Область техники, к которой относится изобретение
Изобретение относится к способу определения положения и ориентации перемещающегося объекта с использованием магнитного поля, а также к устройству для осуществления этого способа. Изобретение может быть использовано в авиационной технике, следящих и охранных системах и мультимедийных компьютерных технологиях, однако его применение не ограничено перечисленными областями.
Уровень техники
Использование электромагнитного поля в следящих системах для определения положения и ориентации объекта, перемещающегося в ограниченной области пространства, хорошо известно из уровня техники. В таких системах обычно применяются дипольные передающие антенны, генерирующие либо переменные, либо импульсные (квазипостоянные) магнитные поля, измеряемые закрепленными на объекте датчиками. Показания датчиков затем используются для вычисления ориентации, определяемой в общем случае тремя угловыми координатами (азимут, угол места и крена), и тремя линейными координатами объекта. Подобные способы находят широкое применение в авиации, следящих и охранных системах, а также системах виртуальной реальности, имеющихся на рынке.
Преимущество систем, основанных на переменном синусоидальном магнитном поле частотой 10-12 кГц, заключается в отсутствии необходимости отдельного измерения магнитного поля Земли. Однако при наличии вблизи источника магнитного поля электропроводящих материалов, например алюминия, точность таких систем в значительной степени подвержена влиянию вторичных магнитных полей, генерируемых наводимыми вихревыми токами, при этом величина и распределение поля существенно искажаются в случае присутствия вблизи рабочей области материалов с высокой магнитной проницаемостью, например ферромагнетиков. В системах, описанных, например, в патентах США 4849692 и 4945305, для решения данной проблемы предлагается использование магнитного поля, генерируемого током прямоугольного импульса. Источник магнитного поля (излучатель) состоит из взаимно ортогональных катушек, по которым поочередно пропускают электрический ток, создающий в области перемещения объекта (шлема пилота летательного аппарата) последовательность соответствующим образом ориентированных магнитных полей, постоянных на длительности каждого импульса, так называемое квазипостоянное магнитное поле. Трехкомпонентный датчик системы поочередно измеряет компоненты полей каждой катушки. Таким образом, единичный цикл измерения разделяется на четыре такта, три из которых используются для последовательного измерения компонент поля излучателя, а на четвертом, когда все катушки излучателя выключены, измеряют компоненты поля Земли и остаточной намагниченности в конкретной точке. Эти значения затем вычитают из показаний датчика, полученных на первых трех тактах, в результате чего вычисляют поле, формируемое непосредственно излучателем. Для учета поля внешних помех, создаваемого оборудованием кабины пилота, необходимо магнитное картографирование области перемещения шлема, описанное, например, в патенте США 6377041, проводимое в заводских условиях по завершении строительства летательного аппарата.
Основным препятствием для использования таких систем в авиационной технике является необходимость ожидания затухания вихревых токов. Как показали исследования, время затухания вихревых токов в кубе из дюралюминия 1х1х1 м, соответствующем размерам стандартной кабины пилота, составляет порядка 1 мс, а общепринятая частота переключения тока в излучателе, при которой следящая система в наименьшей степени подвержена влиянию электрических полей, составляет 400 Гц. Следовательно, быстродействие следящей системы находится на пределе уже при частоте циклов измерений 100 Гц, поскольку длительность времени затухания сравнима с длительностью одного такта, в то время как требуемая частота выдачи угловых координат объекта (в рассматриваемом случае шлема пилота) должна быть не менее 200 Гц, что практически недостижимо в существующих системах.
В российском патенте 2197013 содержится описание принципиально иного способа определения положения и ориентации подвижного объекта, предложенного авторами настоящего изобретения, в основе которого лежит использование постоянного магнитного поля, создаваемого источником рабочего поля в ограниченной области перемещения шлема пилота. На шлеме жестко закреплены по меньшей мере шесть однокомпонентных датчиков, одновременно измеряющих нормальные компоненты вектора магнитного поля. Для каждого из измерений составляется нелинейное алгебраическое уравнение Ввыч=Визм, где Визм - это измеренное датчиком значение, а Ввыч - вычисленное значение, представляющее собой сумму магнитного поля источника, рассчитываемого одним из известных из уровня техники способов, постоянного магнитного поля Земли и поля помех, порождаемого оборудованием и ферромагнитными материалами кабины. В результате решения системы уравнений вычисляют линейные и угловые координаты объекта. Однако существенным недостатком описанной системы является обязательное наличие отдельного датчика магнитного поля Земли, который должен быть расположен на удалении от излучателя, что затрудняет его ориентацию совместно с датчиками следящей системой. Постоянное поле Земли искажается ферромагнитными элементами кабины, а изменение поля Земли меняет намагниченность металлических компонентов кабины, в результате чего показания датчика поля Земли не могут расцениваться как полностью точные для цели вычисления угловых и линейных координат объекта. Следствием является недостаточно высокая точность в определении упомянутых координат объекта.
Кроме того, при изменениях интерьера кабины летательного аппарата, которые могут иметь место во время полета, данные предварительного магнитного картографирования уже не будут достоверными, а осуществление дополнительного картографирования в полете практически невозможно.
Раскрытие изобретения
Задачей настоящего изобретения является предложение способа определения положения и ориентации подвижного объекта в пространстве, содержащем ограниченную область перемещения объекта, обеспечивающем более высокую точность вычисления линейных и угловых координат объекта за счет исключения необходимости в отдельном измерении магнитного поля Земли.
