(Л
I назначенном Для выполнения операций I обработки или сборки. Цель изобрете- I кия - повышение точности останова в I заданных положениях. Для этого двух- Iкоординатный стол, содержащий осно- :вание, рамку 1 продольного перемещения и рамку 2 поперечного перемещени I связанные с механизмами шагового пе- |ремеще1шя и пневмоцилиндрами, снабжен пневмоцилиндрами реверсирования рамок, фиксаторами 24, которые закреплены на основании 4 и на рамке 2 поперечного перемещения, толкателями 25 и установленными на каждой из рамок кулачками рамки и упорами. Механизм шагового перемещения рамки t |выполнен в виде жестко связанных с последней реек 11 и кареток 7, уста- новленных с возможностью перемещения |на рамке 2 поперечного перемещения. Каждая из кареток 7 содержит подпру- |жиненные ведущую собачку 17, фиксирующую собачку 18 и кулачок каретки.
которые размещены на общей оси 16, и планку 20 с отверстием и выступом. На каретках 7 установлены толкатели 25. Устройство механизма шагового перемещения рамки 2 аналогично механизму шагового перемещения рамки 1. Шаговое перемещение рамки 1 осуществляется с помощью ведущих собачек 17 при ходе каретки 7 вперед при выведенных из отверстий реек 11 фиксаторах 24. Выведение последних из отверстий производится посредством толкателей 25 при ходе каретки 7 назад; одновременно с ЭТИМ ведущие собачки 17 входят в зацепление со следующими отверстиями реек 11. В конце хода кареток 7 вперед толкатели 25 освобождают фиксаторы 24, которые фиксируют при этом рамку 1 относительно рамки 2. Такое конструктивное выполнение двухкоординатного стола способствует повышению точности останова в заданных положениях. 7 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для контактной сварки | 1978 |
|
SU764893A1 |
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
| УКЛАДЧИК КИРПИЧА НА ЛЮЛЕЧНЫЙ КОНВЕЙЕР | 1971 |
|
SU320380A1 |
| Устройство для укладки в тару стержнеобразных предметов | 1982 |
|
SU1076360A1 |
| Устройство кривовязюков для вырубкизАгОТОВОК из пОлОСОВОгО илЕНТОчНОгО МАТЕРиАлА | 1979 |
|
SU804501A1 |
| Устройство для подачи полосового материала в рабочую зону пресса | 1986 |
|
SU1371746A1 |
| Автомат-укладчик кирпича-сырца на сушильные рамки | 1983 |
|
SU1150084A1 |
| Устройство для укладки ампул в кассету | 1988 |
|
SU1622224A1 |
| Устройство для поштучной выдачи изделий | 1986 |
|
SU1425042A1 |
| Камера для фотосъемки на листовую пленку | 1980 |
|
SU1120275A1 |
Изобретение относится к машиностроению, а именно к механизмам, обеспечивающим линейные шаговые перемещения по двум осям координат, и может быть использовано в технологическом автоматизированном оборудовании,пред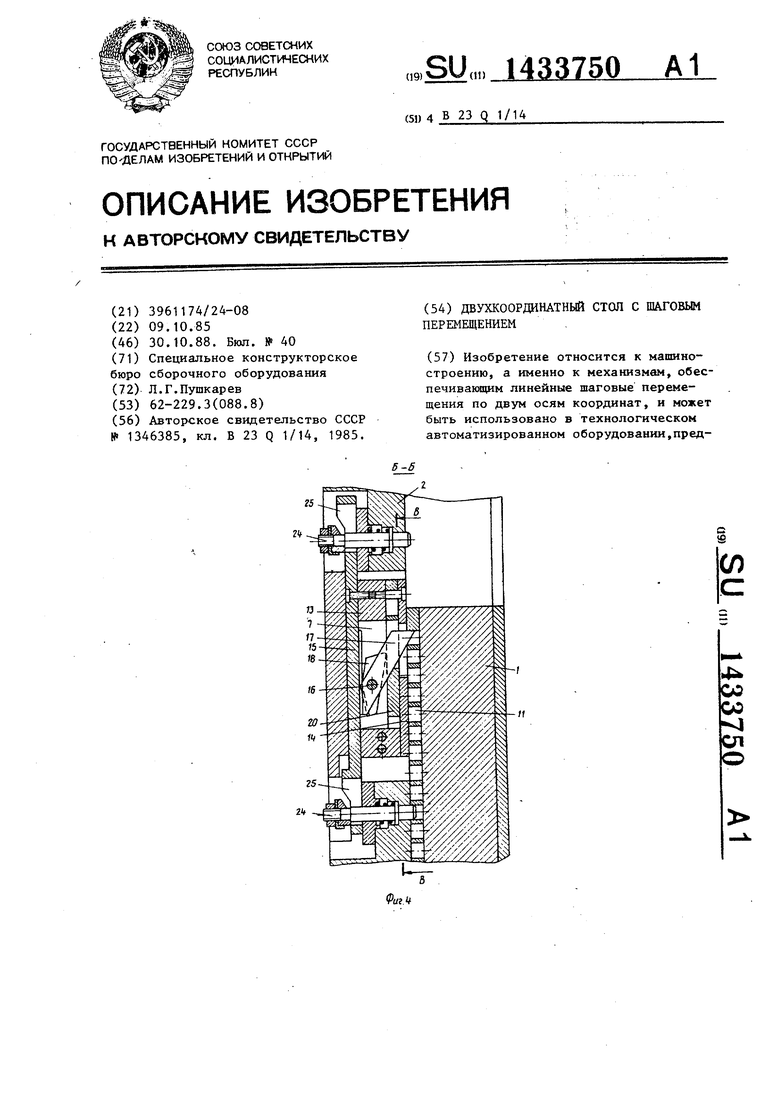
