Изобретение относится к радиолокации и может быть использовано для формирования угловой ошибки в радиолокационных когерентных моноимпульсных станциях с фазовым суммарно-разностным пеленгатором при измерении угловых координат источника шумового сигнала или при автоматическом сопровождении источника шумового сигнала.
Известно устройство формирования угловой ошибки в моноимпульсной РЛС с фазовым суммарно-разностным методом пеленгации [А.И.Леонов, К.И.Фомичев. Моноимпульсная радиолокация. - М.: Радио и связь, 1984, стр.71], блок-схема которого приведена на фиг.1. Угловой ошибкой или сигналом ошибки называют величину, функционально связанную с углом между осью антенны и направлением на источник принимаемого антенной излучения. Входящие в схему фиг.1 блоки, используемые по стандартному назначению: антенна, смеситель, генератор опорного сигнала, фазовращатель, усилитель промежуточной частоты, система автоматической регулировки усиления, фазовый детектор, - описаны там же [А.И.Леонов, К.И.Фомичев. Моноимпульсная радиолокация - М.: Радио и связь, 1984, стр. 14-65].
В результате работы устройства фиг.1 на его выходе формируется угловая ошибка α [см. там же, стр.72, выражение /4.17/]:

где α - угловая ошибка;
 и
и  - комплексные сигналы суммарного и разностного каналов;
- комплексные сигналы суммарного и разностного каналов;

 - комплексно сопряженные величины сигналов суммарного и разностного каналов;
- комплексно сопряженные величины сигналов суммарного и разностного каналов;
Re(... ) - действительная составляющая величины, заключенной в скобки.
Известно также устройство формирования угловой ошибки в когерентных РЛС с цифровой обработкой сигналов, блок-схема которого приведена на фиг.2 [А.И.Канащенков, В.И.Меркулов. Защита радиолокационных систем от помех. - М.: Радиотехника, 2003, стр.38].
Это устройство в суммарном и разностном каналах имеет по два приемных тракта, называемых квадратурными. Угловая ошибка α сигнала цели вычисляется в блоке оценки угловой ошибки после быстрого преобразования Фурье (БПФ), производимого раздельно с данными суммарного и разностного каналов. На входы блоков БПФ подаются массивы значений действительной и мнимой составляющих суммарного сигнала (
 ) и массивы значений действительной и мнимой составляющие разностного сигнала (
) и массивы значений действительной и мнимой составляющие разностного сигнала (
 ). Каждая из этих составляющих формируется своим приемным трактом.
). Каждая из этих составляющих формируется своим приемным трактом.
Угловая ошибка α сигнала цели вычисляется после БПФ для той частоты ωi (i-го значения массива сигналов на выходе БПФ, называемых выходами или отсчетами БПФ), на которой имеется сигнал в суммарном канале. Выполняя преобразования соотношения (1), получим

Обозначая значения сигнала на выходе БПФ для суммарного и разностного каналов соответственно через СΣ , СΔ , перепишем выражение для угловой ошибки α :

где
ReCΣ , ImС∑ - действительная и мнимая составляющие выходного сигнала БПФ суммарного канала;
RеСΔ , ImСΔ - действительная и мнимая составляющие выходного сигнала БПФ разностного канала.
Соотношение (2) используется в схеме фиг.2 для оценки угловой ошибки. Угловая ошибка вычисляется по составляющим i-го значения выходного массива сигналов БПФ, соответствующего частоте ω i., на которой обнаружена (наблюдается) цель.
При наличии источника шумового сигнала угловая ошибка α ш рассчитывается по соотношению (2a):

где 


 - действительная и мнимая составляющие шумового сигнала в суммарном и разностном каналах после БПФ на частоте ω i. В качестве частоты ω i обычно выбирается частота, на которой помеха в суммарном канале имеет максимальное значение. С целью уменьшения влияния флюктуаций для оценки угловой ошибки источника шума используется соотношение (3):
- действительная и мнимая составляющие шумового сигнала в суммарном и разностном каналах после БПФ на частоте ω i. В качестве частоты ω i обычно выбирается частота, на которой помеха в суммарном канале имеет максимальное значение. С целью уменьшения влияния флюктуаций для оценки угловой ошибки источника шума используется соотношение (3):