Данная задача решается посредством создания в упомянутой области перемещения объекта неоднородного постоянного магнитного поля, измеряемого дифференциальными однокомпонентными датчиками. Минимальное количество датчиков равно шести и определяется вычислением трех линейных и трех угловых координат объекта в неподвижной системе координат, например системе координат, связанной с летательным аппаратом. Дифференциальные датчики размещают в области перемещения объекта с жесткой привязкой к самому объекту и исключением взаимного дублирования. Таким образом, датчики зафиксированы в системе координат объекта, перемещающейся вместе с объектом относительно упомянутой неподвижной системы. Для вычисления требуемых координат объекта определяют линейные и угловые координаты каждого датчика в системе координат объекта. В процессе перемещения объекта производят одновременное измерение с заданной частотой, которая обычно составляет порядка 100-400 Гц, всеми дифференциальными датчиками текущих значений градиентов магнитного поля в области перемещения объекта. Упомянутое неоднородное постоянное магнитное поле должно быть несимметричным для избежания получения идентичного набора показаний датчиков, что может привести к неоднозначности в вычислении координат объекта. Показания датчиков, то есть измеренные текущие значения градиентов магнитного поля, приравнивают к расчетным градиентам неоднородного несимметричного постоянного магнитного поля, создаваемого источником рабочего поля. Расчет градиентов этого поля производится стандартными методами с учетом конкретной геометрии источника. В результате составляют систему по меньшей мере шести алгебраических уравнений, включающую координаты датчиков в системе координат объекта, которую решают с получением трех линейных и трех угловых координат объекта.
Таким образом, способ согласно изобретению устраняет одну из основных погрешностей измерений в известных технических решениях, обусловленную учетом магнитного поля Земли, предлагая замену измерения компонент магнитного поля в области перемещения объекта измерением его градиентов.
В практической ситуации на магнитное поле источника в области перемещения объекта часто оказывают влияние источники помех в виде магнитных материалов, порождающие магнитное поле помех. Для учета этого поля предварительно осуществляют магнитное картографирование области перемещения объекта. Эта процедура является хорошо известной и заключается в измерении значений компонент магнитного поля с построением карты магнитного поля помех в области перемещения объекта. В предпочтительном варианте способа согласно изобретению предлагается численное дифференцирование результатов измерений с получением набора градиентов магнитного поля помех, которые вычитают из измеренных текущих значений градиентов магнитного поля в области перемещения объекта. Набор градиентов поля помех обычно хранится в виде тензора в блоке памяти средств обработки данных, например бортового компьютера летательного аппарата, которые также используют для решения упомянутой системы уравнений.
Во втором варианте предлагаемого способа влияние источников помех, например магнитных материалов кабины летательного аппарата, порождающих магнитное поле помех, исключается без предварительного картографирования. Дополнительной особенностью этого варианта способа является переключение направления магнитного поля, создаваемого источником рабочего поля, на обратное во время перемещения объекта. Частоту переключений определяют из расчета времени, необходимого для полного затухания вихревых токов, наводимых в источниках помех в результате переключения магнитного поля. Дифференциальными датчиками одновременно измеряют текущие значения градиентов магнитного поля в области перемещения объекта до и после переключения поля и вычисляют полуразности измеренных значений для каждого датчика. Как отмечено выше, требуемая частота выдачи измерений 200 Гц, очевидно, в этом варианте способа недостижима, однако он может быть реализован с некоторым ухудшением скорости и точности определения координат объекта. Для составления системы по меньшей мере шести алгебраических уравнений к расчетным градиентам неоднородного несимметричного постоянного магнитного поля приравнивают упомянутые вычисленные полуразности. Затем решают систему уравнений с получением линейных и угловых координат объекта.
Несмотря на то, что настоящее изобретение направлено на исключение датчика магнитного поля Земли как источника ошибок, в предпочтительном варианте способа, который предусматривает картографирование магнитного поля помех, возможно использование этого датчика для осуществления контрольной функции. При этом трехкомпонентный недифференциальный датчик магнитного поля Земли размещают на расстоянии, обеспечивающем отсутствие влияния магнитного поля, создаваемого в области перемещения объекта, и магнитного поля помех на показания датчика. Направление неоднородного несимметричного постоянного магнитного поля периодически переключают на обратное и вычисляют полусумму текущих значений компонент магнитного поля в области перемещения объекта, измеренных отдельным недифференциальным датчиком, размещенным в области перемещения объекта, до и после переключения магнитного поля. Упомянутая контрольная функция заключается в определении достоверности полученного решения системы уравнений. А именно, решение признается достоверным в случае, если сумма показаний датчика магнитного поля Земли и значений магнитного поля помех в конкретной точке, полученных в результате картографирования, совпадает с вычисленной полусуммой текущих значений компонент магнитного поля в этой точке. Расхождение означает некорректность используемых данных картографирования, которая может иметь место вследствие изменения конфигурации или расположения источников помех относительно области перемещения объекта. Если расхождение превышает предварительно заданную величину, решение системы уравнений, следовательно, полученные координаты объекта, считается недостоверным, и дальнейшее определение координат объекта может производиться с использованием для решения системы уравнений вычисленных полуразностей показаний дифференциальных датчиков, то есть при реализации варианта способа, не требующего предварительного картографирования.
