Июбрегение относится к управлению главными электроприводами одноковшовых экскаваторов и может быть использовано для управления кранами и другими механизмами, предназначенными для тяжелых условий эксплуатации
Целью июбретения является повышение производите,1ьности и надежности управления экскаватора
На чертеже изображена функциональная схема устройства, реализующего предлагае мый способ управления экскаватором
Сущность способа управления экскаватором заключается в следующем
Измеряют температуру электродвигателей главных электроприводов, сравнивают их значения с допустимыми, определяют рассогласование между ними, определяют наибольшее значение рассогласования и уменьшают значение максимальной скорости привода поворота пропорционально полученному наибольшему значению рассогласования
Устройство управления электроприводом состоит из электропривода 1 поворота, содержащего систему 2 управления, подключенную к преобразователю 3, питающему двигатель 4 Привод поворота управляется от командоаппарата 5 через дополнительный резистор 6, подключенный к системе 2 управления Нелинейный управляемый элемент 7 основными входами подключен параллельно дополнительному резистору 6 Электропривод 8 подъема управляется от командоаппарата 9 подъема, электропривод 10 напора (тяги) управляется от командоаппарата 11 напора (тяги) Первый термодатчик 12 установлен на преобразователе или двигателе привода 1 поворота, второй термодатчик 13 - на преобразователе или двигателе привода 8 подъема, третий термодатчик 14 - на преобразователе или двигателе привода 10 напора (тяги) Выходы первого 12, второго 13 и третьего 14 термодатчиков подключены соответственно к входам первого 15, второго 16 и третьего 17 пороговых элементов Выхо0
5
ды пороговых элементов связаны с входами узла 18 выделения наибольшего сигнала, выход которого подключен к управляющему входу нелинейного управляемого элемента 7
Пороговые элементы 15-17 имеют характеристику с зоной нечувствительности Величина зоны нечувствительности определяется допустимой температурой нагрева главных
5 электроприводов экскаватора Узел 18 выделения наибольшего сигнала пропускает на выход сигнал, наибольший из трех из поступающих на его входы Нелинейный логический элемент 7 при отсутствии сигнала на его управляющем входе имеет мини0 мальное сопротивление между основными входами Это сопротивление возрастает при появлении сигнала на его управляющем входе
Способ осуществляется с помощью устройства следующим образом
При работе экскаватора в легких условиях эксплуатации температура нагрева электрических главных электроприводов не превышает допустимую, определяемую классом изоляции этих машин Все 0 главные электроприводы, в том числе и электропривод поворота экскаватора, могут развивать максимальную скорость, задаваемую машинистом с помощью командоап- паратов 5, 9 и 11 Сигналы на выходах термодатчиков 12-14 не превышают при 5 этом значений зоны нечувствительности пороговых элементов 15-17 При этом напряжение на выходе узла 18 выделения наибольшего сигнала, а следовательно, и на управляющем входе нелинейного управляемого элемента 7 равно нулю Сопротивление между основными входами элемента 7 минимально, поэтому добавочной резистор 6 является зашунтированным На вход системы 2 управления привода 1 поворота при крайнем положении командоаппарата 5 поступает с максимальный сигнал, определяющий максимальное значение скорости механизма
Если в результате изменившихся условий эксплуатации температура электрических
машин каких-либо из главных приводов, например копающих механизмов, превысит допустимую, то в этом случае на выходе термодатчиков 13 и 14 появится напряжение, превышающее зону нечувствительности второго 16 и третьего 17 пороговых элементов. Узел 18 выделения наибольшего сигнала пропустит сигнал с термодатчика того электропривода, температура которого выше. Этот сигнал, пропорциональный перегреву электрических машин этого привода, поступит на управляющий вход нелинейного управляемого элемента 7. Сопротивление между основными входами этого элемента возрастет, и сигнал, поступающий с командоаппарата 5 на вход системы 2 управления привода подъема, уменьшится Это приведет к снижению максимального значения скорости привода поворота и, соответственно, к увеличению длительности транспортных операций.
Возрастание длительности транспортных операций приводит к снижению эффективного тока всех, в том числе и перегреваемого, электроприводов. Таким образом, уменьшение максимального значения скорости привода поворота обеспечивает адаптацию экскаватора к условиям эксплуатации без ухудшения управляемости экскаватора.
Формула изобретения
1. Способ управления электроприводом одноковшового экскаватора, основанный на измерении скорости перемещения привода поворота, измерении температур приводов
0
5
5
0
0
подъема, поворота и гяги, сравнении ти температур с допустимыми шачениями, определении рассогласования между текущими и допустимыми значениями температур, отличающийся тем, что, с целью повышения надежности управления и производительности экскаватора, из полученных рассогласований температур определяют максимальное значение, пропорционально которому уменьшают скорость перемещения привода поворота.
