Fпp;
- на управляющий вход второго двухканального переключателя 19 через вторую ячейку памяти обнуляемую 18 поступает “1”, в результате чего на выход бл.19 будет выдаваться Fвых=Fпам. (При наличии на управляющем входе бл.19 “0” на выход будет выдаваться Fвых=Fe).
Таким образом, после начала воздействия уводящей по частоте помехи УСС сопровождает помеху, а выдаваемое потребителям расчетное значение частоты цели Fпам. формируется в сумматоре бл.10.
Возврат к сопровождению сигнала цели, включая его обработку в частотном дискриминаторе и фильтре сопровождения по частоте, происходит следующим образом. Решение о возврате с сопровождения помехи на сопровождение цели принимается при выполнении условия

где Δ2 - константа, соответствующая минимальному разведению цели и помехи, при котором с заданной вероятностью обеспечивается их раздельное наблюдение в блоке обработки.
Условие |Fe-Fпам|>Δ2 проверяется во втором пороговом устройстве 13. Проверка превышения порога в бл.13 начинает производиться после обнаружения воздействия помехи, для чего формируемая в схеме вычитания 11 разность Fe-Fпам подается на бл.13 через второй управляющий ключ 12. Ключ бл.12 открывается при поступлении на его управляющий вход “1” с выхода второй ячейки памяти обнуляемой 18.
Наличие “1” на выходе бл.13 означает принятие решения о возврате на сопровождение цели.
При появлении “1” на выходе второго порогового устройства 13:
- на обнуляющий вход первой ячейки памяти обнуляемой 8 поступает “1”, что вызывает обнуление сигнала на выходе бл.8;
- “1” поступает на обнуляющий вход второй ячейки памяти обнуляемой 18, что вызывает обнуление сигнала на выходе этого блока. “Нуль” с выхода бл.18 поступает на управляющий вход второго двухканального переключателя 19, в результате чего на выход бл.19 начнет подаваться Fвыx=Fe;
- первый двухканальный переключатель 14, получив на управляющий вход “1”, пропустит на выход величину Fпам, которая будет использована в качестве опорного сигнала частотного дискриминатора 15;
- третий управляющий ключ 16, получив на управляющий вход “1”, пропустит на выход Fпам, которое поступит на вход фильтра сопровождения по частоте 17 в качестве нового значения начальных условий; в фильтре сопровождения по частоте 17 в результате подстановки новых начальных условий произойдет присвоение Fe=Fпам. Это новое значение Fe, поступая на вход блока обработки 5, приведет к формированию на его выходе значения частоты F1, ближайшей к Fпам.
В результате указанной работы блоков устройства сопровождения по скорости с защитой от уводящей по частоте помехи происходит переход на сопровождение сигнала цели, который в момент выполнения условия (7) ближе к прогнозируемой частоте Fпам, чем сигнал помехи.
Предлагаемое устройство сопровождения по скорости с защитой от уводящей по частоте помехи подготовлено к внедрению в разработанных ОАО “Корпорация “Фазотрон-НИИР” бортовой РЛС “Жук-М”.
Литература
1. Защита от радиопомех. Под ред. М.В. Максимова. - М.: Сов. радио, 1978.
2. Г.И. Горгонов. Автоматическое сопровождение целей в бортовой радиолокационной станции с ЭВМ. - М., Академия им. Жуковского. 1988.
3. Ю.Я. Алексеев, О.В. Викулов, М.В. Громов, В.В. Дрогалин, А.И. Канащенков, В.И. Меркулов, О.Ф. Самарин, И.Н. Умнов, B.C. Чернов. Способы и средства помехозащиты радиолокационных измерителей дальности и скорости в режимах сопровождения. Зарубежная радиоэлектроника, № 1, 2000.
4. А. Флорес. Организация вычислительных машин. Пер. с английского. - М., 1972.