В следующем предпочтительном варианте изобретения выходную мощность сигнала дифференциальных датчиков поддерживают на постоянном уровне посредством регулирования напряженности магнитного поля, формируемого источником рабочего поля, для ее поддержания в установленном измерительном диапазоне датчиков. Тем самым исключаются ошибки измерений, связанные с возможным выходом напряженности за пределы или приближении к границам упомянутого диапазона.
Для осуществления способа согласно изобретению предлагается система для определения положения и ориентации объекта, перемещающегося в ограниченной области пространства (также называемая следящей системой). Система содержит источник рабочего поля для формирования в упомянутой области неоднородного несимметричного постоянного магнитного поля, который может быть выполнен в виде рамки с током. Предусмотрено по меньшей мере шесть однокомпонентных дифференциальных датчиков магнитного поля для измерения текущих градиентов магнитного поля в области перемещения объекта. Датчики жестко связаны с объектом и размещены относительно друг друга таким образом, чтобы исключалось их взаимное дублирование при одновременном измерении значений градиентов магнитного поля. Система также содержит устройства для приема сигналов датчиков и передачи этих сигналов на средства обработки данных, оснащенные блоком памяти и вычислительным блоком для решения системы по меньшей мере шести алгебраических уравнений относительно трех линейных и трех угловых координат объекта. Блок памяти предназначен для хранения линейных и угловых координат каждого датчика, определенных в системе координат объекта, и расчетных градиентов магнитного поля, формируемого источником рабочего поля.
В предпочтительном варианте эффективный диаметр источника рабочего поля (ИРП) может быть определен из эмпирического выражения:
D2 эф/(0,25*D2 эф+S2)=kΔВ/(2I),
где Dэф - эффективный диаметр ИРП, м;
S - расстояние от ИРП до самой дальней точки области перемещения объекта, м;
ΔВ - абсолютная чувствительность применяемых датчиков, Гс;
I - величина полного тока ИРП, А;
k=1А/Гс - размерный коэффициент.
Дифференциальные однокомпонентные датчики предпочтительно сгруппированы в по меньшей мере два трехкомпонентных датчика, при этом достигается максимально эффективная компактность в их расположении.
Трехкомпонентный датчик магнитного поля Земли не является обязательным компонентом следящей системы, однако может быть предусмотрен для определения достоверности вычисления координат объекта, как описано выше. В этом случае упомянутый датчик связан со средствами обработки данных и установлен на расстоянии от источников рабочего поля и помех, которое выбирается из расчета исключения влияния магнитных полей, создаваемых упомянутыми источниками, на его показания. Кроме того, данный вариант системы предусматривает наличие отдельного недифференциального датчика, расположенного в области перемещения объекта.
Краткое описание чертежей
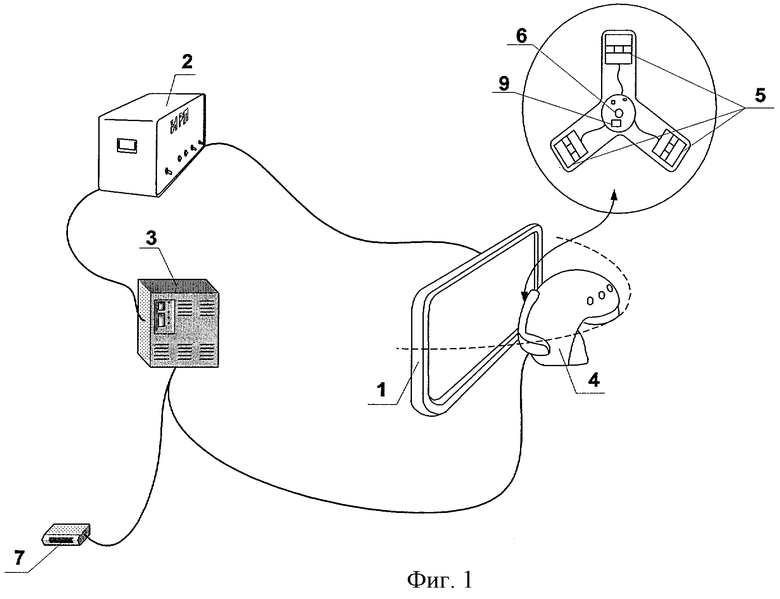
На фиг.1 приведена структурная схема следящей системы в предпочтительном варианте осуществления изобретения.
На фиг.2 показан источник рабочего поля в виде прямоугольной рамки с током.
На фиг.3а и 3б схематично изображены однокомпонентный и трехкомпонентный дифференциальные датчики.
На фиг.4 приведена конструкция приемника с дифференциальными датчиками.
На фиг.5 показана неподвижная система координат, связанная с самолетом, в которой определяются угловые и линейные координаты объекта.
На фиг.6 проиллюстрировано преобразование вращения, переводящее неподвижную систему координат по фиг.5 в подвижную систему, связанную с объектом.