где i=k+1, k+2,... , k+n0 - группа из n0 частот, отбираемых из занимаемой помехой полосы частот. Задавая n0≥60 получают оценку угловой ошибки с приемлемым доверительным интервалом.
В практически используемых устройствах формирования угловой ошибки при использовании соотношений (2), (3) учитывается фазовая неидентичность характеристик каналов. Если фазовый сдвиг разностного канала относительно суммарного канала равен θ , то значения составляющих спектра разностного канала корректируются пересчетом следующим образом:


где 
 - составляющие спектра разностного канала, полученные на выходе блока БПФ разностного канала при фазовом рассогласовании разностного и суммарного каналов, равном θ .
- составляющие спектра разностного канала, полученные на выходе блока БПФ разностного канала при фазовом рассогласовании разностного и суммарного каналов, равном θ .
Устройство формирования угловой ошибки согласно схеме фиг.2 с вычислением угловой ошибки по соотношению (3) является прототипом предлагаемого изобретения.
Недостатком построения устройства формирования угловой ошибки по схеме фиг.2 является необходимость наличия двух приемных трактов (включая ВЧ-приемник, фазовый детектор, фильтр нижних частот, АЦП, сумматор) и в суммарном, и в разностном канале, что вызывает ухудшение массогабаритных характеристик. Это может оказаться неприемлемым в случае жестких ограничений по массе и габаритам, что имеет место в бортовых авиационных системах.
Задача изобретения - снижение массы и габаритов устройства формирования угловой ошибки сигнала помехи.
Поставленная задача решается в предлагаемом изобретении, блок-схема которого приведена на фиг.3, за счет использования только одного приемного тракта в суммарном и разностном каналах, одного блока БПФ для одновременного преобразования сигналов суммарного и разностного каналов, каждый из которых представлен только действительной частью, и введения блока оценки угловой ошибки, в котором эта ошибка находится по соотношению, учитывающему наличие только действительных составляющих сигналов на входах БПФ.
