Изобретение относится к шпалоподбивочной машине для подбивки шпал рельсового пути, имеющей собственную раму, опирающуюся на два ходовых механизма и проходящую в продольном направлении машины, и раму для агрегатов, которая расположена между ходовыми механизмами и выполнена с возможностью передвижения по пути при помаши ходового механизма и соединена с рамой машины при помощи крепления для рамы с возможностью сдвига в продольном направлении и имеет между ходовым механизмам и креплением для рамы шпалоподбивочный агрегат, выполненный с возможностью перемещения по высоте, а также путеподъемный агрегат.
Подобные шпалоподбивочные машины, непрерывно продвигающиеся при выполнении работ, известны, например, из патентов US 4655142 или US 5515788. При этом особое преимущество заключается в том, что рама машины, имеющая значительно большую массу, не должна останавливаться у каждой подбиваемой шпалы, а затем сразу снова разгоняться. Постепенное продвижение вперед ограничивается рамой, на которой установлены рабочие агрегаты и которая связана с рамой машины и выполнена с возможностью перемещения относительно нее.
Задачей предложенного изобретения является создание машины указанного типа, с помощью которой можно без проблем подбивать также и участки, имевшие закругления пути.
Согласно изобретению эта задача решается при помощи машины указанного типа за счет того, что крепление для рамы расположено перпендикулярно продольному направлению машины на раме машины с возможностью сдвига и соединено с приводом поперечной подачи, соединенным шарниром с рамой машины. Это решение подходит, в частности, для шпалоподбивочных агрегатов, предназначенных для одновременной подбивки нескольких шпал. Благодаря сдвигу рамы для агрегатов в поперечном направлении теперь есть возможность устанавливать шпалоподбивочный агрегат оптимально по центру относительно рельсов даже на кривых пути.
Прочие выгоды и формы выполнения изобретения даны в зависимых пунктах формулы и представлены на чертежах.
Изобретение поясняется ниже более подробно при помощи примеров выполнения, представленных на чертежах.
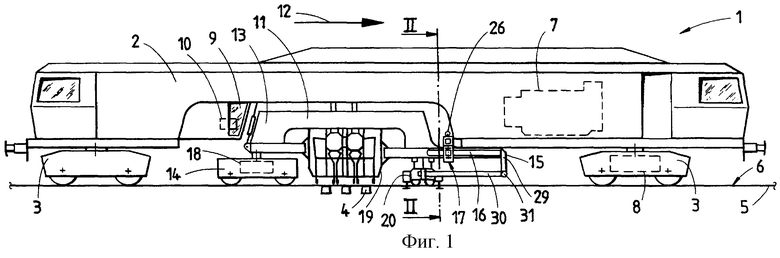
Фиг.1 - упрощенный вид сбоку шпалоподбивочной машины,
фиг.2 - увеличенный вид машины в поперечном сечении согласно линии сечения II-II на фиг.1,
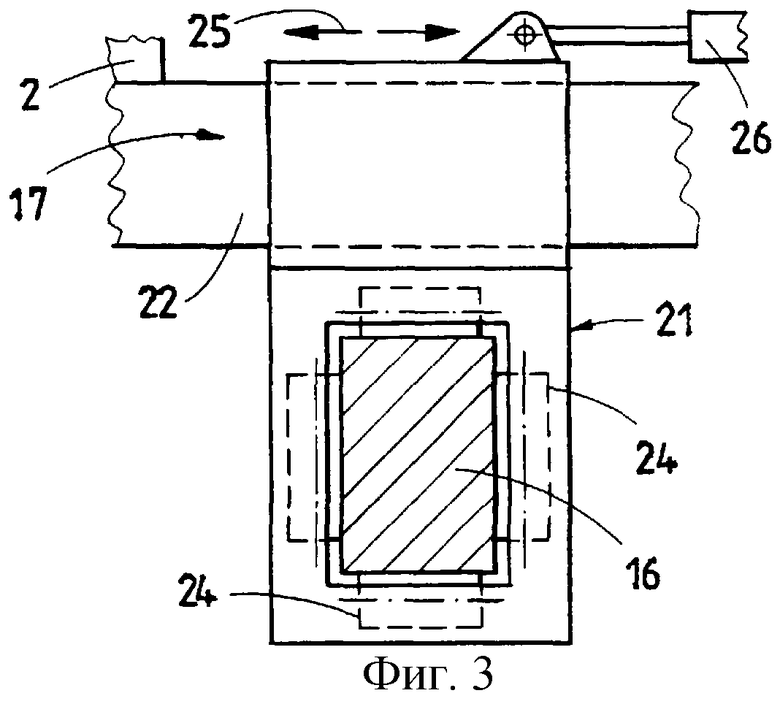
фиг.3 - вариант соединения рамы для агрегатов с рамой машины,
фиг.4 - схематичный вид сверху шпалоподбивочной машины,
фиг.5, 6 - схематичный вид путеподъемного агрегата и крепления для рамы.
Шпалоподбивочная машина 1, представленная на фиг.1, имеет собственную раму 2, которая имеет на концах ходовые механизма 3 и выполнена с возможностью передвижения по пути 6, состоящему из шпал 4 и рельсов 5. К тому же машина оснащена двигателем 7 и приводом движения 8. В рабочей кабине 9 находится устройство управления 10.