1
Изобретение относится к машиностроению, а именно к механизмам,обеспечивающим линейные шаговые перемеще- иия по двум осям координат, и может 5ыть использовано в технологическом автоматизированном оборудовании, предназначенном для выполнения операций обработки или сборки.
) Цель изобретения - повышение точ- 0 ости останова в заданных положениях.
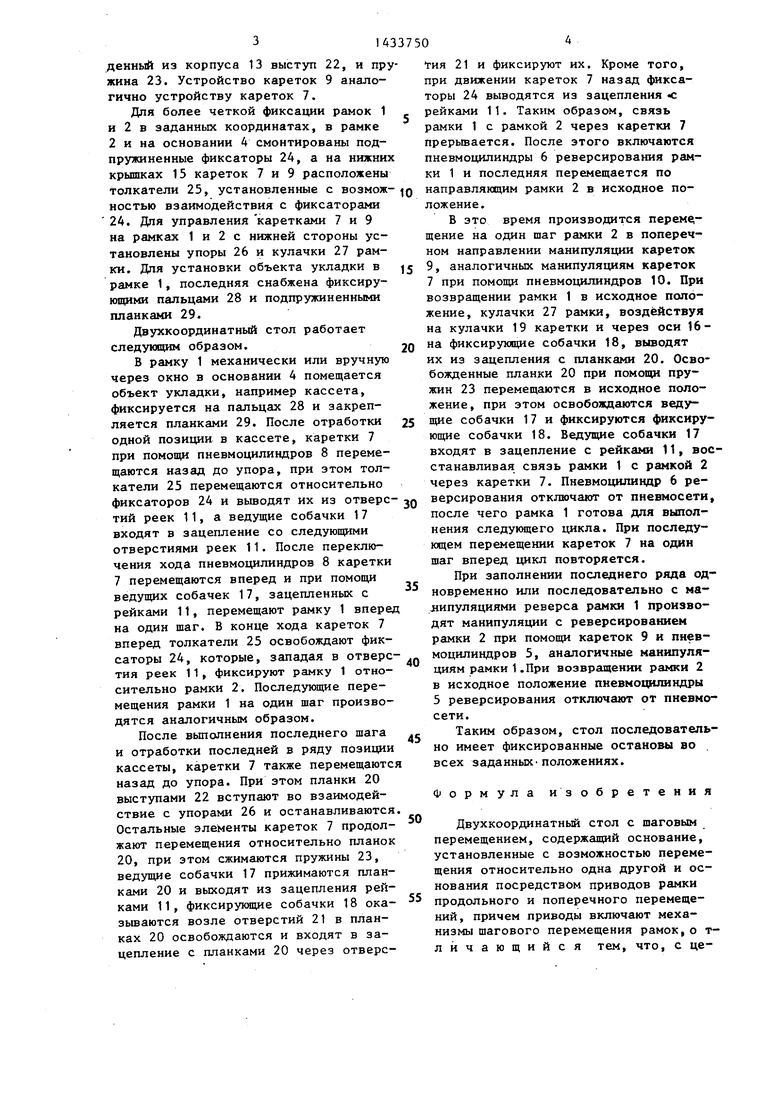
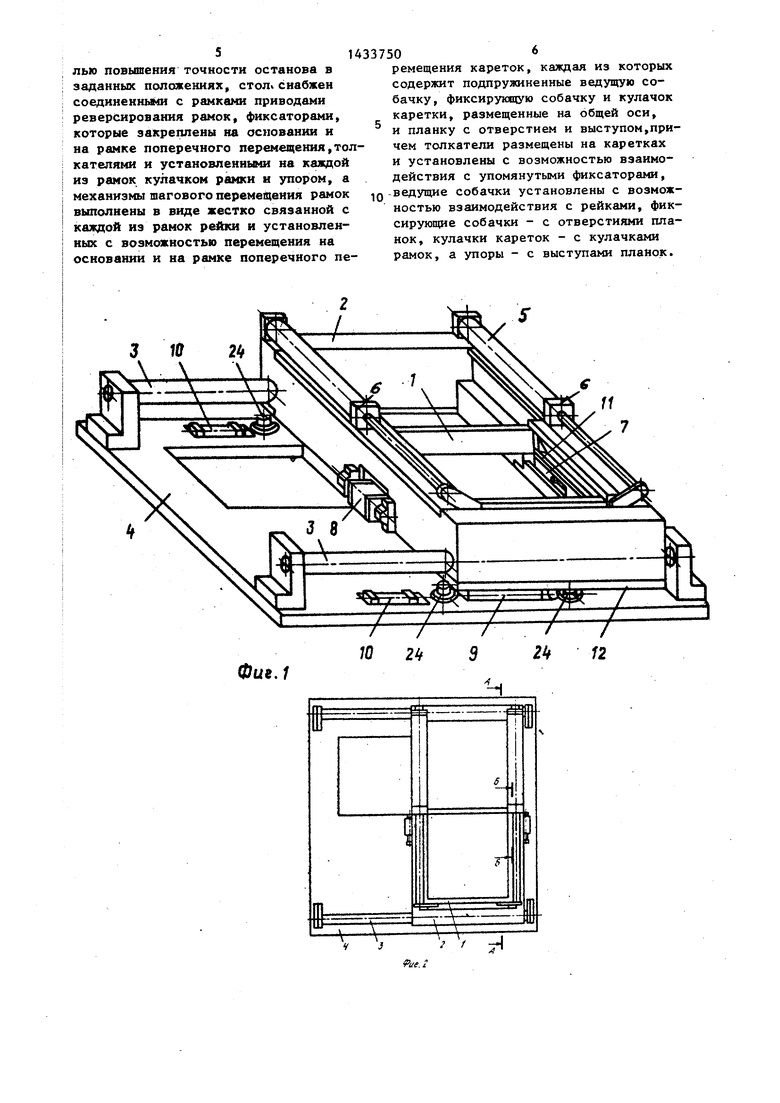
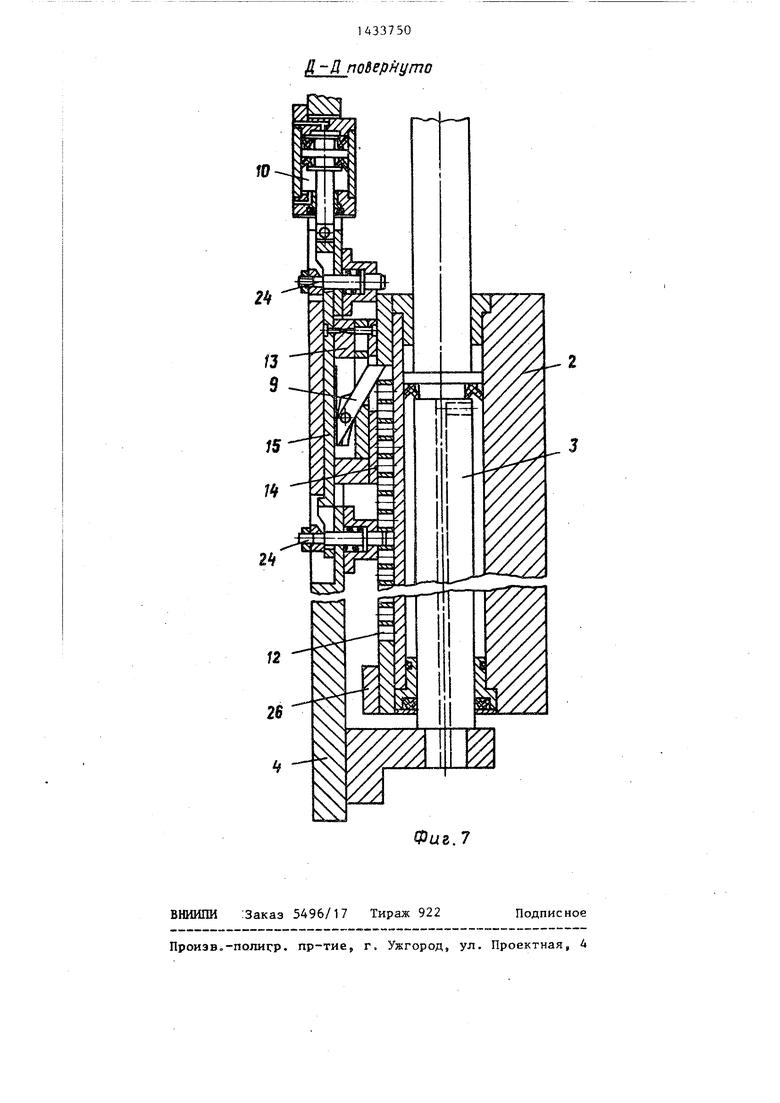
На фиг. 1 схематично изображен двух- Цоординатный стол; на фиг. 2 - то же, ид в плане; на фиг. 3 - разрез А-А Йа фиг. 2; на фиг. 4 - разре Б-Б на t5 г. 2 (механизм продольного переме- 1|цения рамки 1); на фиг. 5 - разрез -В на фиг. 4 на фиг. 6 - разрез Г-Г ijia фиг. 5; на фиг. 7 - разрез Д-Д на фиг. 2 (механизм поперечного переме- 20 1|цения рамки 2 с приводом реверсирова- Кшя) .
Двухкоординатный стол содержит 1 продольного перемещения и рам- licy 2 поперечного перемещения. Рамка 1 25 установлена с возможностью перемещения по продольньм направляющим рамки i, а рамка 2 - по поперечньм направляющим 3, закрепленным на основании 4. В рамку 2 встроены пневмоцилиндры 5 реверсирования рамки 2, штоками которых являются направлякнцие 3. На рамке 1 закреплены пневмоцилиндры 6 реверсирования рамки 1.