На фиг.1 представлена блок-схема устройства формирования сигнала ошибки в моноимпульсной РЛС.
На фиг.2 представлена блок-схема устройства формирования угловой ошибки в моноимпульсной РЛС с цифровой обработкой информации (прототип).
На фиг.3 представлена блок-схема предлагаемого изобретения.
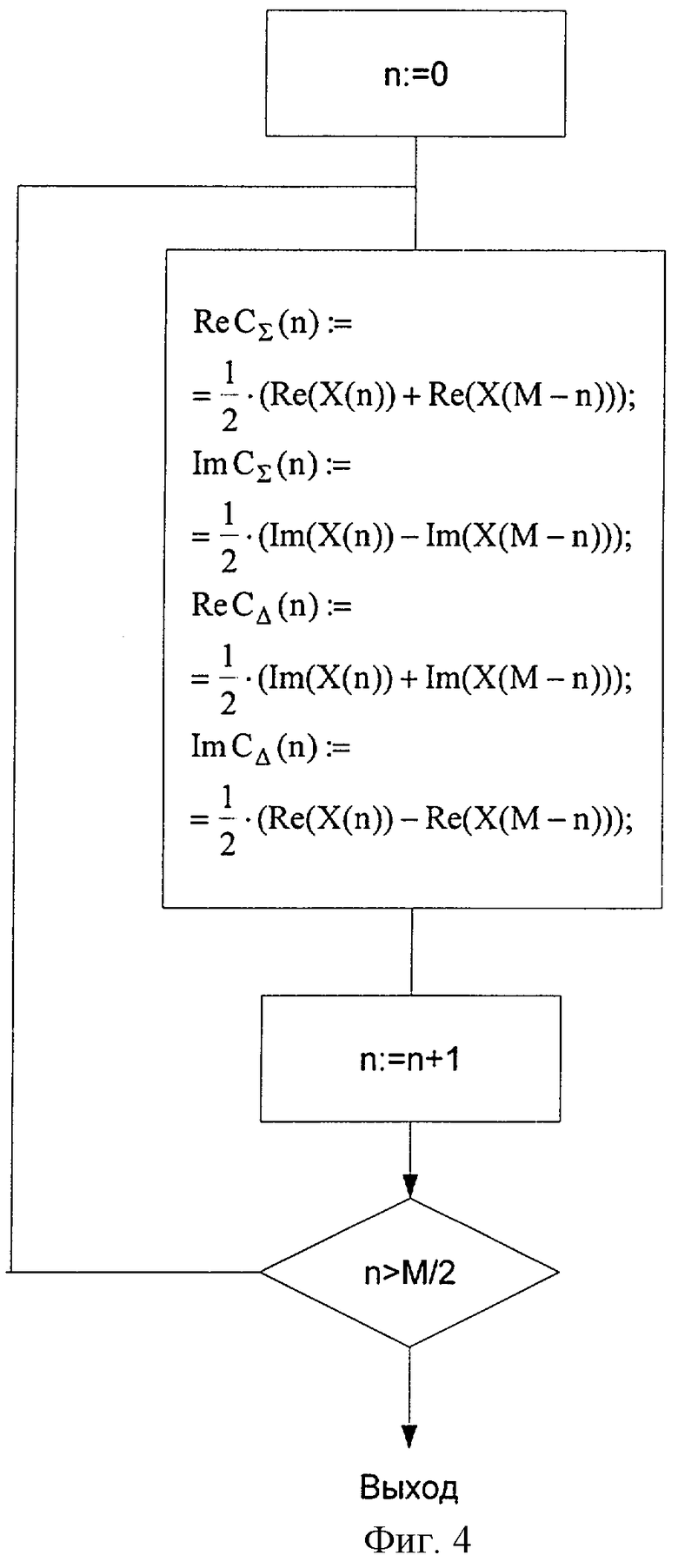
На фиг.4 представлена блок-схема алгоритма блока восстановления составляющих.
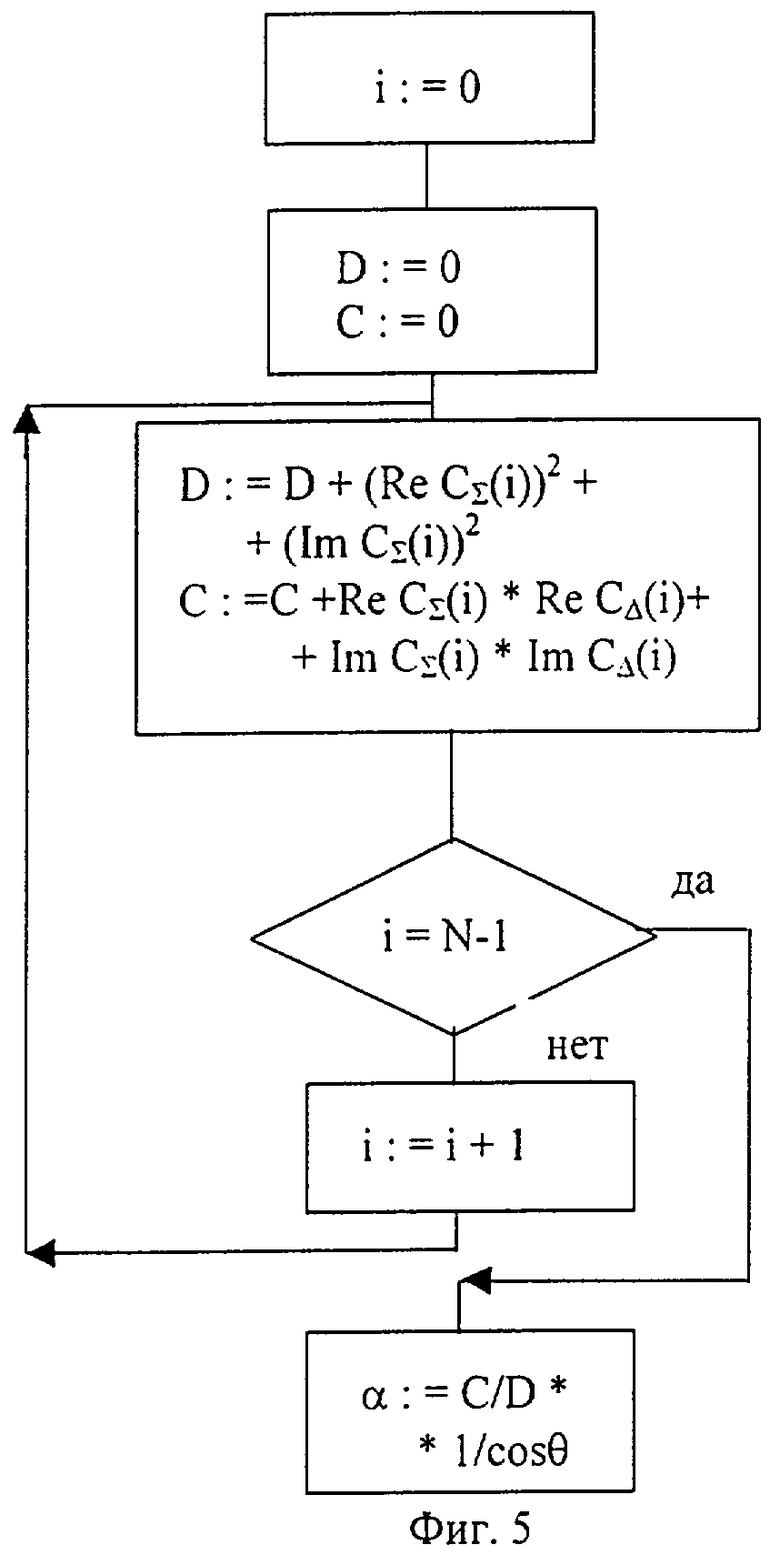
На фиг.5 представлена блок-схема алгоритма блока оценки угловой ошибки.
Устройство формирования угловой ошибки при приеме шумового сигнала содержит моноимпульсную антенну 1, генератор опорного сигнала 2, высокочастотный (ВЧ) приемник суммарного канала 3, фазовый детектор суммарного канала 4, фильтр нижних частот суммарного канала 5, аналого-цифровой преобразователь (АЦП) суммарного канала 6, сумматор суммарного канала 7, ВЧ-приемник разностного канала 8, фазовый детектор разностного канала 9, фильтр нижних частот разностного канала 10, АЦП разностного канала 11, сумматор разностного канала 12, блок быстрого преобразования Фурье (БПФ) 13, блок восстановления составляющих сигналов суммарного и разностного каналов 14, двухполюсный переключатель 15, генератор тестового сигнала 16, блок оценки фазового рассогласования 17, блок запоминания фазового рассогласования 18, блок управления 19, первый переключатель 20, второй переключатель 21, блок оценки угловой ошибки 22, выход которого является выходом устройства.
Входящие в предлагаемое изобретение стандартные элементы бл. 1-12 используются в соответствии со своим назначением [А.И.Канащенков, В.И.Меркулов. Защита радиолокационных систем от помех. - М.: Радиотехника, 2003, стр.37, 39].
