Изобретение относится к области автосервиса и предназначено для правки, в частности, алюминиевых дисков автомобильных колес в условиях даже небольшой мастерской автосервиса.
Известен "Станок для правки ободов колес легковых автомобилей" по описанию изобретения к а.с. СССР № 200406, кл. МПК В 21 d 1/08, опубликовано в БИ № 16, 09.10.1967 [1].
Данный станок позволяет производить правку ободов колес в сборе со ступицей и диском, для чего центральные правильные ролики, служащие дополнительными опорами для колеса в процессе правки его боковыми правильными роликами, выполнены фиксируемыми относительно колеса.
Данный станок для правки ободов колес смонтирован на сварной раме и приводится в движение электродвигателем через клиноременную передачу и червячный редуктор (см. описание изобретения и фиг.1,2,3).
Механизм зажима заготовок выполнен в виде головки, закрепленной на выходном валу редуктора. Головка состоит из пневмоцилиндра, при помощи пальца жестко связанного с клином. При перемещении клина перемещаются кулачки, фиксирующие обод колеса на ступице головки.
Центральные правильные ролики имеют профиль наружной поверхности обода колеса и при помощи рычагов шарнирно закреплены на раме станка. Между собой центральные правильные ролики кинематически связаны при помощи гидроцилиндра; в рабочем положении они фиксируются клиновым зажимом, приводимым в действие пневмоцилиндром. Правый и левый боковые ролики предназначены для правки внутренней поверхности обода колеса и приводятся в действие двумя гидроцилиндрами, работающими синхронно.
Гидравлический привод станка, помимо гидроцилиндров привода центральных и боковых роликов, включает гидравлический бак, насос, электродвигатель, редукционный клапан, гидрокраны и систему трубопроводов.
Исправляемое колесо устанавливают на головку. Подают воздух через кран в полость А пневмоцилиндра, кулачки разводятся и фиксируют колесо на головке. Включают механизм привода, и колесо приводится во вращение.
Включают гидравлический привод станка. Гидрокран устанавливают в рабочее положение. Рабочая жидкость, нагнетаемая насосом, поступает в полость Б гидроцилиндра, чем обеспечивается одновременный подвод к колесу двух центральных правильных роликов.
После окончания правки колеса по наружному профилю центральные правильные ролики фиксируются клиновым зажимом, для чего сжатый воздух подают в полость В пневмоцилиндра через кран.
Через гидрокран подают рабочую жидкость в полость Г гидроцилиндра левого ролика и в полость Д гидроцилиндра правого ролика. Обеспечивается правка внутреннего профиля колеса.
Недостатком данного станка является то, что процесс правки достаточно трудоемкий, поэтому производительность станка невысокая. Кроме этого, точность правки также невысокая и не очень стабильная, та,к как во многом зависит от квалификации оператора станка.
Целью при разработке и создании конструкции предлагаемого станка для правки дисков автомобильных колес является существенное повышение механизации и автоматизации технологического процесса правки дисков колес и на этой основе существенное повышение качества операции правки, а также повышение производительности труда.
Указанный технический результат достигается следующим образом. Предлагаемый станок для правки дисков автомобильных колес содержит как и аналог инструмент для правки обода диска колеса, установленные на станине станка электропривод с блоком электрического управления, механизм для установки на нем диска колеса, гидронасос и устройство управления работой станка. Но в отличие от аналога он снабжен переносным гидроцилиндром, на штоке которого укреплен инструмент для правки диска колеса, двумя откидными кронштейнами, предназначенными для опоры на них под различными углами относительно продольной оси диска колеса переносного гидроцилиндра, укрепленным на третьем кронштейне, установленном неподвижно на станине станка.
Кроме этого, станок снабжен линейным приводом с датчиком линейных перемещений, на котором укреплены, по меньшей мере, один источник оптических волн, предназначенный для облучения сканируемой поверхности обода диска колеса, и, по меньшей мере, один приемник отраженных от поверхности обода диска оптических волн, а также счетно-решающим устройством, соединенным с источником и приемником оптических волн и предназначенным для воспроизведения результатов сканирования поверхности обода диска колеса на экране устройства индикации в виде геометрических размеров и/или изображения поверхностей обода диска, датчиком угловых перемещений диска колеса, устройством индикации геометрических размеров и фактического профиля обода диска, при этом в качестве механизма установки на нем диска колеса использованы шпиндель с планшайбой, гидронасос соединен с переносным гидроцилиндром, датчик угловых перемещений диска колеса установлен на шпинделе и соединен со счетно-решающим устройством, которое также соединено с устройством индикации.
