Изобретение относится к области неразрушающих испытаний материалов и изделий ультразвуковыми методами и может быть использовано для определения формы дефектов и их пространственного положения, например, раковин, шлаковых включений и т.д., а также измерения толщины контролируемого объекта со сложной формой поверхности.
Аналогами предлагаемого изобретения являются различные варианты способов и устройств для ультразвукового контроля качества материалов и изделий, реализованные в патентах:
- RU 2000104686 “Способ определения размеров дефектов при ультразвуковом контроле изделий”, опубликованный 2001.12.27 [1];
- RU 99115325 “Ультразвуковой способ контроля изделий и материалов”, опубликованный 2001.05.20 [2];
и описанные, например, в [3], где для формирования акустического изображения контролируемого объекта в нем возбуждают ультразвуковые колебания, сконцентрированные вдоль узкого луча. Далее перемещают луч в исследуемом пространстве и получают совокупность эхо-сигналов, которую преобразуют в многомерный электрический сигнал, являющийся электрическим эквивалентом акустического изображения отражающей поверхности объекта.
Недостатком аналогов предлагаемого изобретения является невысокая разрешающая способность по поперечным координатам, ограниченная шириной диаграммы направленности передающего и приемного пьезопреобразователей, которая изменяется в зависимости от расстояния до отражающей точки контролируемого объекта.
Наиболее близким аналогом, прототипом, предлагаемого изобретения является способ формирования акустического изображения SAFT, основанный на методологии синтезирования апертуры, описанный в [4]. Здесь для формирования акустического изображения передающим пьезопреобразователем с широкой диаграммой направленности излучения возбуждают ультразвуковые колебания в исследуемом объекте. При приеме отраженных акустических волн приемным пьезопреобразователем его последовательно располагают в различных точках на поверхности этого объекта и запоминают принятые сигналы. Далее контролируемый объем разбивают на маленькие кубики (локальные области) и каждый из них рассматривают как сосредоточенный отражающий элемент: эхо-сигналы, принятые в каждом из положений приемного пьезопреобразователя, сдвигают назад во времени на величину, равную времени распространения отраженной волны от рассматриваемой локальной области до соответствующего положения приемного пьезопреобразователя, затем суммируют сдвинутые во времени сигналы для каждой локальной области исследуемого объекта и определяют амплитуду суммарного сигнала для каждой из этих областей. Акустическое изображение контролируемого объекта формируют в виде значений амплитуд суммарых сигналов, соответственно, для каждой локальной области контролируемого объекта.
Недостатком прототипа является искажение формируемого акустического изображения из-за разбросов скорости распространения акустической волны в исследуемом материале от образца к образцу, которые зависят от ряда факторов [4]:
- состава материала,
- особенностей кристаллической структуры материала,
- пористости,
- условий изготовления и т.д
Разброс значений скорости распространения акустических волн в материале может быть значительным и по данным, приведенным в [4], достигать 10-20%. Так у отливок из чугуна при изменении содержания углерода от 2,71 до 3,16% скорость изменяется от 4,7 до 4,1 км/сек. При незначительном изменении химического состава легкого сплава Al-Mg-Si скорость изменяется от 6,72 до 5,7... 5,4 км/сек. В бетоне в зависимости от состава и пористости скорость изменяется от 3,6 до 4,6 км/сек. В образцах изоляторов для высоковольтных ЛЭП, изготовленных разными производителями, скорость изменяется от 5,6 до 6,11 км/сек. В таблице приведены оценочные значения разбросов скорости распространения акустических волн в различных материалах.