Бл.13 выполняет преобразование БПФ [Введение в цифровую фильтрацию. Под ред. Р.Богнера и А.Костантинидиса. - М.: МИР, 1976, стр.116-121]. Блок БПФ имеет два входа. На один из них (вход действительных составляющих) должен подаваться массив действительных составляющих выборки сигнала, а на второй (вход мнимых составляющих) - массив мнимых составляющих той же выборки. В предлагаемом устройстве на каждый из двух входов блока БПФ подается по массиву из М-величин каждый, один из которых является действительными составляющими выборки сигналов суммарного канала, а второй - действительными составляющими выборки сигналов разностного канала. Если при выполнении БПФ с подачей на входы блока БПФ действительной и мнимой составляющих одного и того же сигнала получаемые на выходе блока БПФ отсчеты представляют спектр этого сигнала, то при подаче на входы блока БПФ двух действительных составляющих двух разных сигналов на выходе получаются отсчеты, являющиеся комбинацией составляющих спектра сигналов, поданных на вход своими действительными частями. В соответствии с [Введение в цифровую фильтрацию. Под ред. Р.Богнера и А.Костантинидиса. - М.: МИР, 1976., стр.128-131] получаемые в данном случае на выходе блока БПФ действительные и мнимые составляющие отсчетов БПФ (действительные и мнимые составляющие спектра) позволяют найти действительные и мнимые составляющие спектра каждого из входных сигналов, которые подавались на вход блока БПФ своими действительными частями.
Восстановление составляющих спектра суммарного и разностного каналов выполняет бл.14. Обозначая Х(n) выходные значения преобразования БПФ, в соответствии с [там же, стр.131, соотношение (7.23)] действительная и мнимая составляющие спектра суммарного и разностного каналов находятся по соотношениям:




