Изобретение относится к координатным устройствам на линейных электродвигателях с программным управлением и может быть использовано в прецизионных станках для раскроя и резки различных листовых материалов (фанеры, пластиков, линолеума и других напольных покрытий, металла и т.п.), а также для нанесения различного вида рисунков на плоские поверхности.
Известно координатное устройство [1], содержащее основание, рабочий стол, две параллельные направляющие, установленные вдоль противоположных сторон основания, портальную балку, установленную с возможностью реверсивного перемещения по направляющим основания, головку с рабочим инструментом, установленную с возможностью реверсивного перемещения вдоль портальной балки, средства перемещения портальной балки и головки с рабочим инструментом, выполненные в виде боковых и портального линейных электродвигателей, при этом концы портальной балки прикреплены к индукторам боковых линейных электродвигателей посредством шарнирных опор, программный блок управления. Шарнирные опоры имеют две и три степени свободы соответственно, при этом каждая из опор имеет один шарнир с вертикальной осью вращения. Кроме того, одна из опор имеет дополнительно шарнир с горизонтальной осью вращения, а другая - два шарнира с горизонтальными осями вращения, причем поворот вокруг горизонтальных осей конструктивно достаточно ограничен. В этом случае даже незначительная непараллельность направляющих ведет к нарушению параллельности портальной балки по отношению к рабочему столу. Эта величина может достигать 0,5 мм и более при размерах рабочего стола 1000×1500 мм, что приводит к снижению точности резки, биговки, раскроя, нанесения рисунка и пр., то есть к снижению точности производимой на станке работы. При электрическом сбое в одном из боковых линейных электрических двигателей возникает ситуация, когда индуктор одного двигателя как бы опережает в своем движении индуктор другого двигателя. При этом нарушается параллельность портальной балки относительно передней кромки рабочего стола, а также параллельность портальной балки относительно поверхности рабочего стола, что также приводит к снижению точности выполняемой работы.
Надежность устройства ограничена, так как в случае внезапной остановки одного из двигателей другой продолжает работать, перекос балки может достичь запредельных значений, что приведет к заклиниванию шарниров с горизонтальной осью вращения и выходу из строя всего координатного устройства.
Кроме того, в портальной балке координатного устройства используются разнородные материалы - гранитные бруски для направляющих портального линейного электродвигателя и пустотелая металлическая балка в качестве несущего элемента. При изменении температуры возможно изменение прямолинейности портальной балки за счет разности коэффициентов линейного термического расширения, что также снижает точность выполняемых операций.
Известно координатное устройство [2], содержащее основание, рабочий стол, источник сжатого воздуха и программный блок управления, две параллельные боковые направляющие, установленные вдоль противоположных сторон основания, портальную балку, установленную с возможностью реверсивного перемещения по направляющим основания, головку с рабочим инструментом, установленную с возможностью реверсивного перемещения вдоль портальной балки, средства перемещения портальной балки и головки с рабочим инструментом, выполненные в виде боковых и портального линейных электродвигателей. Концы портальной балки прикреплены к индукторам боковых линейных электродвигателей посредством шарнирных опор, а на индукторе портального линейного электродвигателя установлена головка с рабочим инструментом. Выполнение портальной балки из предварительно напряженных опорных брусков исключает влияние изменения температуры окружающей среды на форму балки, что ведет к повышению точности выполняемых операций. Однако шарнирные опоры в данном устройстве также имеют две и три степени свободы соответственно, вследствие чего сохраняются недостатки устройства [1], связанные со сбоями в работе боковых линейных электродвигателей и с возможной непараллельностью направляющих.
Техническим результатом изобретения является повышение точности и надежности координатного устройства при выполнении рабочих операций.