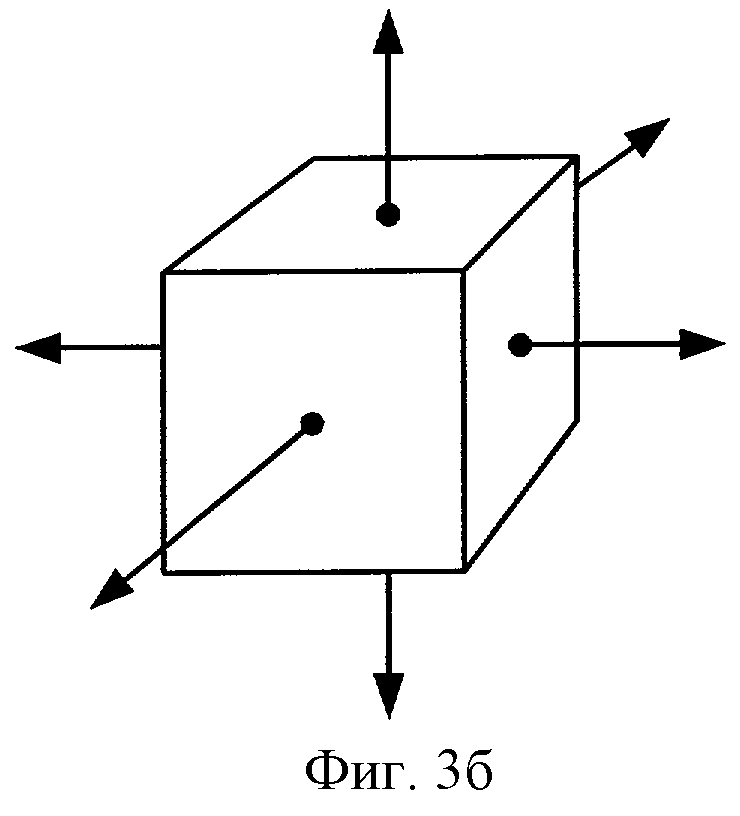
На фиг.7 приведен график зависимости ошибок измерений азимута от числа трехкомпонентных датчиков.
Осуществление изобретения
На фиг.1 приведена структурная схема следящей системы, используемой для определения положения и ориентации шлема пилота летательного аппарата, например, самолета или вертолета. В общем случае положение объекта считается определенным, когда известны его три линейные (декартовы) координаты, а ориентация - при известности трех угловых координат (углов Эйлера), то есть азимута, угла места и крена.
Система содержит источник 1 рабочего поля (ИРП) с устройством управления 2, соединенным с бортовым компьютером 3 летательного аппарата, приемник 4, закрепленный на объекте (шлеме) и содержащий девять однокомпонентных дифференциальных датчиков 5, устройство 6 в виде печатной платы с микроконтроллером для передачи показаний датчиков на компьютер 3 и трехкомпонентный датчик 7 поля Земли, располагаемый на удалении от ИРП. Рабочая область приблизительно очерчена штриховой линией вокруг ИРП.
Назначением ИРП является формирование градиентного, то есть пространственно неоднородного, несимметричного постоянного магнитного поля. Понятие “несимметричное поле” допускает наличие конечной группы пространственных симметрий, иными словами, в области перемещения объект может принимать конечное количество положений, при которых наборы показаний дифференциальных датчиков будут идентичными.
В простейшем варианте такое поле создается катушкой, выполненной, например, в виде прямоугольной рамки с током, изображенной на фиг.2. При совместном повороте датчиков на 180 градусов вокруг оси, проходящей через центр рамки перпендикулярно ее плоскости, снимаемые показания равны показаниям до поворота, и в результате последующих вычислений координат объекта будет получено так называемое симметричное решение, что означает неопределенность в установлении действительного положения и ориентации объекта. Таким образом, конфигурацию ИРП, более конкретно число симметрий рамки с током, необходимо выбирать из расчета ожидаемой траектории движения объекта, которая должна исключать такие положения объекта, где имеют место идентичные наборы показаний датчиков. В случае выполнения ИРП по фиг.2, эти положения представляют собой, например, положения пилота “сидя в кресле” и “стоя на голове”, что в реальной ситуации не реализуется, поэтому возможность получения симметричных решений в рассматриваемом случае выполнения рамки будет исключена. Можно сконструировать и полностью несимметричные рамки, однако их изготовление менее технологично. Понятно, что в предельном случае выполнения рамки в виде окружности магнитное поле будет иметь бесконечную группу пространственных симметрий, следовательно, возможность определения всех шести координат шлема отсутствует.
Шлем перемещается в ограниченной области пространства, например, предполагается, что в процессе полета пилот постоянно находится в кресле, соответственно движение его головы со шлемом ограничено. ИРП устанавливают близи шлема, например в подголовнике кресла пилота, для создания в упомянутой области магнитного поля, интенсивность которого не ниже некоторого порогового значения, определяемого чувствительностью дифференциальных датчиков. Предпочтительно поддерживать заданную интенсивность поля в зоне расположения датчиков для повышения точности измерений, чтобы уйти от нижнего или верхнего предела измерительного диапазона датчика. Это достигается регулированием тока в катушке ИРП посредством уменьшения тока при приближении шлема к ИРП и увеличением при удалении. Величина, на которую следует изменить ток в катушке, определяется на основании сравнения текущего уровня сигнала дифференциальных датчиков с предварительно заданным значением.
Размеры ИРП определяются конкретными размерами области перемещения объекта и могут быть вычислены из эмпирического выражения
D2 эф/(0,25*D2 эф+S2)=kΔВ/(21),
где Dэф - эффективный диаметр ИРП, то есть длина стороны рамки, м;
S - расстояние от ИРП до самой дальней точки области перемещения объекта, м;
ΔВ - абсолютная чувствительность применяемых датчиков, Гс;
I - величина полного тока в обмотках ИРП, А;
k=1А/Гс - размерный коэффициент.