где n=0, 1, 2,... , М/2
Алгоритм реализации бл.14 приведен на фиг.4. После операции восстановления получаем массивы ReCΣ , ImCΣ , РеСΔ , ImСΔ . по М/2 величин каждый. Полученные в бл.14 составляющие спектра через двухполюсный переключатель поступают в бл.17 или в бл.22.
Предлагаемое устройство формирования угловой ошибки при приеме шумового сигнала потребовало решения проблем, связанных с отказом от вторых приемных трактов. Известно, что при подаче на вход БПФ только действительной составляющей преобразуемой величины выходной спектр обладает свойством комплексно-сопряженной симметрии [Введение в цифровую фильтрацию. Под ред. Р.Богнера и А.Костантинидиса. - М.: МИР, 1976, стр.128]:

где Xi - комплексный сигнал i-го выхода БПФ;
 - комплексно-сопряженная величина (M-i)-му выходу БПФ;
- комплексно-сопряженная величина (M-i)-му выходу БПФ;
М - число точек БПФ;
i=0, 1, 2,... , M-1.
При этом выходные сигналы БПФ приобретают следующее свойство:

где ReXi, ImХi - действительная и мнимая составляющие i-го выхода блока БПФ (получаемые на выходе БПФ составляющие сигнала частоты ω i);

 - принятые сигналы, соответствующие частотам ω i и ω M-i.
- принятые сигналы, соответствующие частотам ω i и ω M-i.
Указанное свойство не затрудняет формирование угловой ошибки по одной цели, поскольку, зная доплеровский диапазон частот цели, можно выбрать параметры БПФ так, чтобы сигналы всех реальных целей лежали в диапазоне ω0≤ωi<ωM/2, и тогда 
 (при этом приходится работать с М/2 выходами БПФ). В этом случае в соответствии с соотношениями (4) составляющие ReXi, ImXi будут являться составляющими сигнала цели, что позволит по соотношению (2) найти угловую ошибку сигнала цели.
(при этом приходится работать с М/2 выходами БПФ). В этом случае в соответствии с соотношениями (4) составляющие ReXi, ImXi будут являться составляющими сигнала цели, что позволит по соотношению (2) найти угловую ошибку сигнала цели.
При пеленгации источника шума, полоса частот которого перекрывает всю полосу частот приема, сигнал шумовой помехи присутствует на всех частотах, поэтому в соответствии с соотношением (4) действительная и мнимая составляющие каждого выходного сигнала БПФ являются суммой составляющих двух входящих сигналов. Вследствие этого вычисление сигнала угловой ошибки источника шума по соотношениям (2a) и (3) приведет к неверному результату.
Соотношение для вычисления угловой ошибки в предлагаемом изобретении получено следующим образом.
Пусть на вход моноимпульсной антенны приходит непрерывная шумовая помеха со средним значением m=0 и среднеквадратичным отклонением σ =σ вх. Полоса частот, перекрываемая шумовой помехой, больше Fп (Fп - частота повторения РЛС).
Для случая приемного тракта с одной квадратурой сигнал помехи на входе АЦП суммарного канала может быть представлен выражением (5)
где М - число точек массива входных данных (число точек БПФ).
Соответственно на входе АЦП разностного канала помеху можно представить выражением (6),

где Vi - случайная величина, распределенная по Релею;
ϕ i - случайная фаза, равномерно распределенная на интервале 0-2π ;
α - угловая ошибка (величина, функционально связанная с углом между осью антенны и направлением на источник помехи);
θ - фазовый сдвиг, возникающий при прохождении сигнала по суммарному и разностному каналам из-за аппаратурной неидентичности каналов (фазовое рассогласование каналов);



k, i - целые числа
Сигналы из суммарного и разностного каналов поступают на когерентную обработку. В каждом канале реализовано 0,5 М фильтров, которые перекрывают полосу 0-0,5 Fп.
Рассмотрим, как сигнал Х с частотой ωi и сигнал Y с частотой ωM-i попадают в фильтр, настроенный на частоту ωi.
Согласно (5) можно записать:

Введем обозначения:


Тогда:

и

Учитывая (7), (8) и (9) и равенство ej·2·π·k=1 (k - целое число), можно записать: ω м-i=-ω i, и уравнение (10) можно записать в виде:

Введем следующие обозначения:

Тогда получим:

Из равенств (10) и (11) видно, что в полосе пропускания фильтра, настроенного на частоту ω i, действуют два исходных сигнала с частотами ω i и ω M-i.
После преобразования Фурье сигнал на выходе i-того фильтра суммарного канала (сигнал i-той частоты) записывается в виде:

В разностном канале на выходе i-того фильтра после преобразования Фурье аналогично получим:

учитывая, что


получим действительные и мнимые части сигналов на выходе i-того фильтра суммарного и разностного каналов:




Величины Ai·cosϕi, Вi·соsϕM-i, Ai·sinϕi, Bi· sinϕM-i - независимые случайные числа, распределенные по нормальному закону с m=0 и σ =σ вых.
Для того, чтобы определить α , вычислим величину G - среднее значение сумм произведений действительных и мнимых частей сигналов суммарного и разностного каналов:

