Предлагаемое изобретение относится к системам управления судами на подводных крыльях, в частности к системам стабилизации движения судов, оборудованных глубокопогруженными крыльями.
Известны два типа подводных крыльев: полупогруженные и глубокопогруженные (полнопогруженные).
Первые из них имеют преимущественно V-образную форму, и стабилизация движения судна с такими крыльями в известных пределах происходит автоматически, поскольку крыло, работая одновременно в двух средах (вода и воздух), различающихся по плотности на несколько порядков, автоматически парирует возникающие при движении как крен, так и дифферент судна (по мере погружения в воду находящиеся в воздухе части крыла увеличивают его подъемную силу). Однако на волнении такие суда склонны к рысканью и раскачиванию.
В отличие от первых глубокопогруженное крыло при любой его форме постоянно работает под поверхностью воды, т.е. в однородной среде. Благодаря этому судно на глубокопогруженных крыльях имеет повышенную комфортность, а поскольку в движении корпус судна приподнят над поверхностью воды на достаточную высоту, то комфортность у многих таких судов сохраняется при высоте волны до 3-х метров.
Однако полнопогруженные крылья сами принципиально не могут устранить возникающие на ходу ни крен, ни дифферент судна, поэтому они снабжаются рулевыми поверхностями (по аналогии с аэродинамическими рулями высоты летательного аппарата). Поскольку скорость движения судна велика (до 60 узлов), то скорость нарастания и крена, и дифферента превышает скорость реакции капитана (рулевого), поэтому суда на глубокопогруженных крыльях снабжаются бортовыми компьютерами (ЭВМ), перерабатывающими сигналы от датчиков, характеризующих положение (курс, крен, дифферент) и состояние (движение-покой) судна и выдающих переработанные сигналы в виде управляющих сигналов на исполнительные механизмы рулевых поверхностей подводных крыльев, парируя тем самым внешние возмущающие воздействия на судно (см., например, авт. св. №713314, 1461231, МПК G 05 D 1/00 и др.).
Общим недостатком всех известных систем стабилизации движения судов на полнопогруженных крыльях является то, что возмущения воздействуют на крылья, работающие в одной среде и отстоящие от возмущенной поверхности (вода), а характеристики возмущающих воздействий снимаются с корпуса судна, находящегося в другой среде (воздух), не сопоставимой по плотности с первой, что в ряде случаев приводит к рассогласованию между требуемыми и фактическими сигналами, поступаемыми на рулевые поверхности крыльев. Например, из известных датчиков, определяющих состояние и положение корпуса судна над водой, наибольшее распространение получили гироскопические датчики, которые по сравнению с другими датчиками (инерционными, гравитационными и др.) обладают наибольшей чувствительностью и точностью. Однако гироскопические датчики имеют принципиальный недостаток, суть которого в том, что они регистрируют только изменение угла наклона их осей, но никак не отражают ни продольное, ни плоскопараллельное перемещение оси гироскопа. Применительно к судну на подводных крыльях это означает, что гироскопические датчики, установленные на корпусе судна по трем осям системы прямоугольных координат, будут отслеживать только изменение курса, крена и дифферента судна, но никак не зафиксируют его боковое скольжение, обусловленное боковым скольжением крыла (например, на волне), хотя в этом случае крыло будет подвергаться возмущающим воздействиям, и режим его движения в водной среде с очевидностью изменится. Другими словами, для повышения качества стабилизации движения судна на подводных крыльях следует проводить не косвенные, а прямые измерения, т.е. регистрировать положение и состояние не корпуса судна, а несущих его подводных крыльев относительно потока воды. Целесообразность именно такой регистрации особенно видна на примере судна, оборудованного раздельными крыльями наряду с крыльями, установленными поперек корпуса по всей его ширине (характерно для крупнотоннажных судов). Боковые крылья при повороте (циркуляции) судна имеют разную скорость, поскольку за одно и то же время проходят разный путь: одно по внешнему, другое по внутреннему кругу циркуляции. Очевидно, что при разных скоростях движения внешнего и внутреннего крыльев (или внешней и внутренней оконечности единого крыла) положение и состояние корпуса судна с неизбежностью изменятся (при стечении некоторых режимов возникает скольжение судна к центру или от центра циркуляции).