Указанные разбросы скорости распространения акустических волн в различных материалах достаточно существенно влияют на точность формирования звукового изображения объектов при реализации способа SAFT, использующего методологию синтезирования апертуры. При формировании изображения согласно прототипу осуществляется коррекция времени запаздывания принятых эхо-сигналов в зависимости от расстояния между каждым из положений приемного пьезопреобразователя и выделенной локальной областью контролируемого объекта. При этом считают, что скорость распространения V0 известна априори и не меняется в материале, из которого выполнены образцы контролируемого объекта. В действительности, из-за возможного непостоянства скорости распространения в материале от образца к образцу истинное значение скорости Vi в конкретном образце может отличаться от V0. В результате формируемое изображение оказывается искаженным. Например, из-за отклонения скорости распространения Vi от V0, на величину δ v=Δ V/V точечный отражатель, расположенный на глубине zi симметрично относительно крайних положений приемного пьезопреобразователя, на формируемом изображении будет представлен точкой, смещенной от действительного положения на величину Δ z0≈δ vL, где L - расстояние между крайними положениями приемного пьезопреобразователя. Поскольку разброс скоростей распространения акустических волн у многих материалов значителен, а разрешающая способность способа формирования акустического изображения SAFT составляет величину порядка длины волны, отмеченные искажения изображения являются существенными.
Сущность предлагаемого изобретения заключается в том, что в известном способе уменьшают искажения акустического изображения контролируемого объекта, вызванные разбросом скорости распространения акустической волны в объекте от образца к образцу. Для этого передающим пьезопреобразователем с широкой диаграммой направленности излучения возбуждают ультразвуковые колебания в исследуемом объекте, производят прием отраженных колебаний приемным пьезопреобразователем, который последовательно располагают в различных точках на поверхности контролируемого объекта, после акустоэлектронного преобразования и усиления сигналов их запоминают и затем обрабатывают, для чего контролируемый объект разбивают на локальные области, которые рассматривают в качестве локального сосредоточенного отражающего элемента; затем отраженные сигналы, принятые в каждом из положений приемного пьезопреобразователя от каждой из локальных областей, сдвигают назад во времени на величину, равную времени распространения отраженной волны от рассматриваемой локальной области до соответствующего положения приемного пьезопреобразователя, и суммируют сдвинутые во времени сигналы соответственно для каждой из локальных областей; указанные выше процедуры выполняют для двух частотных вариантов, в каждом из которых частоты акустических волн, используемые при ультразвуковом контроле, различны; для каждого из вариантов формируют М предварительных изображений в виде значений амплитуд суммарных сигналов, соответствующих различным локальным областям контролируемого объема и определенных для различных предполагаемых значений скорости распространения волны в материале М; затем проводят попарное сравнение каждой из М пар предварительных изображений, определенных для каждого частотного варианта при одинаковых значениях скорости распространения, выбирают среди них пару изображений, наименее отличающихся друг от друга, и формируют окончательное акустическое изображение контролируемого объекта в виде их полусуммы.
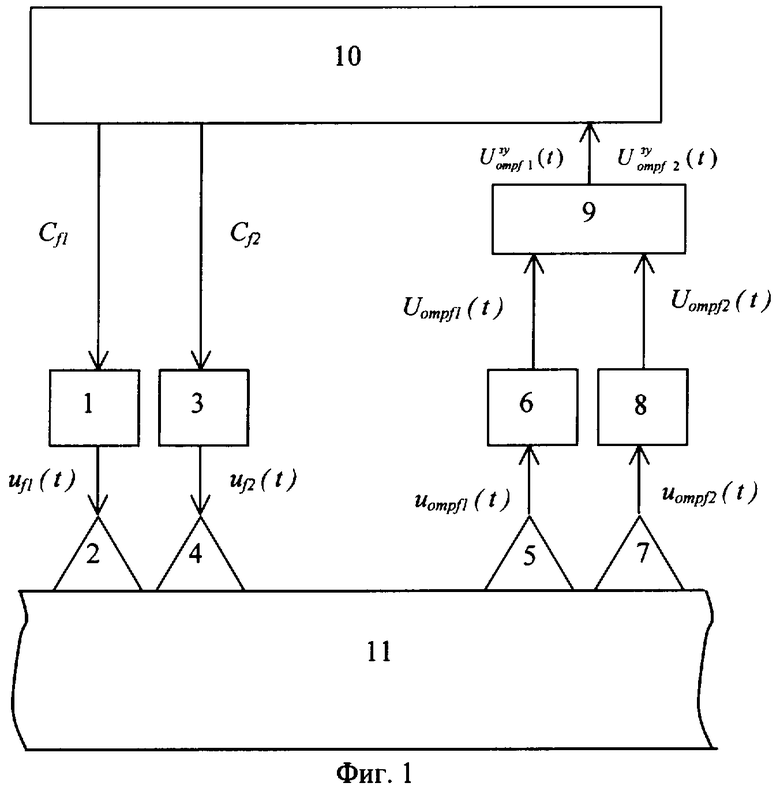
На фиг.1 изображена укрупненная функциональная схема устройства, реализующего заявляемый способ формирования акустического изображения контролируемого объекта.