где  а выражение в круглых скобках соответствует числителю соотношения (2).
а выражение в круглых скобках соответствует числителю соотношения (2).
Также найдем среднее значение квадрата модуля сигнала суммарного канала:

Учитывая, что величины





как сумма произведений независимых случайных величин, а средние значения произведений



равны дисперсии этих величин и равны между собой, окончательно получим:


Откуда

где 
В предлагаемом устройстве соотношение (24) реализуется блоком 22 в соответствии с алгоритмом, блок-схема которого дана на фиг.5.
Входящая в соотношение (24) величина фазового рассогласования суммарного и разностного каналов θ является постоянной на временном интервале оценки угловой ошибки и определяется предварительно по команде, формируемой блоком управления. Фазовое рассогласование находится при подаче на суммарный и разностный каналы одного и того же тестового сигнала. Шумовой сигнал при этом должен отсутствовать.
Для нахождения величины фазового рассогласования θ в соответствии с блок-схемой фиг.3 по управляющему сигналу, вырабатываемому блоком управления (бл.19), первый и второй переключатели ВЧ-сигналов (бл.20 и бл.21 соответственно) пропускают тестовый сигнал с генератора тестового сигнала (бл.16) на входы ВЧ-приемников суммарного и разностного каналов (соответственно блоки 3 и 8), а двухполюсный переключатель (бл.15) подает составляющие спектра сигналов на блок оценки фазового рассогласования (бл.17). В результате при наличии управляющего сигнала обеспечивается работа предлагаемого устройства в режиме измерения θ .
Блок управления, с помощью которого включается режим измерения фазового рассогласования, представляет собой устройство, которое при поступлении на его вход сигнала внешнего управления вырабатывает на выходе управляющий сигнал. Управляющий сигнал представляет собой электрический сигнал с заданными параметрами, например, постоянное напряжение N вольт, возникающее при замыкании имеющейся в бл.19 электрической цепи. Сигнал внешнего управления представляет внешнее воздействие, необходимое для замыкания цепи формирования выходного управляющего сигнала. Сигналом внешнего воздействия может быть включение напряжения, подаваемого на электронное реле, замыкающее указанную выше электрическую цепь в бл.19, или нажатие оператором тумблера, замыкающего эту цепь.
Переключатель представляет собой устройство, имеющее два сигнальных входа и управляющий вход, которое при подаче на управляющий вход управляющего сигнала пропускает на выход первый входной сигнал. При отсутствии на управляющем входе управляющего сигнала на выход подается второй входной сигнал. Возможные реализации переключателя ВЧ-сигналов приведены в [Конструирование и расчет полосковых устройств. Под ред. И.С.Ковалева. М.: Сов. радио, 1974, с.223-239].
Генератор тестового сигнала представляет собой генератор монохроматического сигнала постоянной частоты в диапазоне приема РЛС [И.С.Гоноровский. Радиотехнические цепи и сигналы. - М.: Радио и связь. 1986, стр.270-304], подающий один и тот же тестовый сигнал на оба приемных канала.
Для нахождения θ в предлагаемом устройстве производится обработка тестового сигнала суммарным и разностным каналами, выполняется БПФ над действительными составляющими сигналов суммарного и разностного каналов, восстанавливаются составляющие спектров сигналов суммарного и разностного каналов, которые через двухполюсный переключатель (бл.15) подаются на блок оценки фазового рассогласования (бл.17).
Двухполюсный переключатель представляет собой устройство, имеющее сигнальный и управляющий входы и два выхода, которое по управляющей команде переключает входной сигнал с одного выхода на другой [А.Флорес. Организация вычислительных машин. Пер. с английского. – М., 1972, с.20-26].
В бл.17 фазовое рассогласование (находится по соотношению 
где i - номер частоты, соответствующий тестовому сигналу.
Приведенное соотношение, реализуемое бл.17, учитывает фазы суммарного и разностного каналов, а также сдвиг на π /2, вносимый волноводным мостом при формировании разностного сигнала. Бл.17 может реализоваться в виде соответствующего приведенному соотношению алгоритма в вычислительной машине или в виде спецвычислителя, выполняющего расчет θ в соответствии с этим соотношением.
Полученное значение θ хранится в блоке запоминания фазового рассогласования (бл.18), представляющим собой ячейку памяти, схемное выполнение которой известно из литературы [А.Флорес. Организация вычислительных машин. Пер. с английского. - М., 1972, с.20-26].
Предлагаемое устройство фиг.3 работает следующим образом.