2 Устройство для управления электроприводом одноковшового экскаватора, содержащее узлы управления приводами подъема и тяги, соединенные с соответствующими командоаппаратами, узел управления приводами поворота, командоаппарат привода поворота, три термодатчика, установленных на электроприводах и пороговый элемент, отличающееся тем, что, с целью повышения надежности управления и прспм водительности одноковшового экскаватора, оно содержит узел выделения наиболыпе го сигнала, нелинейный управляемый элемент, резистор, второй и третий порого вые элементы, причем выход каждого термодатчика чере соответствующие пороговые элементы подключен к соответствующему входу блока выделения наибольшего сигнала, выход которого соединен с управляемым входом нелинейного управляемою элемента, включенного параллельно резистору, один выход которого подключен к выходу командоаппарата привода поворота, а другой вывод - к входу узла управления приводом поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления драглайном и устройство для его осуществления | 1986 |
|
SU1421836A1 |
| Способ адаптивного управления электроприводами одноковшового экскаватора | 1986 |
|
SU1410257A1 |
| Способ управления электроприводами одноковшового экскаватора | 1985 |
|
SU1294933A1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Способ управления электроприводами одноковшового экскаватора | 1976 |
|
SU615184A1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА ОДНОКОВШОВОГО ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2255184C1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Устройство для управления механизмом хода экскаватора | 1985 |
|
SU1271950A1 |
Изобретение относится к управлению главными электроприводами одноковшовых экскаваторов. Цель - повышение надежности управления и производительности экскаватора. Для этого измеряют температуру электродвигателей приводов подъема 8, поворота 1 и тяги 10 соответствующими термодатчиками 13. 12 и 14 и сравнива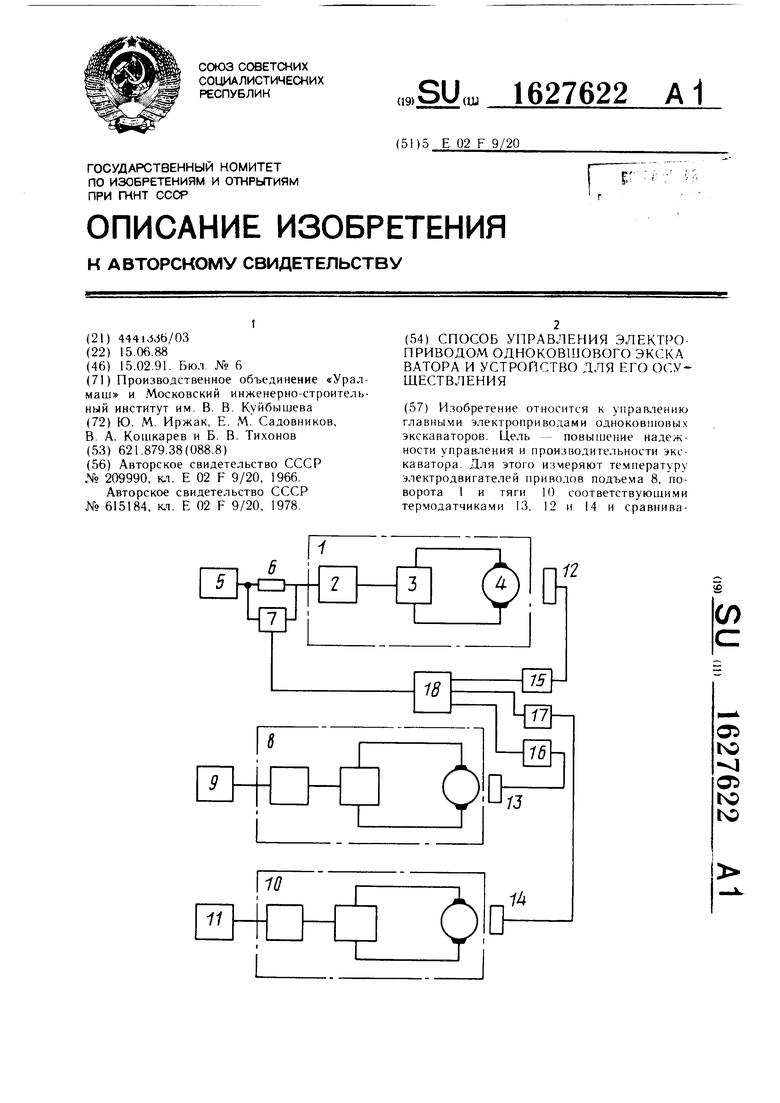
| Чесальная машина | 1966 |
|
SU209990A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления электроприводами одноковшового экскаватора | 1976 |
|
SU615184A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