Для осуществления шагового перемещения рамки 1, в рамке 2 установлены с возможностью продольного перемещения две каретки 7 с пневмоцилиндрами 8. Для шагового перемещения рамки 2 на основании 4 установлены с возможностью перемещения две каретки 9 с пневмоцилиндрами 10.
Для взаимодействия с каретк;ами 7 и 9 на рамках 1 и 2 с нижней стороны закреплены рейки 11 и 12.
Каждая из кареток 7 состоит из корпуса 13, верхней крьшши 14 и нижней крышки 15. В корпусе 13 на общей оси 16 размещены ведущая собачка 17, фиксирующая собачка 18, ас наружной части корпуса - кулачок 19 каретки, причем фиксирующая собачка 18 и кулачок 19 каретки закреплены на оси 16. Кроме того, в корпусе 13 размещены планка 20 с отверстием 21, имеющая выве
314
денный из корпуса 13 выступ 22, и пржина 23. Устройство кареток 9 аналогично устройству кареток 7.
Для более четкой фиксации рамок 1 и 2 в заданных координатах, в рамке 2 и на основании 4 смонтированы подпружиненные фиксаторы 24, а на нижни крышках 15 кареток 7 и 9 расположены толкатели 25, установленные с возмож ностью взаимодействия с фиксаторами 24. Для управления каретками 7 и 9 на рамках 1 и 2 с нижней стороны установлены упоры 26 и кулачки 27 рамки. Для установки объекта укладки в рамке 1, последняя снабжена фиксиру- Ю1ЦИМИ пальцами 28 и подпружиненными планками 29.
Двухкоординатный стол работает следующим образом.