А счетно-решающее устройство выполнено с возможностью управления перемещениями штока переносного гидроцилиндра вместе с инструментом для правки диска колеса на расчетную величину и в соответствии с рассчитанным вектором приложения усилия правки к конкретному месту дефекта на ободе диска колеса, подлежащего правке.
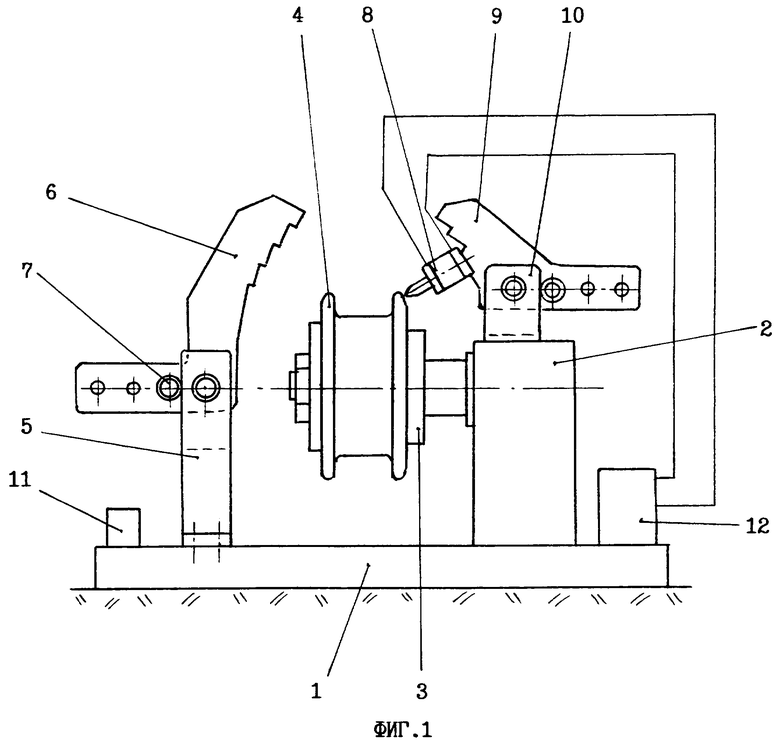
На фиг.1 изображен схематично станок-аналог.
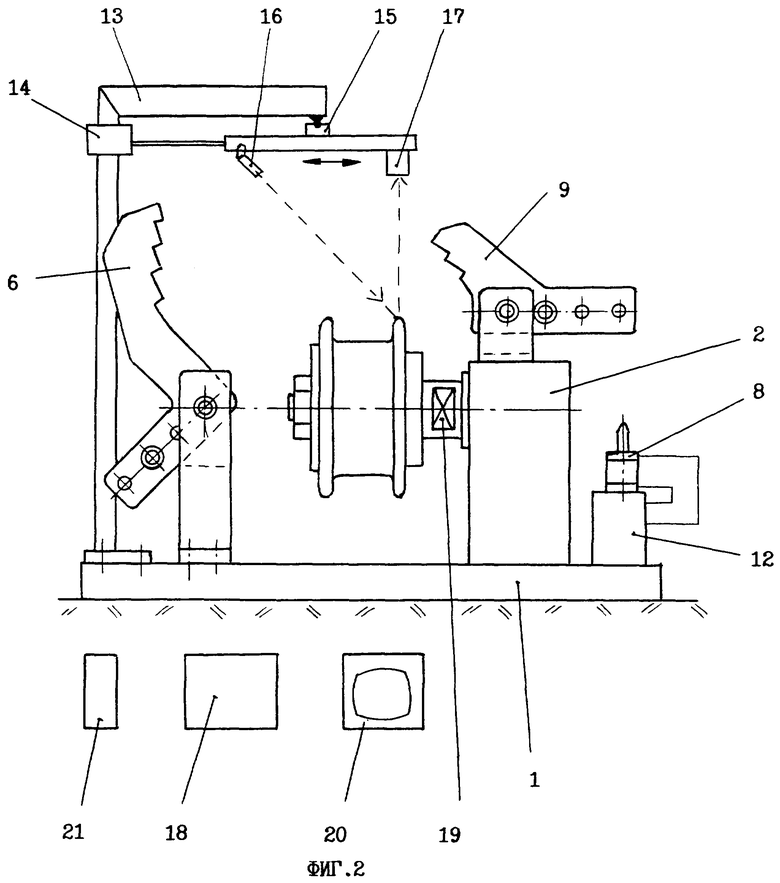
На фиг.2 изображена структурная схема предлагаемого станка для правки дисков автомобильных колес.