На устранение этой проблемы направлено устройство по патенту №30201 на полезную модель "Система стабилизации движения судна на подводных крыльях", МПК G 05 D 1/00, приоритет 17.12.02.
Известное устройство содержит установленные непосредственно на подводном крыле датчики его скорости и глубины погружения, подключенные к бортовой (судовой) ЭВМ, выдающей переработанные сигналы датчиков на исполнительные механизмы подводных крыльев в виде управляющих сигналов.
Поскольку указанные два датчика конструктивно выполнены в виде датчиков статического и динамического давления, функции которых пересекаются, ни один их них не может быть однозначно отнесен к измерителю той или иной величины, то формально более корректным будет функциональное определение этих датчиков как "средств для определения скорости и глубины погружения подводного крыла".
Недостаток известного устройства заключается в ограниченности его возможностей, поскольку кроме воздействий на крыло, связанных с его скоростью и глубиной погружения, крыло испытывает ряд других возмущающих воздействий.
Перед заявленным изобретением была поставлена задача воздействовать на рулевую поверхность крыла, исходя из возмущающих воздействий окружающей среды непосредственно на само крыло, т.е. измерять причину (отклонение крыла), а не следствие (отклонение корпуса судна).
Поставленная задача решается тем, что предложено судовое подводное крыло, по меньшей мере, с одной рулевой поверхностью, на котором смонтированы средства определения его скорости и глубины погружения. Сигналы этих средств, переработанные бортовой ЭВМ, поступают в виде управляющих сигналов на исполнительные механизмы рулевой поверхности.
Новым в предложенном крыле является то, что на нем дополнительно смонтированы средства определения величины его бокового скольжения и угла атаки.
Технический результат заявленного устройства заключается в повышении качества стабилизации движения судна на подводных крыльях.
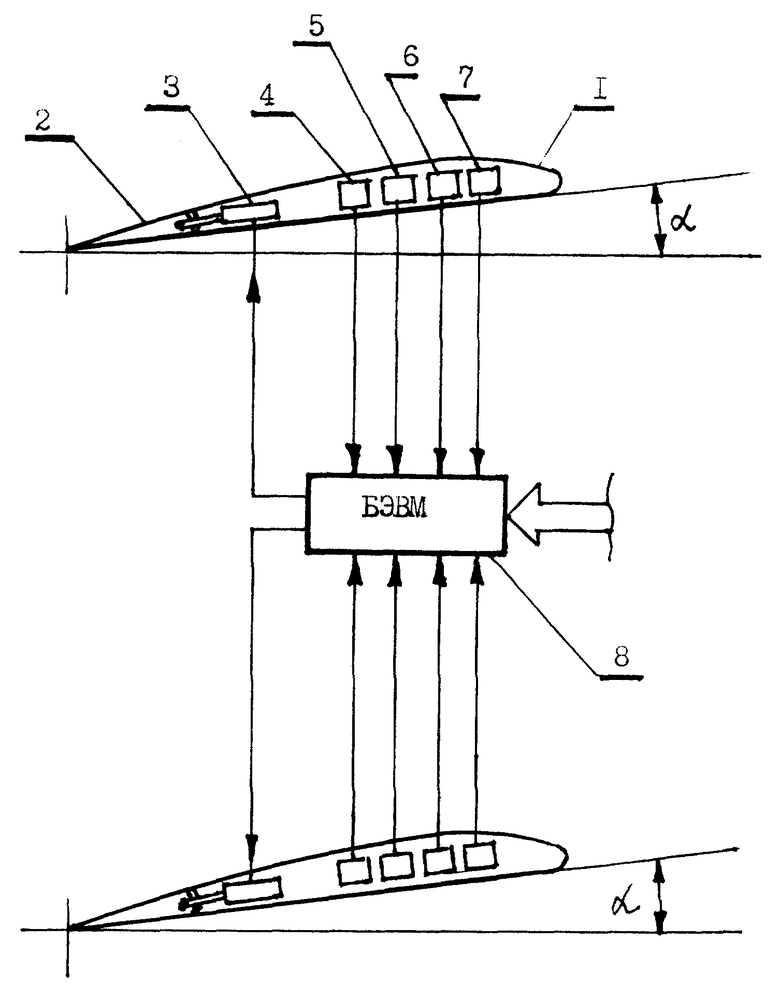
На чертеже показана схема заявленного устройства.