5. Dж. Бендат, А. Пирсол. Прикладной анализ случайных данных. - М.: МИР, 1989.
6. Теоретические основы радиолокации. Под редакцией В.Е. Дулевича. - М.: Сов. радио, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАЛЬНОМЕР ПРИ ВОЗДЕЙСТВИИ ПОМЕХИ, УВОДЯЩЕЙ ПО ДАЛЬНОСТИ | 1997 |
|
RU2119174C1 |
| Способ сопровождения в радиолокационной станции групповой воздушной цели из класса "самолёты с турбореактивными двигателями" при воздействии уводящих по скорости помех | 2016 |
|
RU2617110C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЁТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" ПРИ ВОЗДЕЙСТВИИ УВОДЯЩЕЙ ПО СКОРОСТИ ПОМЕХИ | 2015 |
|
RU2579353C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ УГЛОВОЙ ОШИБКИ ПРИ ПРИЕМЕ ШУМОВОГО СИГНАЛА | 2004 |
|
RU2255349C1 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ДВУХ ЦЕЛЕЙ | 1992 |
|
RU2074405C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ ПО ДАЛЬНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ С ВЫСОКОЙ ЧАСТОТОЙ ПОВТОРЕНИЯ ИМПУЛЬСОВ | 2004 |
|
RU2262715C1 |
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2018 |
|
RU2665031C1 |
Изобретение относится к радиолокации. Технический результат заключается повышении эффективности защиты от уводящей по частоте помехи. Устройство фиксирует начало воздействия уводящей помехи по расширению полосы частот сопровождаемого сигнала и обеспечивает сопровождение сигнала цели при приеме одновременно сигналов цели и помехи. 4 ил.
Устройство сопровождения по скорости с защитой от уводящей помехи, содержащее последовательно соединенные приемник, устройство расстановки стробов, аналого-цифровой преобразователь и блок быстрого преобразования Фурье (БПФ), отличающееся тем, что введены блок обработки сигналов, вход которого соединен с выходом блока БПФ, последовательно соединенные частотный дискриминатор, вход которого соединен с первым выходом блока обработки сигналов, фильтр сопровождения по частоте и второй двухканальный переключатель, выход фильтра сопровождения по частоте соединен также со вторым входом блока обработки сигналов, выход второго двухканального переключателя является выходом всего устройства сопровождения по скорости с защитой от уводящей помехи, последовательно соединенные первое пороговое устройство, вход которого соединен со вторым выходом блока обработки сигналов, и вторая ячейка памяти обнуляемая, выход которой соединен с управляющим входом второго двухканального переключателя, последовательно соединенные интегратор, вход которого соединен с выходом первого порогового устройства, сумматор, схема вычитания, второй управляющий ключ и второе пороговое устройство, выход сумматора соединен также со вторым входом второго двухканального переключателя, второй вход схемы вычитания соединен с выходом фильтра сопровождения по частоте, управляющий вход второго управляющего ключа соединен с выходом второй ячейки памяти обнуляемой, выход второго порогового устройства соединен с обнуляющим входом второй ячейки памяти обнуляемой, последовательно соединенные первый управляющий ключ, вход которого соединен с выходом фильтра сопровождения по частоте, а управляющий вход соединен с выходом первого порогового устройства, и первая ячейка памяти обнуляемая, обнуляющий вход которой соединен с выходом второго порогового устройства, выход которой соединен со вторым входом сумматора, первый двухканальный переключатель, входы которого соединены с выходами сумматора и фильтра сопровождения по частоте, управляющий вход соединен с выходом второго порогового устройства, а выход соединен со вторым входом частотного дискриминатора, третий управляющий ключ, вход которого соединен с выходом сумматора, управляющий вход соединен с выходом второго порогового устройства, а выход со вторым входом фильтра сопровождения по частоте.
| ГОРГОНОВ Г.И | |||
| Автоматическое сопровождение целей в бортовой радиолокационной станции с ЭВМ | |||
| - М.: Академия им | |||
| Жуковского, 1988, с.73 | |||
| СЛЕДЯЩИЙ РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ С ЗАЩИТОЙ ОТ УВОДЯЩИХ ПОМЕХ | 2000 |
|
RU2178895C1 |
| US 3947848, 30.03.1976 | |||
| US 4010469, 01.03.1977 | |||
| Устройство для транспортировки мелких животных | 1986 |
|
SU1407467A1 |