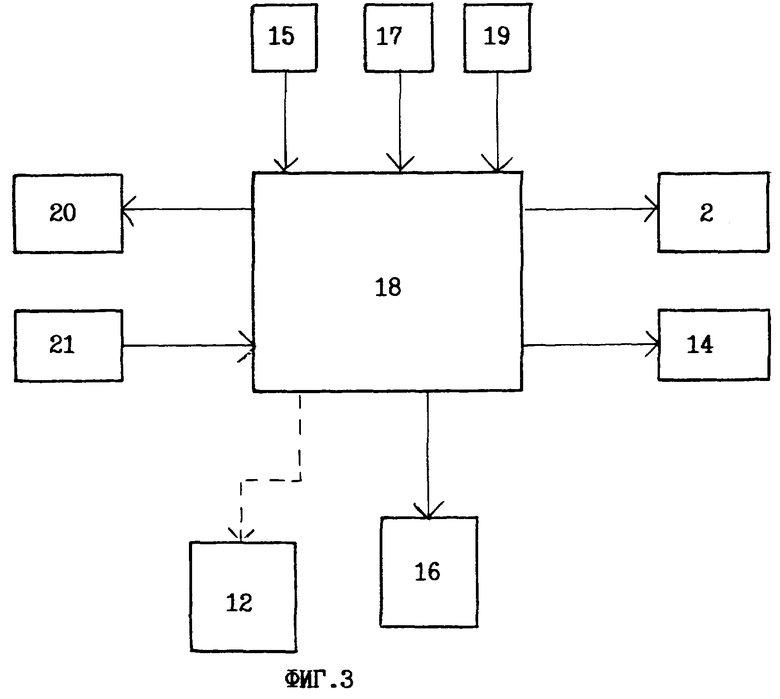
На фиг.3 изображена функциональная схема предлагаемого станка.
Предлагаемый станок для правки автомобильных колес содержит следующие агрегаты, узлы и детали.
На станине 1 неподвижно укреплена коробка передач 2 с электроприводом и шпинделем 3 с планшайбой. На планшайбе 3 укреплен обрабатываемый диск колеса 4. Слева на станине 1 неподвижно укреплена стойка 5 с пазом, в котором установлен откидной и съемный кронштейн 6, который фиксируется в пазу посредством двух штырей 7, один из которых удерживает шарнирно кронштейн в пазу, а другой штырь 7 фиксирует его от проворота вокруг первого штыря 7, упираясь в торец стойки 5 (фиг.1 и 2).
Откидной кронштейн 6 предназначен для опоры в нем на уступах, расположенных под заданным углом друг к другу, переносного гидроцилиндра 8, на штоке которого укреплен инструмент для правки обода диска колеса. Опираясь на различные уступы в откидных кронштейнах 6 и 9 гидроцилиндр устанавливается под определенным углом к продольной оси диска колеса и обеспечивает оптимальный угол приложения усилия инструментом для исправления, например, вмятины на ободе диска колеса.
Кронштейн 9 устанавливается в две неподвижные проушины 10 и фиксируется аналогично, как и кронштейн 6. На станине установлено устройство 11 управления станком. Переносной гидроцилиндр 8 соединен с гидронасосом 12.
Описанная конструкция по фиг.1 представляет собой конструкцию станка-аналога.
Предлагаемая конструкция станка содержит дополнительно установленный неподвижно на станине 1 кронштейн 13, на котором укреплен линейный привод 14, который, в свою очередь, соединен с подвижной линейкой датчика линейных перемещений 15, который также неподвижно укреплен на кронштейне 13.