В заявленном устройстве на судовом подводном крыле 1, оборудованном, по меньшей мере, одной рулевой поверхностью 2 с исполнительным механизмом 3 ее привода, смонтированы датчик 4 скорости движения крыла относительно водной среды, датчик 5 бокового скольжения крыла относительно водной среды, датчик 6 глубины погружения крыла относительно водной поверхности и датчик 7 угла α атаки крыла к набегающему потоку воды. Все датчики связаны электрическими каналами с входами бортовой ЭВМ 8 (БЭВМ) на корпусе судна. Исполнительный механизм 3 каждой рулевой поверхности 2 связан с соответствующим выходом БЭВМ 8. Поскольку судно оборудуется несколькими подводными крыльями (в простейшем случае двумя, носовым и кормовым), то указанные датчики монтируются на каждом из крыльев, а при необходимости дублируются на одном крыле в соответствии с количеством рулевых поверхностей на нем. Наличие датчиков 4-7 на крыльях не исключает других датчиков для определения положения и состояния корпуса судна, монтируемых на его борту и также подключенных к БЭВМ.
Работает устройство следующим образом.
С началом движения судна набегающий на крыло 1 поток воды воздействует на датчики 4-7, регистрирующие сигналы от которых подаются на БЭВМ 8, обрабатываются и в виде командных сигналов, подаются на исполнительные механизмы рулевых поверхностей 2, которые парируют возмущающие воздействия на крылья.
Очевидно, что рулевые поверхности одного отдельного крыла не могут парировать множество разнообразных возмущающих воздействий и стабилизировать его движение. Стабилизация каждого отдельного крыла возможна только потому, что командный сигнал на каждую рулевую поверхность вырабатывается ЭВМ с учетом регистрирующих сигналов всех других датчиков, установленных на остальных крыльях судна.
Поскольку между датчиками всех крыльев (как и между датчиками крыльев и датчиками на корпусе судна) существуют перекрестные связи, то в ряде случаев невозможно охарактеризовать, какой из датчиков несет какую конкретную функцию (подобно тому, как в устройстве-прототипе совокупность гидростатических и гидродинамических датчиков в одном случае служит для определения глубины погружения, а в другом - скорости крыла). Поэтому формально корректным будет определение установленных на крыльях датчиков как средств для определения величин тех или иных показателей положения и состояния крыла.
Конструктивное выполнение в заявленном изобретении датчиков несущественно потому, что из уровня техники известно множество широко распространенных устройств, способных выполнять функции используемых в заявленном изобретении средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| БУКСИРУЕМОЕ УСТРОЙСТВО ДЛЯ КАРТОГРАФИРОВАНИЯ ОБЪЕКТОВ МОРСКОГО ДНА И ИХ ВИЗУАЛЬНОЙ ЗАВЕРКИ | 2018 |
|
RU2679922C1 |
Изобретение относится к судостроению и может быть использовано для создания систем стабилизации движения судов, оборудованных глубокопогруженными крыльями. Судовое подводное крыло содержит смонтированные на нем средства определения его скорости и глубины погружения, подключенные к бортовой электронно-вычислительной машине. На крыле дополнительно смонтированы средства определения величины его бокового скольжения и угла атаки, также подключенные к электронно-вычислительной машине. Технический результат реализации изобретения заключается в повышении качества стабилизации движения судна на подводных крыльях. 1 ил.
Судовое подводное крыло, содержащее смонтированные на нем средства определения его скорости и глубины погружения, подключенные к бортовой электронно-вычислительной машине, отличающееся тем, что на крыле дополнительно смонтированы также подключенные к электронно-вычислительной машине средства определения величины его бокового скольжения и угла атаки.
| Устройство для остановки машины или для сигнализации при обрыве нити на Рашель-машине | 1928 |
|
SU30201A1 |
| Поддон | 1980 |
|
SU962116A1 |