Указанный технический результат достигается тем, что в координатном устройстве, содержащем основание, рабочий стол, источник сжатого воздуха и программный блок управления, две параллельные боковые направляющие, установленные вдоль противоположных сторон основания, портальную балку, установленную с возможностью реверсивного перемещения по направляющим основания, головку с рабочим инструментом, установленную с возможностью реверсивного перемещения вдоль портальной балки, средства перемещения портальной балки и головки с рабочим инструментом, выполненные в виде боковых и портального линейных электродвигателей, включающих статор и индуктор, при этом статор каждого бокового линейного электродвигателя установлен вдоль боковой направляющей, статор портального линейного электродвигателя установлен вдоль портальной балки, подвижный индуктор каждого линейного электродвигателя снабжен трехсторонними аэростатическими опорами, концы портальной балки прикреплены к индукторам боковых линейных электродвигателей посредством портальных опор, а на индукторе портального линейного электродвигателя установлена головка с рабочим инструментом, одна из портальных опор выполнена в виде подшипникового узла вращения с вертикальной осью, ось жестко закреплена на одном из концов портальной балки, а корпус подшипникового узла жестко закреплен на подвижном индукторе соответствующего бокового линейного электродвигателя, другая портальная опора выполнена в виде подшипникового узла вращения с вертикальной осью, кинематически соединенного с узлом линейного перемещения в плоскости, перпендикулярной оси вращения подшипникового узла, и состоящего из подвижного элемента и направляющих, при этом корпус упомянутого подшипникового узла жестко закреплен на подвижном индукторе другого бокового линейного электродвигателя, ось подшипникового узла жестко связана с подвижным элементом узла линейного перемещения, направляющие которого жестко установлены на соответствующем конце портальной балки, причем узел линейного перемещения снабжен механизмом регулировки зазоров и датчиком линейного перемещения, электрически соединенным с программным блоком управления.
Выполнение и установка портальных опор по изобретению позволяет полностью исключить ситуации, ведущие к нарушению параллельности портальной балки по отношению к поверхности рабочего стола и соответственно к повышению точности выполняемых на устройстве операций, так как в данном случае изменение положения портальной балки относительно поверхности стола исключается.
Оснащение узла линейного перемещения портальной опоры датчиком линейного перемещения, электрически соединенным с программным блоком управления, позволяет программным методом скорректировать как начальную непараллельность боковых направляющих, так и возникающую в процессе работы вследствие небольших сбоев в электродвигателях. Нарушения параллельности портальной балки относительно передней кромки рабочего стола при сбоях в работе одного из боковых линейных электродвигателей устраняются путем выработки программным блоком управления соответствующего сигнала и внесения корректив в движение головки с рабочим инструментом. Это дополнительно повышает точность выполняемых операций. В случае внезапной остановки одного из упомянутых электродвигателей датчик линейного перемещения выдает сигнал на выключение координатного устройства при достижении предельных значений линейных перемещений одного из концов портальной балки, что исключает заклинивание и выход устройства из строя, а тем самым повышает надежность работы координатного устройства.
Наличие зазоров в узле линейного перемещения снижает точность работы устройства. Снабжение узла линейного перемещения механизмом регулировки зазоров позволяет выбрать упомянутые зазоры до нулевого значения и поддерживать такое состояние путем периодического контроля.