На подвижной линейке датчика линейных перемещений 15 неподвижно укреплен датчик (излучатель) оптических волн 16, в качестве которого можно использовать лазерный излучатель, а в предлагаемом станке использован лазерный излучатель, оборудованный дифракционными решетками. При этом излучение будет иметь вид линии. При использовании нескольких лазерных излучателей длина сканируемой поверхности будет увеличиваться соответственно скорости восстановления (правки) деформированной поверхности обода диска колеса.
На подвижной линейке датчика линейных перемещений 15 укреплен также приемник (датчик) оптических волн 17, который принимает отраженные от поверхности обода диска колеса оптические волны, излучаемые датчиком оптических волн 16. В качестве приемника оптических волн 17 может быть использована твердотельная полупроводниковая видеокамера, которая подсоединена к счетно-решающему устройству (СРУ) 18, например персональному компьютеру.
Приемник оптических волн 16 улавливает отраженные от поверхности обода диска колеса кванты света, поступающие от излучателя оптических волн 16, и вводит информацию об интенсивности отраженного света в память СРУ 18. Излучатель оптических волн 16 также подсоединен к СРУ 18.
На шпинделе 3 станка укреплен датчик угловых перемещений 19 (поворота) диска колеса, предназначенный для ввода информации о текущем угле поворота диска колеса в СРУ 18.
Датчик линейных перемещений 15 предназначен для ввода информации о перемещении излучателя оптических волн 16 и приемника оптических волн 17, укрепленных на подвижной линейке этого датчика, относительно диска колеса (станины станка), а информация о значениях этого перемещения непрерывно поступает в СРУ 18.
Линейный привод 14 предназначен для линейного перемещения подвижной линейки датчика линейных перемещений 15 с укрепленными на ней излучателем оптических волн 16 и приемником оптических волн 17.
Из СРУ 18 вся поступившая информация после обработки ее по заданной программе поступает на устройство индикации 20, в качестве которого используется дисплей СРУ 18.
В качестве устройства управления 21 станком используется обыкновенный кнопочный пульт управления, подсоединенный к СРУ 18. К СРУ 18 подсоединена также система управления электроприводом 2 и система управления гидронасосом 12 (фиг.2 и 3).
Предлагаемый станок для правки дисков автомобильных колес работает следующим образом.
Оператор станка закрепляет диск колеса 4 на планшайбе 3 станка. Затем на пульте управления 21 он нажимает на клавишу “пуск”. После этого СРУ 18 выдает команду на запуск электродвигателя 2 станка. Далее СРУ 18 выдает команду на линейный привод 14 и соответственно на перемещение в крайнее правое положение подвижной линейки датчика линейных перемещений 15 вместе с излучателем оптических волн 16 и приемником оптических волн 17 (фиг.2 и 3).
СРУ 18 ожидает, когда вращение шпинделя 3 будет равномерным (например, 10 об/мин). После этого программа СРУ 18 выдает команду на включение в работу излучателя оптических волн 16 и приемника оптических волн 17 (фиг.3).
В результате этого в память СРУ 18 начинает поступать информация о значениях отраженных оптических лучей от поверхности обода диска 4 или поверхности шпинделя-планшайбы станка. СРУ 18 производит цифровую фильтрацию кадра, полученного с приемника отраженных лучей 17, и производит бинаризацию кадра с целью уменьшения объема, занимаемого картинкой, и записывает данную информацию в память СРУ 18 в зависимости от значения датчика угловых перемещений 19 диска колеса и датчика линейных перемещений 15 (“картинки”, индексированные в зависимости от угла поворота и линейного перемещения подвижной линейки датчика 15).
После того, как диск колеса произведет один полный оборот, включается линейный привод 14, и далее информация о “картинках” вводится в память СРУ 18 по спирали, фактически СРУ 18 запоминает матрицы сечений поверхностей диска колеса вида I(x,y),
где Ix, y - элемент матрицы со значением 0 или 1;
х - координата пиксела по горизонтали;
у - координата пиксела по вертикали.
СРУ 18 запоминает 1* х ϕ* матрицы I(x,y),
где 1* - дискретное 1;
ϕ* - дискретное ϕ.
По завершении сканирования заданной поверхности обода диска линейный привод 14 выключается (останавливается), а диск колеса со шпинделем производит еще один полный завершающий оборот. На этом сканирование поверхности обода диска заканчивается.