Шумовой сигнал, направление на который определяет угловую ошибку, принимается моноимпульсной антенной (бл.1). Бл.1 формирует на выходе две составляющие сигнала: суммарную ∑ и разностную Δ , которые через переключатели (суммарная составляющая через первый переключатель, разностная составляющая через второй переключатель), управляющий сигнал на которых в этот момент равен "0", подаются каждая на свой ВЧ-приемник (бл.3 и бл.8), где производится усиление сигнала. Сигнал с выхода каждого ВЧ-приемника (суммарного и разностного каналов) подается на вход своего фазового детектора ФД (бл.4, бл.9). На второй вход каждого ФД подается сигнал генератора опорного сигнала (бл.2). В результате работы ФД на его выходе формируется сигнал, имеющий составляющие с частотами, равными сумме и разности частот, подаваемых на вход. Для выделения разностной частоты выходной сигнал фазового детектора каждого канала подается на свой фильтр нижних частот (бл.5 в суммарном канале, бл.10 в разностном канале), который пропускает на свой выход только сигнал разностной частоты, являющийся доплеровской частотой. С выхода фильтра нижних частот сигнал доплеровской частоты подается на АЦП (бл.6 и бл.11), где преобразуется в цифровой вид. После каждого АЦП включен свой сумматор (бл.7 и бл.12), на котором преобразованные в цифровой вид значения сигнала суммируются на интервале, равном длительности импульса, обеспечивая тем самым согласованную фильтрацию импульсного сигнала. Сигналы с выхода сумматора суммарного канала с периодом следования зондирующих импульсов поступают на один из входов блока БПФ (бл.13), а сигналы с выхода сумматора разностного канала поступают на второй вход блока БПФ. Бл.13 таким образом обрабатывает две последовательности: действительную составляющую сигналов суммарного канала и действительную составляющую сигналов разностного канала. Выходные сигналы бл.13, являющиеся комбинацией спектров сигналов суммарного и разностного каналов, поступают на вход блока восстановления составляющих сигналов суммарного и разностного каналов (бл.14). В бл.14 в соответствии с алгоритмом фиг.4 вычисляются действительные и мнимые составляющие спектра суммарного и разностного каналов RеСΣ , ImСΣ , RеСΔ , ImСΔ .
Указанные составляющие в виде массива через двухполюсный переключатель (бл.15), на управляющем входе которого сигнал равен “0”, подаются на вход блока оценки угловой ошибки (бл.22), в котором угловая ошибка вычисляется в соответствии с алгоритмом фиг.5. На другой вход бл.22 поступает значение фазового рассогласования θ из бл.18., где это значение хранится после его определения в соответствии с изложенным ниже режимом работы устройства при нахождении фазового рассогласования (определение фазового рассогласования предшествует измерению угловой ошибки).
Работа устройства в режиме нахождения фазового рассогласования θ происходит следующим образом. При поступлении на вход блока управления (бл.19) сигнала внешнего управления на выходе этого блока вырабатывается управляющий сигнал.
Управляющий сигнал поступает на:
- управляющие входы первого и второго переключателей, которые при наличии управляющего сигнала пропускают на выход сигнал тестового генератора;
- управляющий вход двухполюсного переключателя, который при наличии управляющего сигнала подает на вход бл.17 восстановленные в бл.14 составляющие сигналов суммарного и разностного каналов.
Сигнал заданной постоянной частоты с генератора тестового сигнала через первый и второй переключатели поступает на входы ВЧ-приемников суммарного и разностного каналов. Обработка этого сигнала производится блоками 2-14, как это описано выше. С выхода бл.14 значения составляющих спектра тестового сигнала в суммарном и разностном канале поступают через двухполюсный переключатель (бл.15) в блок оценки фазового рассогласования (бл.17), где вычисляется значение θ . Найденное значение (поступает для хранения в блок запоминания фазового рассогласования (бл.18). Запомненное в бл.18 значение (используется в бл.22 при измерении угловой ошибки.
Вычисленное в бл.22 значение угловой ошибки подается на выход устройства.
Образец предлагаемого устройства формирования угловой ошибки при приеме шумового сигнала успешно прошел испытания и готов к промышленному использованию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ СИГНАЛОВ, ПРИНИМАЕМЫХ ПО БОКОВЫМ ЛЕПЕСТКАМ (ВАРИАНТЫ) | 2006 |
|
RU2319168C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С АВТОМАТИЧЕСКОЙ КАЛИБРОВКОЙ | 2008 |
|
RU2389038C2 |
| Способ обработки радиолокационных сигналов в моноимпульсной РЛС | 2017 |
|
RU2659807C1 |
| СУММАРНО-РАЗНОСТНЫЙ УГЛОВОЙ ДИСКРИМИНАТОР | 1991 |
|
RU2012015C1 |
| МОНОИМПУЛЬСНАЯ ТРЕХКАНАЛЬНАЯ СУММАРНО-РАЗНОСТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2005 |
|
RU2296347C2 |
| Способ обработки радиолокационных сигналов в моноимпульсной РЛС | 2016 |
|
RU2636058C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И МНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 1999 |
|
RU2152626C1 |
| МОНОИМПУЛЬСНАЯ СИСТЕМА СО СВЕРХРЕГЕНЕРАТИВНЫМ ОТВЕТЧИКОМ | 2007 |
|
RU2368916C2 |


