Изобретение относится к области гидроакустики и может быть использовано для навигации морских судов и для определения местоположения подводных аппаратов.
Известен способ построения навигационной карты морского дна на основе измерения глубин - батиметрическая навигация (“Гидроакустическая техника исследования и освоения океана”, под ред. В.В.Богородского, Л.: Гидрометеоиздат, 1984 г.). Здесь формируют узкую диаграмму направленности, излучают в сторону дна акустический импульсный сигнал, регистрируют время прихода отраженного от границы вода-дно акустического импульсного сигнала относительно излученного акустического импульсного сигнала. На основе полученного значения времени рассчитывают расстояние до дна в данной точке. Полученное значение сопоставляют с географическими координатами, которые определяют с помощью работающей с заданной погрешностью определения координат навигационной системы. Последовательно обходя заданный район, составляют его карту глубин.
Известен также способ составления карты морского дна по амплитуде отраженного от дна акустического импульсного сигнала (“Акустика дна океана”, под ред. У.Купермана, Ф.Енсена, М.: Мир, 1984, с.65-71). Здесь формируют узкую диаграмму направленности, в сторону морского дна излучают акустический импульсный сигнал, регистрируют амплитуду отраженного от границы раздела вода-дно акустического импульсного сигнала, измеренное значение амплитуды сопоставляют с географическими координатами, которые определяют с помощью работающей с заданной погрешностью определения координат навигационной системы.
Последовательно обходя заданный район, составляют карту амплитуд отраженного импульсного сигнала исследуемого района морского дна.
Недостатком обоих способов является невозможность составления карты морского дна в районах с гладким рельефом дна.
Последний способ как наиболее близкий к предлагаемому по технической сущности выбран в качестве прототипа.
Задачей, на решение которой направлено заявляемое техническое решение, является составление навигационной карты морского дна при гладком рельефе морского дна.
Технический результат, достигаемый при решении поставленной задачи, выражается в возможности использования свойств акустического сигнала проникать в морское дно на некоторую глубину и отражаться от границ раздела пород морского дна. Так как рисунок структуры слоев морского дна неизменный, то и отраженные сигналы неизменны для данной области морского дна.
Поставленная задача решается тем, что способ построения навигационной карты морского дна, включающий последовательный обход заданного района, во время которого производят излучение в сторону морского дна акустического импульсного сигнала для каждой точки составляемой навигационной карты морского дна, формирование узкой диаграммы направленности приемной антенны, прием и преобразование акустических импульсных сигналов, отраженных от границ раздела слоев морского дна, в электрические, усиление их и выделение огибающей этих сигналов, отличается тем, что огибающую электрических импульсных сигналов с выхода приемного тракта подают на аналого-цифровой преобразователь, который берет выборки огибающей с частотой дискретизации, равной двойной полосе пропускания приемного тракта с момента излучения акустического импульсного сигнала до момента времени, равного времени его прохождения на заданную глубину и обратно, значения выборок, взятые в этом интервале, делят на максимальное значение выборки в этом интервале, полученные значения ставят в соответствие географическим координатам данного участка морского дна и сохраняют в цифровой форме, как цифровую навигационную карту морского дна.
Сопоставительный анализ признаков заявляемого решения и прототипа свидетельствует о соответствии предлагаемого решения критерию “новизна”.
Отличительные признаки предлагаемого решения выполняют следующие функциональные задачи.
Признаки: “...огибающую электрических импульсных сигналов с выхода приемного тракта подают на аналого-цифровой преобразователь, который берет выборки огибающей с частотой дискретизации, равной двойной полосе пропускания приемного тракта с момента излучения акустического импульсного сигнала до момента времени, равного времени его прохождения на заданную глубину и обратно...” - позволяют преобразовать принимаемый аналоговый сигнал в цифровой код, что дает возможность обрабатывать его с помощью компьютера.
Признак: “...значения выборок, взятые в этом интервале, делят на максимальное значение выборки в этом интервале...” - обеспечивает независимость значений выборок от мощности излучаемого акустического сигнала.
Признак: “...полученные значения ставят в соответствие географическим координатам данного участка морского дна и сохраняют в цифровой форме, как цифровую навигационную карту морского дна...” - обеспечивает преобразование полученных данных в форму, пригодную для дальнейшего использования и привязку к географическим координатам. При этом совокупность отличительных признаков предлагаемого решения обеспечивает возможность составления навигационной карты морского дна при гладком рельефе морского дна, используя свойства акустического сигнала проникать в морское дно на некоторую глубину и отражаться от границ раздела пород морского дна.
Предложенный путь решения поставленной задачи не известен из уровня техники, т.е. решение удовлетворяет критерию “изобретательский уровень”.
Сущность технического решения поясняется чертежами.