“Картинки”, находящиеся в памяти СРУ 18 при сканировании лазером, оборудованным дифракционной решеткой, являются фактически сечениями поверхностей диска колеса в зависимости от углового и линейного расположения.
После завершения процесса сканирования поверхности диска колеса СРУ 18 запускает другую программу, которая получает матрицу вида R(ϕ,1), из множества матриц I1*, ϕ*(х, у),
где R - радиус диска (элемент матрицы);
ϕ - угол поворота диска колеса;
1 - расстояние плоскости сечения диска колеса от заданной базы.
В матрице R(ϕ,1) имеются значения Rϕ,1, которые говорят о геометрических размерах диска колеса, а отклонения от значений Rϕ,1 при 1=const говорят о “загнутости” (деформированности) обода диска колеса в заданном сечении 1.
Программа СРУ 18 вычерчивает на экране устройства индикации 20 несколько величин:
- график среднего отклонения R от текущего положения угла ϕ;
- график радиусности (вывод элементов матрицы R(ϕ,1) цветом) по изменению цвета вертикального сечения оператор станка судит о деформации обода диска колеса в данном конкретном сечении;
- трехмерное изображение поверхности диска колеса в зависимости от ϕ.
Полученная на экране информация позволяет оператору визуально и достаточно легко определить место дефекта на ободе диска колеса и соответственно определить точку приложения усилия правки гидроцилиндром с инструментом для правки.
СРУ 18 предлагаемого станка может обеспечивать автоматическую выдачу информации для оператора о рассчетной величине и векторе приложения усилия правки к конкретным местам дефектов на ободе диска колеса, подлежащих правке.
Оператору достаточно установить диск колеса на расчетный угол поворота ϕ и приложить инструмент с гидроцилиндром в указанную точку под заданным углом (вектором) относительно оси диска колеса.
Далее оператор нажимает на клавишу пуск на пульте управления, и гидроцилиндр перемещает поршень с инструментом для правки на расчетную длину хода поршня, а гидроцилиндр неподвижно установлен в этот момент в один из уступов в кронштейне 6 или 9.
Таким образом, предлагаемый станок максимально автоматизирован, оператор выполняет практически простейшие операции и манипуляции при осуществлении процесса правки диска колеса, при этом с высокой точностью и производительностью. А квалификация оператора может быть и невысокой.
Источники информации
1. Станок для правки алюминиевых дисков автомобильных колес фирмы “НАТКО”, http: // www.НАТКО.СОМ.
Изобретение относится к области автосервиса и предназначено для правки, в частности, алюминиевых дисков автомобильных колес в условиях даже небольших мастерских автосервиса. Технический результат - повышение качества правки и производительности труда. Сущность изобретения заключается в следующем. Станок содержит установленные на станине электропривод с блоком электрического управления, шпиндель с планшайбой для установки на ней обрабатываемого диска колеса, суппорт с инструментом для правки, гидронасос с подсоединенным к нему переносным гидроцилиндром, на штоке которого укреплен инструмент для правки обода диска колеса, два откидных кронштейна, предназначенных для опоры на них под различными углами относительно продольной оси диска колеса переносного гидроцилиндра. На станине станка на укрепленном неподвижно кронштейне укреплен линейный привод с датчиком линейных перемещений, на котором укреплены, по меньшей мере, один источник оптических волн, предназначенный для облучения сканируемой поверхности обода диска колеса и, по меньшей мере, один приемник отраженных от поверхности обода диска оптических волн, и они соединены со счетно-решающим устройством, предназначенным для воспроизведения по заданной программе результатов сканирования поверхности обода диска на экране устройства индикации в виде геометрических размеров и/или поверхностей обода диска, а также установленный на шпинделе станка датчик угловых перемещений диска колеса, соединенный со счетно-решающим устройством, и соединенное со счетно-решающим устройством - устройство индикации геометрических размеров и фактического профиля обода диска колеса. 1 з.п. ф-лы, 3 ил.
| СТАНОК ДЛЯ ПРАВКИ ОБОДОВ КОЛЕС ЛЕГКОВЫХ АВТОМОБИЛЕЙ | 0 |
|
SU200406A1 |
| RU 2062153 С1, 20.06.1996 | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Усилитель класса @ | 1982 |
|
SU1116529A1 |