На фиг.3а и 3б схематично изображены однокомпонентный дифференциальный датчик (фиг.3а) в виде двух параллельных чувствительных элементов, а также трехкомпонентный дифференциальный датчик (фиг.3б) в виде набора из трех однокомпонентных датчиков, располагаемых на противоположных гранях правильного гексаэдра. Дифференциальные датчики хорошо известны из уровня техники, и сведения о них можно получить, например, в книге М.Л. Бараночникова. "Микромагнитоэлектроника", т.2. - Москва: ДМК-Пресс, 2001.
На фиг.4 изображен приемник 4, содержащий девять однокомпонентных дифференциальных датчиков 5, размещенных в углах треугольной печатной платы 8 по три датчика в каждом углу. Как было упомянуто выше, приемник закреплен на шлеме пилота, что обеспечивает жесткую связь датчиков со шлемом, следовательно, их совместное перемещение.
Датчики размещаются с исключением взаимного дублирования. Это означает следующее. Каждый однокомпонентный датчик измеряет текущие градиенты магнитного поля в области перемещения шлема, то есть скорость изменения нормальной компоненты магнитного поля вдоль определенного направления. При использовании отдельных однокомпонентных датчиков они, как правило, могут быть расположены на поверхности платы с одинаковой пространственной ориентацией чувствительных элементов. Следовательно, между датчиками должно быть определенное расстояние, зависящее от градиента поля и ошибок измерений. В случае несоблюдения такого расстояния между двумя произвольными датчиками, они, по сути, будут измерять одну и ту же величину, что эквивалентно использованию одного датчика.
В предпочтительном варианте, изображенном на фиг.4, датчики конструктивно объединены в трехкомпонентные датчики. Здесь парные чувствительные элементы ориентированы в трех взаимно перпендикулярных направлениях, и однокомпонентные датчики могут быть расположены сколь угодно близко друг к другу, практически в одной точке, обеспечивая максимальную компактность конструкции. При этом дублирование датчиков исключено, поскольку значения нормальных компонент магнитного поля во взаимно перпендикулярных направлениях не зависят друг от друга даже в одной точке пространства. Иными словами, для исключения дублирования необходимо располагать однокомпонентные дифференциальные датчики на некотором минимальном расстоянии друг от друга, при этом пространственная ориентация их чувствительных элементов может быть одинаковой, либо ориентировать чувствительные элементы датчиков в различных направлениях.
Печатная плата 8 также содержит электронные компоненты (не показаны), необходимые для питания датчиков, усиления и формирования выходных сигналов.
Устройство 6 передачи данных от приемника 4, то есть сигналов датчиков, в бортовой компьютер может быть расположено в нагрудном кармане пилота, непосредственно на шлеме или на кресле пилота. Это устройство выполнено в виде печатной платы со встроенным микроконтроллером, синхронизирующим работу преобразователя аналоговых сигналов дифференциальных датчиков в цифровую форму, и компьютера 3. Компьютер оснащен блоком памяти, например постоянным запоминающим устройством, для хранения координат датчиков и расчетных градиентов магнитного поля, формируемого ИРП. Более подробно расчет градиентов поля ИРП и определение координат датчиков описываются ниже.
Датчик 7 магнитного поля Земли и отдельный датчик 9, который размещен в области перемещения объекта и предназначен для измерения текущих компонент магнитного поля, формируемого в области перемещения объекта, представляют собой обычные трехкомпонентные недифференциальные датчики. Датчик 7 установлен на таком расстоянии от ИРП и источников внешних помех, например элементов кабины самолета, изготовленных из ферромагнитных материалов, чтобы исключить влияние магнитных полей, которые создаются этими источниками, на показания датчика. Эти показания передаются на бортовой компьютер и учитываются при реализации некоторых вариантов способа согласно настоящему изобретению.
Далее посредством примеров описываются варианты предлагаемого способа определения положения и ориентации подвижного объекта, являющегося в рассматриваемом случае шлемом пилота. С целью упрощения понимания приводимых расчетов в дальнейшем под термином “шлем” (или объект) понимается некоторая точка в области расположения шлема, перемещающаяся в заданной ограниченной области пространства. Эта точка сопоставляется началу координат подвижной координатной системы, жестко связанной со шлемом.
На фиг.5 показана связанная с самолетом неподвижная система координат, в которой вычисляют координаты указанной точки, то есть определяют положение и ориентацию объекта. Ось Х направлена по оси полета, ось Y направлена вверх, ось Z направлена в сторону правого крыла, составляя правую тройку векторов.
На фиг.6 представлено преобразование вращения, переводящее эту неподвижную систему координат в подвижную систему координат (ХHYHZH), связанную со шлемом летчика и получаемую из неподвижной системы после вращения вокруг осей X, Y и Z на углы Эйлера ϕx, ϕy и ϕz с последующим параллельным переносом на вектор  где
где

Три линейные и три угловые координаты объекта для единообразия в дальнейшем объединены в 6-компонентный вектор обобщенных координат

который полностью определяют преобразование системы координат на фиг.6.