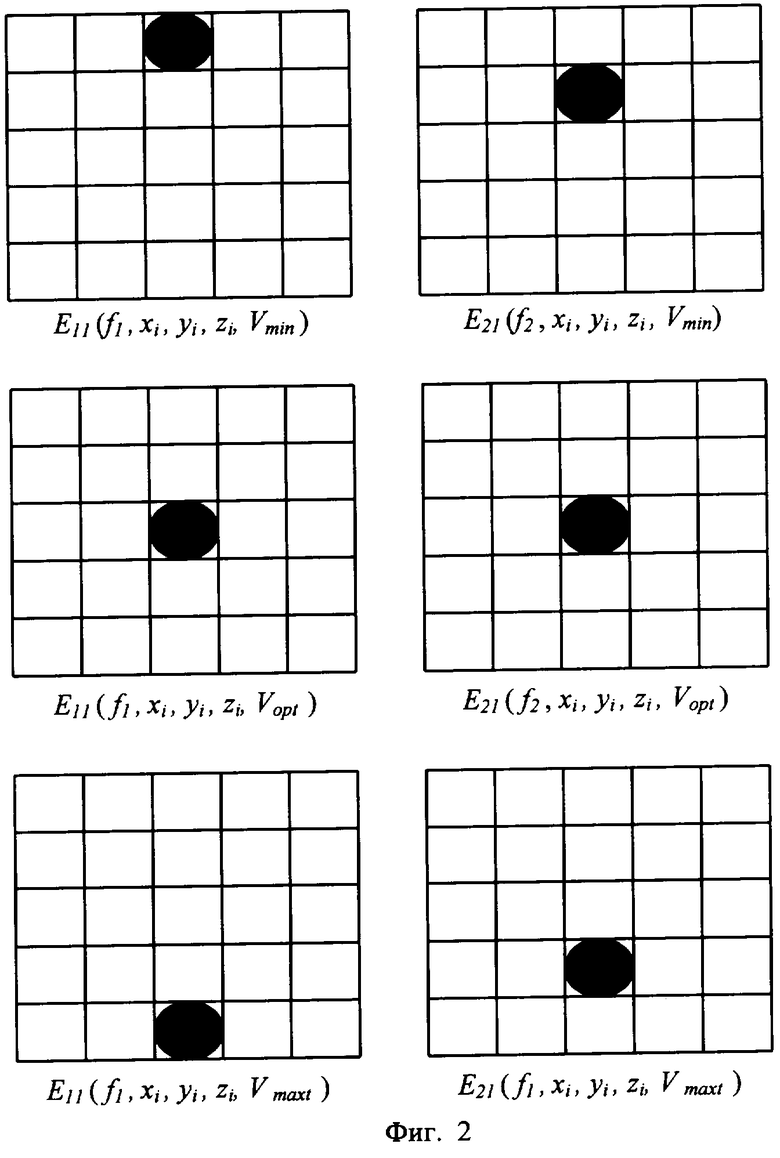
На фиг.2 приведены примеры пар предварительных изображений, сформированных с применением алгоритма вычислительных операций, которые выполняют при формировании акустического изображения контролируемого объекта.