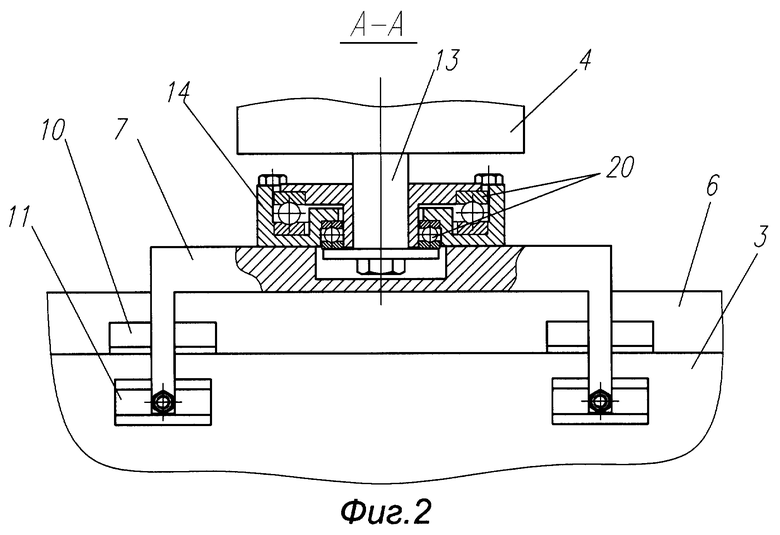
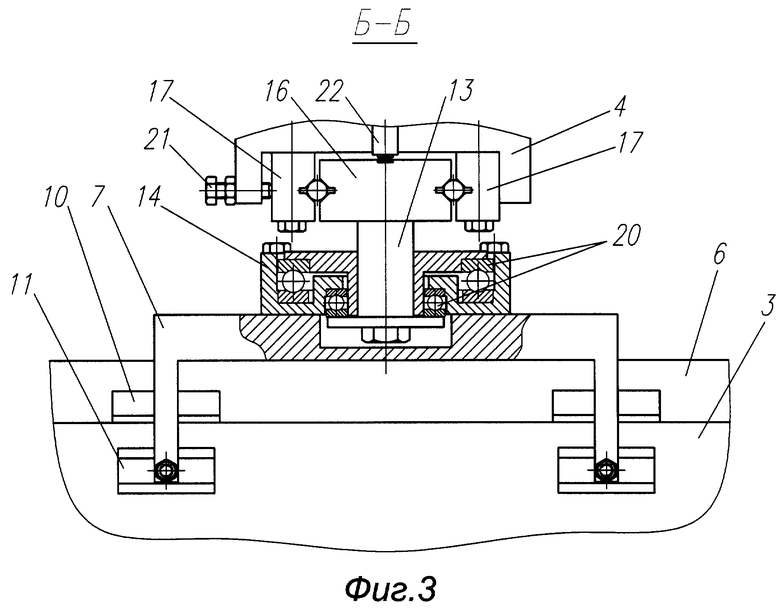
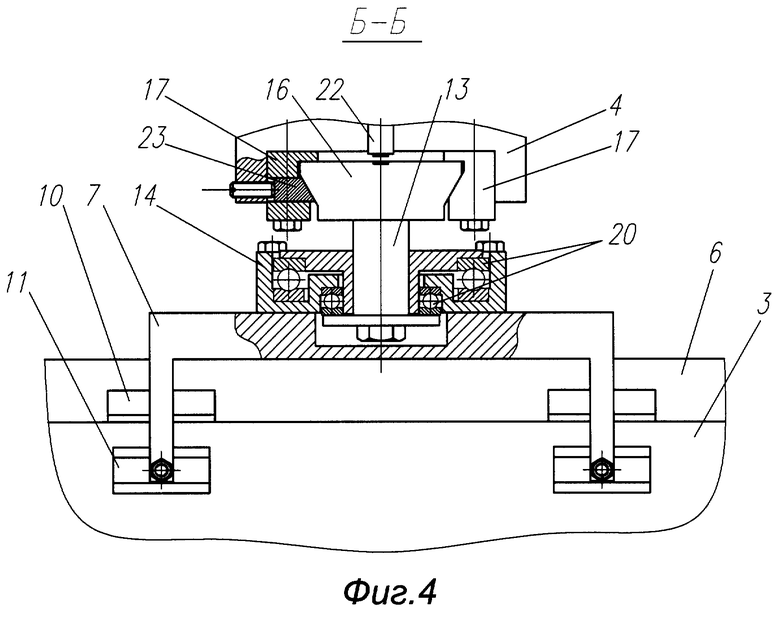
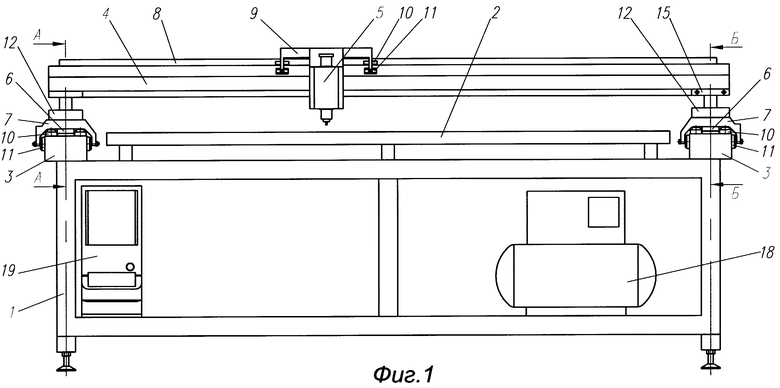
Координатное устройство представлено на фиг.1-4, при этом на фиг.1 представлен общий вид устройства, на фиг.2 - разрез А-А на фиг.1, на фиг.3 - разрез Б-Б на фиг.1, на фиг.4 - разрез Б-Б на фиг.1 (вариант), где: 1 - основание, 2 - рабочий стол, 3 - боковая направляющая, 4 - портальная балка, 5 - головка с рабочим инструментом, 6 - статор бокового линейного электродвигателя, 7 - индуктор бокового линейного электродвигателя, 8 - статор портального линейного электродвигателя, 9 - индуктор портального линейного электродвигателя, 10 - несущая аэростатическая опора, 11 - боковая аэростатическая опора, 12 - подшипниковый узел вращения, 13 - ось подшипникового узла, 14 - корпус подшипникового узла, 15 - узел линейного перемещения, 16 - подвижный элемент узла линейного перемещения, 17 - направляющая узла линейного перемещения, 18 - источник сжатого воздуха, 19 - программный блок управления, 20 - упорный шариковый подшипник, 21 - регулировочный винт с контргайкой, 22 - датчик линейного перемещения, 23 - клин для регулировки зазора.
Координатное устройство (фиг.1) содержит основание 1, рабочий стол 2, две параллельные боковые направляющие 3, установленные вдоль противоположных сторон основания 1, портальную балку 4, установленную с возможностью реверсивного перемещения по направляющим основания, головку 5 с рабочим инструментом, установленную с возможностью реверсивного перемещения вдоль портальной балки 4. Устройство включает средства перемещения портальной балки и головки с рабочим инструментом, выполненные в виде боковых линейных электродвигателей, включающих статор 6 и индуктор 7, при этом статор 6 