Изобретение относится к радиолокации и может быть использовано в моноимпульсных импульсно-доплеровских радиолокационных станциях, в которых для обеспечения жестких требований по массе и габаритам в приемниках суммарного и разностного каналов имеется по одной квадратуре. В этом случае определение угловой ошибки направления на источник шумового излучения должно производиться с учетом особенностей получающегося спектра сигналов. В изобретении обосновано соотношение для оценки угловой ошибки направления на источник шумового излучения и дана схема устройства, реализующего оценку угловой ошибки в случае наличия одной квадратуры в приемных трактах каждого канала. Технический результат достигается за счет решения задачи определения угловой ошибки направления на источник шумового излучения в импульсно-доплеровских РЛС с одной квадратурой. 5 ил.

Устройство формирования угловой ошибки при приеме шумового сигнала, включающее моноимпульсную антенну, ВЧ-приемник суммарного канала, выход которого соединен с первым входом фазового детектора суммарного канала, выход которого подключен к последовательно соединенным фильтру нижних частот, аналого-цифровому преобразователю и сумматору суммарного канала, ВЧ-приемник разностного канала, выход которого соединен с первым входом фазового детектора разностного канала, выход которого подключен к последовательно соединенным фильтру нижних частот, аналого-цифровому преобразователю и сумматору разностного канала, генератор опорного сигнала, выход которого соединен со вторыми входами фазовых детекторов суммарного и разностного каналов, отличающееся тем, что введены последовательно соединенные блок быстрого преобразования Фурье (блок БПФ), вход действительных составляющих которого соединен с выходом сумматора суммарного канала, а вход мнимых составляющих которого соединен с выходом сумматора разностного канала, блок восстановления составляющих суммарного и разностного каналов, двухполюсный переключатель, последовательно соединенные блок оценки фазового рассогласования и блок запоминания фазового рассогласования, блок оценки угловой ошибки, выход блока восстановления составляющих суммарного и разностного каналов соединен с сигнальным входом двухполюсного переключателя, первый выход двухполюсного переключателя соединен с первым входом блока оценки угловой ошибки, второй выход этого переключателя соединен с блоком оценки фазового рассогласования, выход блока запоминания фазового рассогласования соединен со вторым входом блока оценки угловой ошибки, также введены генератор тестового сигнала, первый переключатель, второй переключатель и блок управления, суммарный выход моноимпульсной антенны соединен с первым входом первого переключателя, разностный выход моноимпульсной антенны соединен с первым входом второго переключателя, выход тестового генератора соединен со вторыми входами первого и второго переключателей, на вход блока управления подается сигнал внешнего управления, выход блока управления соединен с управляющими входами первого переключателя, второго переключателя и двухполюсного переключателя, выход первого переключателя соединен со входом ВЧ-приемника суммарного канала, выход второго переключателя соединен со входом ВЧ-приемника разностного канала, выход блока оценки угловой ошибки является выходом устройства.
| КАНАЩЕНКОВ А.И, МЕРКУЛОВ В.И | |||
| Защита радиолокационных систем от помех | |||
| - М.: Радиотехника, 2003, стр.38 | |||
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| US 4568940 А, 04.02.1986 | |||
| US 5175554 A, 29.12.1992 | |||
| ЦИФРОВОЙ ФАЗОМЕТР ДЛЯ ИЗМЕРЕНИЯ СРЕДНЕГО ЗНАЧЕНИЯ СДВИГА ФАЗ | 0 |
|
SU381038A1 |