Между обоими ходовыми механизмами 3 рамы машины 2 расположена рама для агрегатов 11, которая имеет на заднем - если смотреть в рабочем направлении или продольном направлении машины 12 - конце 13 ходовой механизм 14. На переднем конце 15 предусмотрены две опоры рама 16, разнесенные между собой в поперечном направлении машины и установленные в креплении для рамы 17 с возможностью сдвига в продольном направлении. Непосредственно перед ходовым механизмам 14, имеющим привод движения 18, предусмотрен шпалоподбивочный агрегат 19, который предназначен для одновременной подбивки трех шпал 4. Перед шпалоподбивочным агрегатом 19 предусмотрен путеподьемный агрегат 20, оба агрегата 19, 20 соединены с рамой для агрегатов 11 с возможностью перемещения по высоте.
Как видно на фиг.2, крепление для рамы 17 состоит из двух подшипников скольжения 21, разнесенных между собой в поперечном направлении машины и соединенных между собой жесткой поперечиной 22. Она расположена с возможностью сдвига в поперечном направлении и в других подшипниках скольжения 23, которые соединены с рамой машины 2. Первые подшипники скольжения 21 имеют скользящие ролики 24 для сдвига опоры рамы 16 в продольном направлении машины 12. Сдвиг крепления для рамы 17 в поперечном направлении машины 25 происходит при помощи привода поперечной подачи 26, который соединен на шарнирах, во-первых, с рамой машины 2 (или подшипником скольжения 23), а во-вторых, с жесткой поперечиной 22.
Обе опоры рамы 16, разнесенные между собой в поперечном направлении машины, соединены между собой поперечной балкой 29, с которой шарниром 31, работающим во все стороны, соединена толкающая штанга 30, соединенная с путеподъемным агрегатом 20. Если смотреть в продольном направлении машины 12, то подшипники скольжения 21 расположены между поперечной балкой 29 и путеподъемным агрегатом 20 (фиг.1).
На фиг.3 представлено только альтернативное выполнение крепления для рамы 17, когда подшипники скольжения 21, подпирающие опору рамы 16, расположены с возможностью поперечного сдвига на жесткой поперечине 22, которая соединена на конце с рамой машины 2.
Как видно на фиг.4, благодаря поперечному сдвигу крепления для рамы 17 и тем самым также и рамы для агрегатов 11, обеспечивается то, что и на кривых пути гарантировано оптимальное согласование шпалоподбивочного агрегата 19 с направлением пути для оптимальной подбивки шпал.
На фиг.5 и 6 показано устройство управления 28, связанное с приводом поперечной подачи 26 и измерительным устройством 27. Измерительное устройство 27 в виде потенциометра с канатной тягой, укрепленное на путеподъемном агрегате 20, служит для регистрации пути поперечного сдвига между путеподьемным агрегатом 20 и креплением для рамы 17. Также можно использовать бесконтактное измерительное устройство 27.
Как только на кривой пути измерительное устройство 27 зарегистрировало путь поперечного сдвига а (см. фиг.5), устройство управления 28 автоматически приводит в действие привод поперечной подачи 26. Это приводит к поперечному сдвигу рамы для агрегатов 11, до тех пор пока крепление для рамы 17 снова не встанет по центру над путеподъемным агрегатам 20 (или над рельсовым путем 6 в области крепления для рамы 17), а значение поперечного сдвига а не будет равно нулю (фиг.6).
| название | год | авторы | номер документа |
|---|---|---|---|
| ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2003 |
|
RU2256736C2 |
| МАШИНА И СПОСОБ ДЛЯ ПОДБИВКИ ШПАЛ РЕЛЬСОВОГО ПУТИ | 2003 |
|
RU2249644C1 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА С ПОВОРОТНОЙ РАБОЧЕЙ РАМОЙ | 2014 |
|
RU2667683C2 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2010 |
|
RU2437977C1 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2001 |
|
RU2195523C1 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2001 |
|
RU2228985C2 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА ДЛЯ УПЛОТНЕНИЯ ЩЕБЕНОЧНОГО БАЛЛАСТНОГО СЛОЯ РЕЛЬСОВОГО ПУТИ | 2015 |
|
RU2684882C2 |
| СПОСОБ И МАШИНА ДЛЯ ПОДБИВКИ ШПАЛ РЕЛЬСОВОГО ПУТИ | 2001 |
|
RU2225908C2 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА, КОМПОНОВКА МАШИН И СПОСОБ ПОДБИВКИ РЕЛЬСОВОГО ПУТИ | 1996 |
|
RU2124088C1 |
| СПОСОБ НЕПРЕРЫВНОЙ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2480552C1 |




Изобретение относится к шпалоподбивочной машине для подбивки шпал рельсового пути. Шпалоподбивочная машина имеет собственную раму и раму для агрегатов, которая расположена между ходовыми механизмами и выполнена с возможностью передвижения по пути при помощи ходового механизма и соединена с рамой машины при помощи крепления для рамы с возможностью сдвига в продольном направлении. Между ходовым механизмом и креплением для рамы расположены шпалоподбивочный агрегат, выполненный с возможностью перемещения по высоте, и путеподъемный агрегат. Крепление для рамы расположено перпендикулярно продольному направлению машины на раме машины с возможностью сдвига и соединено с приводом поперечной подачи, соединенным шарниром с рамой машины. Техническим результатом является создание машины, с помощью которой можно без проблем подбивать участки, имеющие закругления пути. 5 з.п. ф-лы, 6 ил.
| US 4655142 A, 07.04.1987 | |||
| ШПАЛОПОДБИВОЧНАЯ МАШИНА | 0 |
|
SU394978A1 |
| Передвижная выправочно-подбивочная машина | 1983 |
|
SU1259963A3 |
| US 5515788 A, 14.05.1996. | |||