каждого бокового линейного электродвигателя установлен вдоль боковой направляющей 3, и портального линейного электродвигателя, включающего статор 8 и индуктор 9. Статор 8 портального линейного электродвигателя установлен вдоль портальной балки 4. Подвижный индуктор каждого линейного электродвигателя снабжен трехсторонними аэростатическими опорами, включающими несущие опоры 10 и боковые опоры 11. Концы портальной балки 4 прикреплены к индукторам 7 боковых линейных электродвигателей посредством портальных опор, а на индукторе 9 портального линейного электродвигателя установлена головка 5 с рабочим инструментом. Устройство включает также источник сжатого воздуха 18 и программный блок управления 19. Одна из портальных опор выполнена в виде подшипникового узла вращения 12 с вертикальной осью 13 (см. фиг.2), которая жестко закреплена на одном из концов портальной балки 4, а корпус 14 подшипникового узла жестко закреплен на подвижном индукторе 7 соответствующего бокового линейного электродвигателя. Другая портальная опора выполнена в виде подшипникового узла вращения 12 с вертикальной осью 13 (см. фиг.3), кинематически соединенного с узлом линейного перемещения 15 в плоскости, перпендикулярной оси вращения подшипникового узла 12. Узел линейного перемещения 15 состоит из подвижного элемента 16 и направляющих 17. Корпус 14 подшипникового узла жестко закреплен на подвижном индукторе 7 другого бокового линейного электродвигателя. Ось 13 подшипникового узла жестко связана с подвижным элементом 16 узла линейного перемещения, направляющие 17 которого жестко установлены на соответствующем конце портальной балки 4. Узел линейного перемещения снабжен механизмом регулировки зазоров и датчиком линейного перемещения 22, электрически соединенным с программным блоком управления 19.