На фиг.3 представлен один из возможных вариантов реализации алгоритма работы электронно-вычислительного блока, реализующего заявляемый способ формирования акустического изображения контролируемого объекта.
Устройство содержит генератор 1, выход которого соединен со входом передающего пьезопреобразователя 2, генератор 3, выход которого соединен со входом передающего пьезопреобразователя 4, приемный пьезопреобразователь 5, выход которого соединен с приемным устройством 6, приемный пьезопреобразователь 7, выход которого соединен с приемным устройством 8. Приемные пьезопреобразователи 5 и 7 конструктивно обеспечивают их перемещение по поверхности контролируемого объекта 11. Выходы приемных устройств 6 и 8 соединены с первым и вторым входами запоминающего устройства 9, выход которого подключен ко входу электронно-вычислительного блока 10, к первому и второму выходам которого подключены, соответственно, входы генераторов 1 и 3.
Если на первом выходе электронно-вычислительного блока 10 присутствует команда Cf1, обеспечивающая включение генератора 1, то в генераторе 1 формируют сигнал Uf1 (t) частотой f1, который поступает на вход передающего пьезопреобразователя 2, обеспечивающего возбуждение ультразвуковых колебаний в контролируемом объекте 11 с частотой f1. В этом случае на выходе генератора 3 сигнал uf2 (t) отсутствует. При появлении на втором выходе электронно-вычислительного блока 10 команды Cf2, которая обеспечивает включение генератора 3, в генераторе 3 формируют сигнал uf2(t) с частотой f2, который поступает на вход передающего пьезопреобразователя 4, обеспечивающего возбуждение ультразвуковых колебаний в контролируемом объекте 11 с частотой f2. В этом случае на выходе генератора 1 сигнал ufl (t) отсутствует. Сформированные в контролируемом объекте 11 отраженные акустические волны принимают приемными пьезопреобразователями 5 и 7, в которых осуществляют акустоэлектронное преобразование акустических волн в электрические сигналы, соответственно, uотрfl (t) с частотой f1 и uоmpf2 (t) с частотой f2. Далее эти сигналы поступают, соответственно, на входы приемных устройств 6 и 8, в которых производят их усиление и затем аналого-цифровое преобразование. С выхода приемных устройств 6 и 8 цифровые сигналы uompf1 (t) и uompf2 (t) поступают, соответственно, на первый и второй входы запоминающего устройства 9, из которого производят выборки сигналов U
Алгоритм обработки сигналов U
R(xi, уi, zi, ξ n, γ n)/Vиcт,
где R (хi, уi, zi, ξ n, γ n) - расстояние между указанными точками.
Из-за различия истинного значения скорости Vиcт и предполагаемого Vmin в действительности компенсируется временное запаздывание, равное
R(xi, yi, zi, ξ n, γ n)/Vmin.
Если истинное значение скорости распространения Vucm не равно предполагаемому (в данном случае Vmin), каждое из сформированных предварительных изображений E11 (f1, хi, уi, zi, Vmin) и Е21 (f2, хi, уi, zi, Vmin) окажется искаженным по отношению к действительному, причем различным образом.
Затем выбирают другое значение предполагаемой скорости распространения, равное Vj=Vmin+Δ , и повторяют операции сдвига по времени и суммирования сигналов, описанные выше, в тех же локальных областях с координатами (хi, уi, zi,) для каждого частотного варианта. В результате проведения этих процедур формируют и запоминают вторую пару предварительных изображений E12 (f1, хi, уi, zi, Vmin+Δ ) и Е22 (f2, хi уi, zi, Vmin+Δ ), соответствующую скорости распространения акустической волны в материале Vj=Vmin+Δ .
После этого снова изменяют значение предполагаемой скорости распространения на величину mΔ , формируют и запоминают следующую пару предварительных изображений Е1m (f1, хi, уi, zi, Vmin+mΔ ) и Е2m (f2, хi, уi, zi, Vmin + mΔ ). Процесс повторяют до тех пор, пока значение предполагаемой скорости не выйдет за известные пределы [Vmin, Vmax].