Пространственный поворот, соответствующий переходу от неподвижной системы координат к системе координат, отмеченной на фиг.6 тремя штрихами, может быть представлен в виде следующей последовательности трех элементарных поворотов. Например, сначала с помощью вращения вокруг оси Z на угол ϕz из неподвижной системы координат получается система координат с одним штрихом. При этом ось Z' в новой системе координат совпадает со старой осью Z. Далее, вращением вокруг оси Y' на угол ϕy получается система координат, отмеченная двумя штрихами. При этом ось Y’’ в новой системе координат совпадает со старой осью Y'. Наконец, поворотом вокруг оси X’’ на угол ϕx переходим в систему координат, отмеченную тремя штрихами. При этом ось X’’’ совпадает с осью X’’.
Так что все вращение описывается следующей матрицей поворотов:
где А11=cosϕy cosϕz, А12=-sinϕz, А13=sinϕy cosϕz,
A21=cosϕx sinϕz cosϕy+sinϕxsinϕy, A22=cosϕx cosϕz,
A23=cosϕx sinϕz sinϕy-sinϕx cosϕy, A31=sinϕx sinϕz cosϕy-cosϕxsinϕy,
A32=sinϕx cosϕz и A33=sinϕx sinϕz sinϕy+cosϕx cosϕy.
Оси системы координат с тремя штрихами совпадают с осями подвижной системы координат с точностью до параллельного переноса.
До начала полета пилот надевает на голову шлем с закрепленными дифференциальными датчиками. В процессе полета в области перемещения шлема посредством описанного выше источника рабочего поля создают неоднородное несимметричное постоянное магнитное поле. Далее рассматривается вариант с девятью дифференциальными датчиками, где  - координаты (радиус-вектор) некоторого датчика (k=1...9) и
- координаты (радиус-вектор) некоторого датчика (k=1...9) и  - единичный вектор нормали к поверхности чувствительного элемента датчика в неподвижной системе координат, определяющий его пространственную ориентацию. Обозначим
- единичный вектор нормали к поверхности чувствительного элемента датчика в неподвижной системе координат, определяющий его пространственную ориентацию. Обозначим  и
и  те же два вектора в подвижной системе координат, то есть в системе координат, жестко связанной со шлемом. Линейные и угловые координаты датчика в подвижной системе координат измеряют непосредственно на шлеме при помощи стандартных измерительных средств. Линейные координаты относительно плоскостей подвижной системы координат можно определить, например, штанген-рейсмусом. Угловые координаты закрепленных на шлеме дифференциальных датчиков, то есть ориентацию нормалей к чувствительным элементам датчиков, определяют, например, вращением шлема в однородном магнитном поле, см. Ю.В.Афанасьев, Н.В.Студенцов, А.П.Щепкин. "Магнитометрические преобразователи, приборы, установки". - Москва: Энергия, 1972. Поскольку подвижная координатная система перемещается вместе со шлемом относительно неподвижной системы координат, положение и ориентация датчиков в подвижной системе координат не меняются при любых перемещениях шлема, т.е. являются постоянными. Следовательно, линейные и угловые координаты каждого датчика, то есть его положение и ориентация, в неподвижной системе координат полностью определяются положением подвижной системы координат относительно неподвижной.
те же два вектора в подвижной системе координат, то есть в системе координат, жестко связанной со шлемом. Линейные и угловые координаты датчика в подвижной системе координат измеряют непосредственно на шлеме при помощи стандартных измерительных средств. Линейные координаты относительно плоскостей подвижной системы координат можно определить, например, штанген-рейсмусом. Угловые координаты закрепленных на шлеме дифференциальных датчиков, то есть ориентацию нормалей к чувствительным элементам датчиков, определяют, например, вращением шлема в однородном магнитном поле, см. Ю.В.Афанасьев, Н.В.Студенцов, А.П.Щепкин. "Магнитометрические преобразователи, приборы, установки". - Москва: Энергия, 1972. Поскольку подвижная координатная система перемещается вместе со шлемом относительно неподвижной системы координат, положение и ориентация датчиков в подвижной системе координат не меняются при любых перемещениях шлема, т.е. являются постоянными. Следовательно, линейные и угловые координаты каждого датчика, то есть его положение и ориентация, в неподвижной системе координат полностью определяются положением подвижной системы координат относительно неподвижной.
Это положение может быть задано тремя декартовыми координатами и тремя углами Эйлера, что может быть записано в векторном виде

или покомпонентно

В формулах (4) и (5) величины с индексом Н являются числами, непосредственно измеряемыми описанным выше образом для каждого датчика, поэтому формулы (4) и (5) задают явные зависимости  и
и  для каждого датчика.
для каждого датчика.
Магнитное поле измеряют в процессе перемещения шлема на протяжении всего полета одновременно всеми девятью однокомпонентными дифференциальными датчиками. Частота измерений, определяющая частоту выдачи показаний положения и ориентации объекта, является заданной величиной и обычно составляет порядка 100-400 Гц. Обычный, то есть недифференциальный, датчик магнитного поля измеряет нормальную к поверхности чувствительной зоны датчика компоненту вектора магнитного поля

где  - вектор магнитного поля в центре чувствительной зоны k-го датчика.
- вектор магнитного поля в центре чувствительной зоны k-го датчика.