Подшипниковые узлы вращения 12 могут быть установлены и зеркально, то есть ось подшипникового узла может быть жестко закреплена на индукторах боковых линейных электродвигателей, корпус 14 одного из узлов может быть жестко закреплен на конце портальной балки, а корпус другого узла может быть конструктивно совмещен с подвижным элементом 16 узла линейного перемещения 13. Однако вышеописанный вариант установки подшипниковых узлов вращения проще в изготовлении и удобнее в эксплуатации.
Подшипниковые узлы вращения 12 могут быть выполнены на двух упорных шариковых подшипниках 20 (фиг.2, 3).
Узел линейного перемещения 15 может быть выполнен на шариковых призматических направляющих с механизмом регулировки зазоров в виде регулировочного винта 21 с контргайкой (фиг.3) или на направляющей типа “ласточкин хвост” с клином 23 для регулировки зазоров (фиг.4).
Координатное устройство работает следующим образом. После включения напряжения и подачи сжатого воздуха от его источника 18 устройство готово к работе. По сигналу программного блока управления 19 одновременно и согласованно подается напряжение на обмотки управления индукторов 7 боковых линейных электродвигателей. Одновременно напряжение подается также на обмотку управления индуктора 9 портального линейного электродвигателя. В боковых и портальном линейных электродвигателях создается тяговое усилие, воздействующее на их индукторы, в результате чего происходит перемещение портальной балки 4 по боковым направляющим 3 основания 1 и перемещение головки 5 с рабочим инструментом вдоль портальной балки 4. При этом обеспечивается двухкоординатное перемещение рабочего инструмента с высокой точностью по любой заданной траектории. Программный блок управления обеспечивает работу несущих 10 и боковых 11 аэростатических опор с поддержанием постоянного рабочего зазора в линейных электродвигателях между их статорами и индукторами, что исключает механическое трение и гарантирует надежность работы устройства. Высокая точность перемещения рабочего инструмента по любой заданной траектории обеспечивается не только за счет конструкции портальной балки, применения специальных материалов для боковых направляющих и несущих брусков портальной балки, как в координатном устройстве [2], но также за счет новой конструкции портальных опор, одна из которых выполнена в виде подшипникового узла вращения 12, а другая - в виде подшипникового узла вращения 12, совмещенного с узлом линейного перемещения 15. Узел линейного перемещения оснащен датчиком линейного перемещения 22, электрически соединенным с программным блоком управления 19. Для повышения точности работы координатного устройства зазоры в узле линейного перемещения должны быть нулевыми. Для выборки зазоров применяются регулировочные винты 21 с контргайкой в случае выполнения узла линейного перемещения на шариковых призматических направляющих или клин 23 в случае его выполнения на направляющей типа “ласточкин хвост”. Предварительная проверка правильности настройки плоттера может быть произведена способом выполнения фигуры “прямоугольник” и сравнением его диагоналей. Необходимая поправка вносится в программный блок управления 19 и учитывается в процессе работы при помощи датчика линейного перемещения 22.
Нарушения параллельности портальной балки 4 относительно передней кромки рабочего стола 2 при сбоях в работе одного из боковых линейных электродвигателей устраняются путем выработки программным блоком управления 19 соответствующих сигналов по команде датчика линейного перемещения 22 и дальнейшего внесения корректив в движение портальной балки 4 и головки 5 с рабочим инструментом. Наличие в одной из портальных опор узла линейного перемещения позволяет сохранять в процессе работы параллельность портальной балки относительно поверхности рабочего стола, что позволяет повысить точность работы устройства. Кроме того, наличие упомянутого узла линейного перемещения позволяет исключить заклинивание в портальных опорах и, тем самым, повысить надежность работы устройства.
Таким образом, устройство по изобретению позволяет повысить точность и надежность координатного устройства при выполнении рабочих операций.
Источники информации
1. Патент RU №2133184, кл. В 23 Q 1/01, 08.04.1998.
2. Патент RU №2173625, кл. В 23 Q 1/25, 21.12.2000 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| КООРДИНАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2173625C1 |
| КООРДИНАТНЫЙ СТОЛ, ПОРТАЛ КООРДИНАТНОГО СТОЛА И СПОСОБ ИЗГОТОВЛЕНИЯ ИНДУКТОРА МНОГОФАЗНОГО ЛИНЕЙНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1998 |
|
RU2133184C1 |
| КООРДИНАТНЫЙ СТОЛ (ВАРИАНТЫ) | 2003 |
|
RU2244617C1 |
| КООРДИНАТНЫЙ СТОЛ | 2010 |
|
RU2472606C2 |
| Многошпиндельный сверлильный станок | 1980 |
|
SU965620A1 |
| Сверлильный станок | 1987 |
|
SU1429452A1 |
| Сверлильный станок | 1982 |
|
SU1047610A2 |
| Сверлильный станок | 1978 |
|
SU770674A1 |
| УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОЙ ЗАПИСИ ДИФРАКЦИОННЫХ СТРУКТУР | 2008 |
|
RU2377615C1 |
| СПОСОБ ПРОИЗВОДСТВА ДЕРЕВОМЕТАЛЛИЧЕСКИХ БАЛОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2254229C2 |
Изобретение относится к координатным устройствам на линейных электродвигателях с программным управлением и может быть использовано в прецизионных станках для раскроя и резки различных листовых материалов, а также для нанесения различного вида рисунков на плоские поверхности. Устройство содержит основание, рабочий стол, источник сжатого воздуха, программный блок управления, две параллельные боковые направляющие, установленные вдоль противоположных сторон основания, портальную балку, установленную с возможностью реверсивного перемещения по направляющим основания, головку с рабочим инструментом, установленную с возможностью реверсивного перемещения вдоль портальной балки, и средства перемещения портальной балки и головки с рабочим инструментом. Последние выполнены в виде боковых и портального линейных электродвигателей, включающих статор и индуктор, при этом статор каждого бокового линейного электродвигателя установлен вдоль боковой направляющей, а статор портального линейного электродвигателя - вдоль портальной балки. Подвижный индуктор каждого линейного электродвигателя снабжен трехсторонними аэростатическими опорами. Концы портальной балки прикреплены к индукторам боковых линейных электродвигателей посредством портальных опор, а на индукторе портального линейного электродвигателя установлена головка с рабочим инструментом При этом одна из портальных опор выполнена в виде подшипникового узла вращения с вертикальной осью, жестко закрепленной на одном из концов портальной балки, а корпус подшипникового узла жестко закреплен на подвижном индукторе соответствующего бокового линейного электродвигателя. Другая портальная опора выполнена в виде подшипникового узла вращения с вертикальной осью, кинематически соединенного с узлом линейного перемещения в плоскости, перпендикулярной оси вращения подшипникового узла, и состоящего из подвижного элемента и направляющих. Корпус упомянутого подшипникового узла жестко закреплен на подвижном индукторе другого бокового линейного электродвигателя, а ось подшипникового узла жестко связана с подвижным элементом узла линейного перемещения, направляющие которого жестко установлены на соответствующем конце портальной балки. Причем узел линейного перемещения снабжен механизмом регулировки зазоров и датчиком линейного перемещения, электрически соединенным с программным блоком управления. Использование такой конструкции ведет к повышению точности и надежности координатного устройства при выполнении рабочих операций. 3 з.п. ф-лы, 4 ил.
| КООРДИНАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2173625C1 |
| Координатный стол | 1987 |
|
SU1493437A1 |
| Двухкоординатный стол с шаговым перемещением | 1985 |
|
SU1433750A1 |
| КООРДИНАТНЫЙ СТОЛ, ПОРТАЛ КООРДИНАТНОГО СТОЛА И СПОСОБ ИЗГОТОВЛЕНИЯ ИНДУКТОРА МНОГОФАЗНОГО ЛИНЕЙНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1998 |
|
RU2133184C1 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН С ШИРОКИМ РАЗБРАСЫВАНИЕМ ИЗМЕЛЬЧЕННОЙ СМЕСИ СОЛОМЫ И ПОЛОВЫ | 2000 |
|
RU2248114C2 |
| Генератор гармонических колебаний | 1986 |
|
SU1384344A1 |