После завершения операций перебора скоростей распространения проводят сравнение пар предварительных изображений, сформированных в обоих частотных вариантах при равных предполагаемых значениях скорости распространения Vj, например, путем вычисления отклонения одного от другого:
 ε (V)=| E1(xi, уi, zi, Vj)-E2(xi, yi, zi, Vj)| .
ε (V)=| E1(xi, уi, zi, Vj)-E2(xi, yi, zi, Vj)| .
Затем находят такую пару Е1m (f,, хi, уi, zi, Vopt) и Е2m (f2, хi, уi, zi, Vopt), для которой отличия предварительных изображений, сформированных в обоих частотных вариантах, минимально. Определенное в результате вышеописанных процедур предполагаемое значение скорости распространения Vopt мало отличается от действительного Vиcт. Поэтому предварительные изображения E1m (f1, хi, уi, zi, Vopt) и E2m (f2, хi, уi, zi, Vopt) являются наиболее близкими к действительному акустическому изображению контролируемого объекта. На заключительном шаге процедуры обработки согласно заявляемому способу формируют искомое акустическое изображение контролируемого объекта E(xi, уi, zi) как среднее из изображений E1m (f1, xi, уi, zi, Vopt) и Е2m (f2, xi, уi, zi, Vopt), т.е.
Е (xi, уi, zi)=E1m (f1, xi, уi, zi, Vopt)+Е2m (f2, xi, уi, zi, Vopt)/2.
Предложенный способ формирования акустического изображения контролируемого объекта, описанный выше, обеспечивает уменьшение искажений вследствие разбросов скорости распространения акустической волны в исследуемом материале от образца к образцу, если указанные выше процедуры выполняют для N частотных вариантов, в каждом из которых частоты акустических волн, используемые при ультразвуковом контроле, различны, при формировании акустического изображения используют N предварительных изображений для каждого из Мi предполагаемых значений скорости распространения акустической волны в материале; из полученных оценок выбирают предполагаемое значение скорости Mopt, при которой N предварительных изображений наименее отличаются друг от друга, а окончательное акустическое изображение контролируемого объекта формируют как среднее значение полученной группы из N предварительных изображений.
Таким образом, предложенный способ формирования акустического изображения контролируемого объекта обеспечивает уменьшение искажений, вызванных разбросом значений скорости распространения акустической волны в материале объекта от образца к образцу.
Источники информации
1. В.Т.Пронякин, М.Ю.Васильев, Ю.Н.Панченко “ Ультразвуковой спосб контроля изделий и материалов”, страна публикации RU, №99115325, дата подачи заявки 1999.07.13, дата публикации 2001.05.20.
2. Г.И.Чапаев и др. “Способ определения размеров дефектов при ультразвуковом контроле изделий”, страна публикации RU, №2000104686, дата подачи заявки 2000.02.25, дата публикации 2001.12.27.
3. В.Й.Домаркис, Э.Л.Пилецкас “Ультразвуковая эхоскопия”, Ленинград: “Машиностроение”, 1988 г., с.17-18.