Дифференциальный датчик измеряет скорость изменения скалярной величины (6) вдоль направления нормали к поверхности чувствительной зоны датчика, т.е. следующее скалярное произведение

Здесь под  обозначен градиент величины (6)
обозначен градиент величины (6)

Поскольку источник рабочего поля определен в неподвижной системе координат, а градиент (8) задан в той же системе координат, то вычисление производных в (8) происходит в естественных координатах, то есть не подразумевает вычисления перекрестных производных ∂хi/∂хj. Поэтому в развернутом виде выражение (7) задает скалярную величину в виде следующей тензорной свертки:
В выражении (9) векторы  и
и  вычислены в неподвижной системе координат. Вектор магнитного поля вычисляется в точке
вычислены в неподвижной системе координат. Вектор магнитного поля вычисляется в точке  определяемой из известных координат
определяемой из известных координат  по формулам (4). Вектор нормали в неподвижной системе координат получается из известного вектора нормали в подвижной системе координат по формуле (5).
по формулам (4). Вектор нормали в неподвижной системе координат получается из известного вектора нормали в подвижной системе координат по формуле (5).
Источник рабочего поля может быть смоделирован совокупностью сравнительно простых источников поля, для которых известны аналитические формулы по определению магнитного поля в произвольной точке пространства, например точечный диполь, прямолинейный провод с током и др. (см. И.Е. Тамм. Основы теории электричества. - М: Наука, 1989). Используя эти формулы, рассчитывают градиенты неоднородного несимметричного постоянного магнитного поля, формируемого ИРП, которые записывают в блок памяти компьютера 3.
В выражение (9) для расчетного градиента поля входят постоянные для конкретного датчика величины, то есть линейные и угловые координаты датчика в подвижной системе, а также шесть неизвестных координат объекта. Тем самым выражение (9) для k=1...9 задает 9 функций одного и того же вида

зависящих от шести координат объекта, подлежащих определению и отличающихся только постоянными величинами - линейными и угловыми координатами датчиков в подвижной системе координат. Выражения (10) в явном виде крайне громоздки, но описанный выше алгоритм дает представление о способе их вычисления.
Рассчитанный градиент магнитного поля (10) как функция шести неизвестных координат должен равняться значению градиента поля  измеряемому дифференциальным датчиком, что задает систему из 9 нелинейных алгебраических уравнений
измеряемому дифференциальным датчиком, что задает систему из 9 нелинейных алгебраических уравнений

где k=1...9.
Система девяти уравнений (11) от шести переменных (2) решается, например, путем поиска минимума функционала невязки F

где  - произвольный вектор обобщенных координат, α - параметр регуляризации (см. А.Н.Тихонов, В.Я.Арсенин. Методы решения некорректных задач. - М: Наука, 1986).
- произвольный вектор обобщенных координат, α - параметр регуляризации (см. А.Н.Тихонов, В.Я.Арсенин. Методы решения некорректных задач. - М: Наука, 1986).
Минимизация функционала (12) может быть осуществлена итерационно, например обобщенным методом Ньютона (см. Б.П.Демидович, И.А.Марон. Основы вычислительной математики. - М: Наука, 1970). Для этого приравнивают нулю все шесть частных производных ∂F/∂хi функционала (12), что приводит к системе линейных уравнений с положительно определенной матрицей размерности (6*6)

где  и
и  k=1...9, i=1...6, a DT - транспонированная к матрице производных D матрица.
k=1...9, i=1...6, a DT - транспонированная к матрице производных D матрица.
Линейная система шести уравнений (13) относительно шести неизвестных приращений  решается, например, методом Гаусса (см. Б.П.Демидович, И.А.Марон. Основы вычислительной математики. - М: Наука, 1970).
решается, например, методом Гаусса (см. Б.П.Демидович, И.А.Марон. Основы вычислительной математики. - М: Наука, 1970).
Пусть (x(0), y(0), z(0), ϕx (0), ϕy (0), ϕz (0)) - некоторое начальное приближение вектора (2), за которое удобно принимать решение задачи определения координат шлема, полученное на предыдущем шаге по времени. Повторяя итерационную процедуру (13) обобщенного метода Ньютона достаточное число раз, можно вычислить шесть неизвестных линейных и угловых координат объекта с любой требуемой точностью.
В принципе, для корректного решения системы (11) необходимо минимум шесть уравнений, то есть дифференциальных датчиков, но для повышения точности и достоверности решения предпочтительно использовать избыточное количество датчиков, как в приведенном выше примере. На фиг.7 показан график зависимости ошибок измерений одного из углов Эйлера (азимута) от числа трехкомпонентных датчиков N, расположенных в вершинах плоского правильного N-угольника, вписанного в окружность радиуса R, измеряемого в сантиметрах. Графики построены для следящих систем разных размеров, определяемых радиусом R, и разных относительных ошибок δ=Δb/b измерения поля датчиками. Как видно, во всех случаях наблюдается значительное снижение ошибки измерения азимута Δϕy при переходе от минимального (N=2) к избыточному (N=3) числу измерений, однако избыточность числа датчиков не должна быть чрезмерной, так как кривая ошибок быстро выходит на плато. Предпочтительно использование трех трехкомпонентных, т.е. девяти однокомпонентных датчиков.