В рамку 1 механически или вручную через окно в основании 4 помещается объект укладки, например кассета, фиксируется на пальцах 28 и закрепляется планками 29. После отработки одной позиции в кассете, каретки 7 при помощи пневмоцилиндров 8 перемещаются назад до упора, при этом толкатели 25 перемещаются относительно фиксаторов 24 и вьшодят их из отверс тий реек 11, а ведущие собачки 17 входят в зацепление со следующими отверстиями реек 11. После переключения хода пневмоцилиндров 8 каретки 7 перемещаются вперед и при помощи ведущих собачек 17, зацепленных с рейками 11, перемещают рамку 1 впере на один шаг. В конце хода кареток 7 вперед толкатели 25 освобождают фиксаторы 24, которые, западая в отверстия реек 11, фиксируют рамку 1 относительно рамки 2. Последующие перемещения рамки 1 на один шаг производятся аналогичным образом.
После выполнения последнего шага и отработки последней в ряду позиции кассеты, каретки 7 также перемещаютс назад до упора. При этом планки 20 выступами 22 вступают во взаимодействие с упорами 26 и останавливаются Остальные элементы кареток 7 продолжают перемещения относительно планок 20, при этом сжимаются пружины 23, ведущие собачки 17 прижимаются планками 20 и выходят из зацепления рейками 11, фиксирукицие собачки 18 ока- зьшаются возле отверстий 21 в планках 20 освобождаются и входят в зацепление с планками 20 через отверс
5
0
5
Q
Q
35
40
45
50
55
Тин 21 и фиксируют их. Кроме того, при движении кареток 7 назад фиксаторы 24 выводятся из зацепления «с рейками 11. Таким образом, связь рамки 1 с рамкой 2 через каретки 7 прерьтается. После этого включаются пневмоцилиндры 6 реверсирования рамки 1 и последняя перемещается по направляющим рамки 2 в исходное положение.
В это время производится переме;- щение на один шаг рамки 2 в поперечном направлении манипуляции кареток 9, аналогичных манипуляциям кареток 7 при помощи пневмоцилиндров 10. При возвращении рамки 1 в исходное положение, кулачки 27 рамки, воздействуя на кулачки 19 каретки и через оси 16- на фиксирукщие собачки 18, выводят их из зацепления с планками 20. Освобожденные планки 20 при помощи пружин 23 перемещаются в исходное положение, при этом освобождаются ведущие собачки 17 и фиксируются фиксирующие собачки 18. Ведущие собачки 17 входят в зацепление с рейками 11, восстанавливая связь рамки 1 с рамкой 2 через каретки 7. Пневмоцилиндр 6 реверсирования отключают от пневмосети, после чего рамка 1 готова для выполнения следукицего цикла. При последующем перемещении кареток 7 на один шаг вперед цикл повторяется.
При заполнении последнего ряда одновременно или последовательно с ма- якпуляцкями реверса рамки 1 производят манипуляции с реверсированием рамки 2 при помощи кареток 9 и пневмоцилиндров 5, аналогичные манипуляциям рамки 1 .При возвращении рамки 2 в исходное положение пневмоцклиндры 5 реверсирования отключают от пневмо- сети.
Таким образом, стол последовательно имеет фиксированные остановы во всех заданных положениях.
Формула изобретения
Двухкоординатный стол с шаговым перемещением, содержащий основание, установленные с возможностью перемещения относительно одна другой и основания посредством приводов рамки продольного и поперечного перемещений, причем приводы включают механизмы шагового перемещения рамок,о т- лйчающийся тем, что, с целью повышения точности останова в заданных положениях, стол снабжен соединеншши с рамкани приводами реверсирования рамок, фиксаторами, которые закреплены на основании и на рамке поперечного перемещения,толкателями и установленными на каждой из рамок кулачком рамки и упором, а механизмы шагового перемещения рамок выполнены в виде жестко связанной с каждой из рамок рейки и установленных с возможностью перемещения на основании и на рамке поперечного пеvV
Л:
Фие./
37506
ремещения кареток, каждая из которых содержит подпружиненные ведущую собачку, фиксирующую собачку н кулачок каретки, размещенные на общей оси, и планку с отверстием и выступом,причем толкатели размещены на каретках и установлены с возможностью взаимодействия с упомянутыми фиксаторами, ведущие собачки установлены с возможностью взаимодействия с рейками, фиксирующие собачки - с отверстиями планок, кулачки кареток - с кулачками рамок, а упоры - с выступами планок.
10
6
ff
Г Г
Фиг.5
10
| Двухкоординатный стол | 1985 |
|
SU1346385A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