4. Й.Крауткремер, Г.Крауткремер “Ультразвуковой контроль материалов: справочное издание”, М.: “Металлургия”, 1991 г., 752 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИЗУАЛИЗАЦИИ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ ТРЕХМЕРНОГО ИЗДЕЛИЯ | 2013 |
|
RU2532597C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ КАЧЕСТВА МАТЕРИАЛА | 2003 |
|
RU2246724C1 |
| АКУСТООПТИЧЕСКИЙ СПОСОБ КОНТРОЛЯ КАЧЕСТВА ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2067760C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ СТАТИЧЕСКИХ ДЕФЕКТОВ | 2004 |
|
RU2272280C1 |
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ИНТРОСКОПИИ | 2008 |
|
RU2359265C1 |
| АКУСТОЭЛЕКТРОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1990 |
|
RU2016406C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВНУТРЕННИХ ЛОКАЛЬНЫХ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ В СТАЛЬНЫХ КОНСТРУКЦИЯХ | 2013 |
|
RU2541386C1 |
| Способ определения размеров зерна в листовом металлопрокате | 2022 |
|
RU2782966C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 1991 |
|
RU2029318C1 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2288484C2 |

Изобретение относится к области неразрушающих испытаний материалов и изделий ультразвуковыми методами и может быть использовано для определения формы дефектов и их пространственного положения, например, раковин, шлаковых включений и т.д., а также измерения толщины контролируемого объекта со сложной формой поверхности. В предлагаемом способе для уменьшения искажений акустического изображения контролируемого объекта, вызванных разбросом скорости распространения акустической волны в объекте от образца к образцу, при ультразвуковом контроле возбуждают ультразвуковые колебания в исследуемом объекте передающим пьезопреобразователем с широкой диаграммой направленности излучения. При приеме отраженных колебаний последовательно располагают приемный пьезопреобразователь в различных точках на поверхности контролируемого объекта, далее разбивают объект на локальные области, которые рассматривают в качестве локального сосредоточенного отражающего элемента, и отраженные сигналы, принятые в каждом из положений приемного пьезопреобразователя от каждой из локальных областей, сдвигают назад во времени на величину, равную времени распространения отраженной волны от рассматриваемой локальной области до соответствующего положения приемного пьезопреобразователя. Затем суммируют сдвинутые во времени сигналы соответственно для каждой из локальных областей. Указанные выше процедуры выполняют для двух или более частотных вариантов, в каждом из которых частоты акустических волн, используемые при ультразвуковом контроле, различны. Для каждого из частотных вариантов формируют М предварительных изображений в виде значений амплитуд суммарных сигналов, соответствующих различным локальным областям контролируемого объема и определенных для различных предполагаемых значений скорости распространения волны в материале М. Затем проводят попарное сравнение каждой из М пар предварительных изображений, определенных для каждого частотного варианта при одинаковых значениях скорости распространения, выбирают среди них пару изображений, наименее отличающихся друг от друга, и формируют окончательное акустическое изображение контролируемого объекта в виде их полусуммы. 1 з.п. ф-лы, 3 ил., 1 табл.
| Й.КРАУТКРЕМЕР, "УЛЬТРАЗВУКОВОЙ КОНТРОЛЬ МАТЕРИАЛОВ: СПРАВОЧНОЕ ИЗДАНИЕ", М., "МЕТАЛЛУРГИЯ", 1991 | |||
| А.Н.СЕРЬЕЗНОВ и др., "АКУСТИКО-ЭМИССИОННАЯ ДИАГНОСТИКА КОНСТРУКЦИЙ", М., "РАДИО И СВЯЗЬ", 2000 | |||
| СПОСОБ ИЗМЕРЕНИЯ РАЗМЕРОВ ДЕФЕКТОВ ПРИ УЛЬТРАЗВУКОВОМ КОНТРОЛЕ ИЗДЕЛИЙ | 2000 |
|
RU2191376C2 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ КОНТРОЛЯ ИЗДЕЛИЙ И МАТЕРИАЛОВ | 1999 |
|
RU2179313C2 |
| УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОП | 1999 |
|
RU2168723C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ АКУСТИЧЕСКОЙ ЭМИССИИ В ТРУБОПРОВОДАХ | 1990 |
|
RU2010227C1 |
| US 5936162 A, 10.08.1999 | |||
| DE 3236017 A1, 29.03.1984 | |||
| АКУСТИЧЕСКИЙ КОМПЬЮТЕРНЫЙ МАММОГРАФ С ТРЕХМЕРНОЙ ВИЗУАЛИЗАЦИЕЙ | 1998 |
|
RU2139679C1 |
| US 6330827 B1, 18.12.2001. | |||