В реальных условиях в кабине самолета или вертолета имеются компоненты, содержащие ферромагнитные материалы, которые создают постоянные магнитные поля, вносящие искажения в картину распределения магнитного поля, формируемого ИРП. Для их учета предусмотрена так называемая процедура картографирования магнитного поля с построением карты поля помех в области перемещения объекта. Картографирование выполняют в заводских условиях после изготовления, ремонта или замены оборудования или непосредственно перед полетом. Данная процедура хорошо известна из уровня техники и описана, например, в D.Newton. The Magnetic Field Mapping of Detector Magnets, CERN Accelerator School, Magnetic Measurement and Alignment, Proc. CERN 92-05 (15 сентября 1992), стр. 283-295; H. Wind. Evaluating a Magnetic Field Component from Boundary Observations Only. Nuclear Instruments and Methods, том. 84, N 1, июль 1970, стр. 117-128, и заключается в измерении значений компонент магнитного поля, порожденного источниками внешних помех и магнитными материалами. Настоящее изобретение также предусматривает численное дифференцирование результатов измерений с получением набора градиентов магнитного поля помех, который заносят в блок памяти бортового компьютера и вычитают при решении системы уравнений из измеренных текущих значений градиентов магнитного поля.
Из вышеизложенного должно быть очевидно, что наличие датчика магнитного поля Земли не является обязательным. В предлагаемом способе он выполняет контрольную функцию, заключающуюся в определении достоверности полученного решения системы уравнений. Для этой цели периодически производят переключение направления магнитного поля, то есть тока в ИРП, на обратное и вычисляют полусумму значений, измеренных отдельным недифференциальным датчиком 9 до и после переключения поля. Достоверность решения определяют по результатам сравнения вычисленных полусумм измеренного поля с суммой показаний датчика поля Земли и значений магнитного поля помех, полученных в результате картографирования. В случае получения равенства сравниваемых величин или разницы между ними, находящейся в заранее заданном допустимом диапазоне, решение системы уравнений, то есть полученные координаты объекта, признают достоверным и продолжают определять положение и ориентацию объекта с заданной частотой.
В случае выхода за пределы упомянутого диапазона дальнейшее осуществление описанного варианта способа, очевидно, является бессмысленным, поскольку не обеспечивает получения правильных координат. Такая ситуация может возникнуть при изменении интерьера кабины пилота летательного аппарата, например ферромагнитных конструкций, когда данные картографирования магнитного поля помех уже не являются достоверными.
В связи с этим изобретение предлагает следующий вариант способа определения и ориентации подвижного объекта в пространстве, содержащем источники помех, которые порождают магнитное поле помех. Основное отличие этого варианта от вышеизложенного заключается в отсутствии необходимости в предварительном картографировании, а для устранения влияния помех направление магнитного поля ИРП в области перемещения объекта непрерывно переключают на обратное. Вместо текущих значений градиентов магнитного поля в области перемещения объекта для решения системы алгебраических уравнений используют полуразности этих значений, измеренных дифференциальными датчиками до и после переключения магнитного поля, создаваемого ИРП. В этих полуразностях существенно уменьшена составляющая поля помех. Как было упомянуто выше, частота переключения должна определяться из расчета времени, необходимого для полного затухания вихревых токов, наводимых в источниках помех в результате переключения магнитного поля. В реальной кабине пилота характерное время затухания вихревых токов составляет приблизительно 1 мс, то есть можно определять положение и ориентацию объекта с частотой, не превышающей 100 Гц. Иными словами, за счет некоторого уменьшения быстродействия следящей системы данный вариант способа тем не менее обеспечивает возможность определения координат объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2000 |
|
RU2197013C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| Способ трекинга гибкого хирургического инструмента на основе инерциальных МЭМС датчиков | 2021 |
|
RU2767174C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ МАГНИТНОГО ДИПОЛЯ | 2010 |
|
RU2456642C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНЫХ ПАРАМЕТРОВ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 1989 |
|
RU2075759C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНДУКЦИИ ГЕОМАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2236029C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРИРАЩЕНИЯ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ТРЕХКОМПОНЕНТНЫМ ДИФФЕРЕНЦИАЛЬНЫМ МАГНИТОМЕТРОМ | 2006 |
|
RU2313801C1 |




Изобретение относится к способу определения положения и ориентации с использованием магнитного поля. Сущность: в области перемещения объекта создают неоднородное несимметричное постоянное магнитное поле. Рассчитывают градиенты этого поля. В упомянутой области размещают по меньшей мере шесть дифференциальных однокомпонентных датчиков с обеспечением жесткой связи с объектом и исключением взаимного дублирования. Координаты датчиков определены в системе координат объекта. В процессе перемещения объекта производят измерение дифференциальными датчиками текущих значений градиентов магнитного поля. Затем составляют систему по меньшей мере шести алгебраических уравнений, включающую упомянутые координаты датчиков, посредством приравнивания измеренных значений градиентов к рассчитанным градиентам магнитного поля. Упомянутую систему уравнений решают с получением трех линейных и трех угловых координат объекта. Система содержит источник магнитного поля, по меньшей мере шесть однокомпонентных дифференциальных датчиков магнитного поля, жестко связанных с объектом, устройство для приема сигналов датчиков и передачи этих сигналов на средства обработки данных, вычислительный блок. Технический результат: повышение точности. 3 н. и 11 з.п. ф-лы, 7 ил.
D2 эф/(0,25·D2 эф+S2)=kΔВ/(2I),
где Dэф - эффективный диаметр источника рабочего поля, м;
S - расстояние от источника рабочего поля до самой дальней точки области перемещения объекта, м;
ΔВ - абсолютная чувствительность дифференциальных датчиков, Гс;
I - величина полного тока источника рабочего поля, А;
k=1А/Гс - размерный коэффициент.
| СПОСОБ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2000 |
|
RU2197013C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2151405C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2103664C1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |