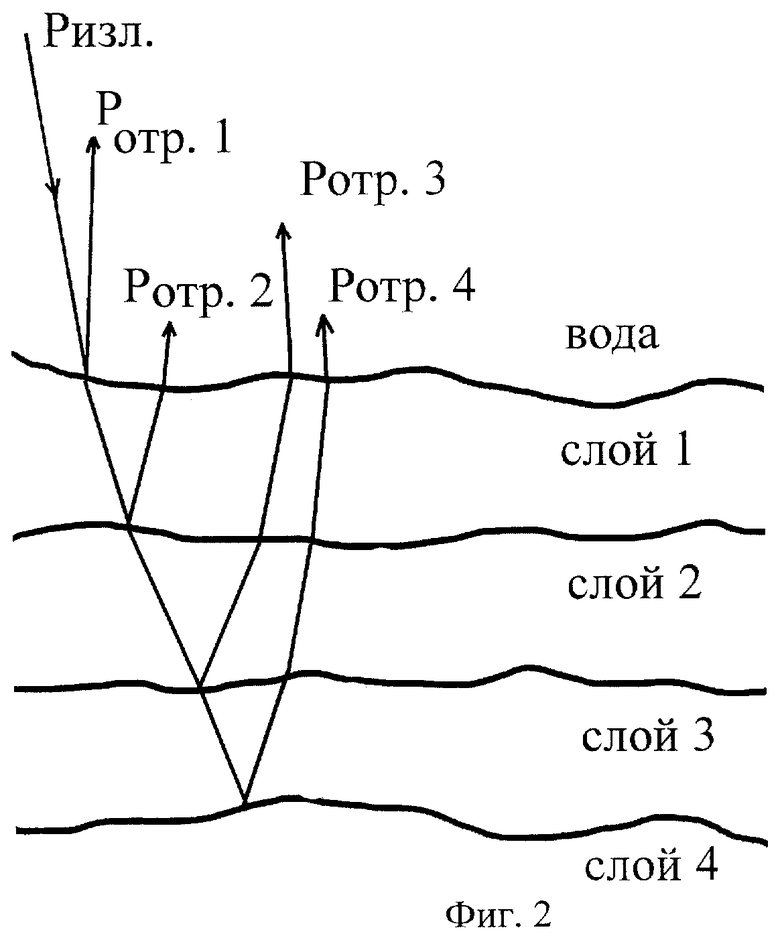
На фиг.1 представлена структурная схема устройства для осуществления картографирования.
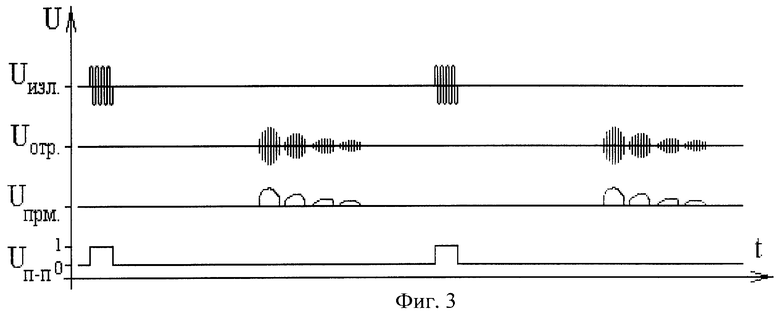
На фиг.2 представлены отражения акустического импульсного сигнала от границ раздела слоев пород морского дна.
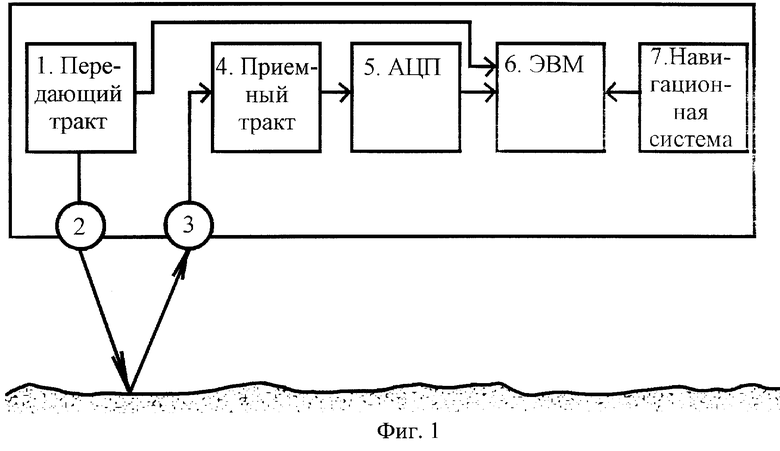
На фиг.3 представлены осциллограммы напряжений в точках схемы устройства.
На чертежах обозначено: 1 - передающий тракт; 2 - излучающая антенна; 3 - приемная антенна; 4 - приемный тракт; 5 - аналого-цифровой преобразователь (АЦП); 6 - компьютер (ЭВМ); 7 - навигационная система; Ризл. - излученный акустический импульсный сигнал; Ротр.1 - акустический сигнал, отразившийся от границы вода-грунт; Ротр.2 - акустический сигнал, отразившийся от границы раздела 1 и 2 слоев грунта; Ротр.3 - акустический сигнал, отразившийся от границы раздела 2 и 3 слоев грунта; Ротр.4 - акустический сигнал, отразившийся от границы раздела 3 и 4 слоев грунта; Uизл. - сигнал на выходе передающего тракта; Uотр. - сигнал на входе приемного тракта; Uпрм. - сигнал на выходе приемного тракта; Uп-п - сигнал “прием-передача”.
Способ осуществляют следующим образом. На судне обходят заданный район. Во время обхода, используя устройство для картографирования (фиг.1) для каждой заданной точки составляемой навигационной карты, с помощью передающего тракта 1 формируют прямоугольный импульс Uизл. с заполнением синусоидальным сигналом несущей частоты (фиг.3). Период следования, длительность, частоту заполнения и мощность прямоугольного импульса Uизл. выбирают оптимальными для данного района картографирования. Uизл. подают на излучающую антенну 2, которая преобразует электрический сигнал Uизл. в акустический Ризл. (фиг.2) и излучает его в сторону дна. С помощью приемной антенны 3, имеющей узкую диаграмму направленности, принимают отраженные от границ раздела слоев пород морского дна акустические сигналы Ротр.1, Ротр.2, Ротр.3, Ротр.4 (фиг.2), преобразуют акустический сигнал в электрический Uотр. (фиг.3). В приемном тракте 4 их усиливают, выделяют огибающую приемного сигнала Uпрм. (фиг.3), которую подают на вход аналого-цифрового преобразователя 5. Последний преобразует аналоговый сигнал с выхода приемного тракта 4 в цифровой код. Аналого-цифровой преобразователь 5 имеет частоту дискретизации f=2·Δf, где Δf - полоса пропускания приемного тракта 4. Код с выхода аналого-цифрового преобразователя подают на компьютер 6, производящий программную обработку оцифрованных значений. Кроме того, передающий тракт 1 формирует сигнал Uп-п (фиг.3), принимающий значение логической 1 в момент излучения импульса Uизл., и значение логического 0 в остальное время. Сигнал Uп-п подается на компьютер 6. Значения текущих координат судна i, j с навигационной системы 7, определяющей местоположение судна, также подают на компьютер 6. По перепаду сигнала Uп-п из логической 1 в логический 0 берут выборки  сигнала Uпрм., где i, j - текущие координаты судна, k - порядковый номер выборки. Выборки сохраняют в буферной памяти компьютера 6, одновременно сравнивают их с пороговым значением, равным значению Uпрм. в отсутствие принимаемого сигнала. При превышении значения Uпрм. порогового значения делают вывод, что на входе присутствует отраженный от дна сигнал и с этого момента отсчитывают интервал времени Т, равный времени прохождения излученного сигнала на заданную глубину и обратно: Т=2·L/Сср.ф., где L - заданная глубина, Сср.ф. - усредненная скорость распространения волн в слоистой среде. По окончании интервала Т выборки перестают сохранять в буферной памяти до следующего перепада сигнала Uп-п из логической 1 в логический 0. Из набора сохраненных в буферной памяти значений выборок определяют наибольшее значение. Оно будет соответствовать отражению от границы вода-грунт Uпрм.1. Это значение присваивают переменной Вij. Значения выборок
сигнала Uпрм., где i, j - текущие координаты судна, k - порядковый номер выборки. Выборки сохраняют в буферной памяти компьютера 6, одновременно сравнивают их с пороговым значением, равным значению Uпрм. в отсутствие принимаемого сигнала. При превышении значения Uпрм. порогового значения делают вывод, что на входе присутствует отраженный от дна сигнал и с этого момента отсчитывают интервал времени Т, равный времени прохождения излученного сигнала на заданную глубину и обратно: Т=2·L/Сср.ф., где L - заданная глубина, Сср.ф. - усредненная скорость распространения волн в слоистой среде. По окончании интервала Т выборки перестают сохранять в буферной памяти до следующего перепада сигнала Uп-п из логической 1 в логический 0. Из набора сохраненных в буферной памяти значений выборок определяют наибольшее значение. Оно будет соответствовать отражению от границы вода-грунт Uпрм.1. Это значение присваивают переменной Вij. Значения выборок  делят на величину Вij, соответствующую отражению от границы раздела вода-грунт:
делят на величину Вij, соответствующую отражению от границы раздела вода-грунт:  . Полученные цифровые значения
. Полученные цифровые значения  ставят в соответствие географическим координатам данного участка морского дна. Последовательно обходя заданный район, составляют его цифровую карту, где каждой точке морского дна с географическими координатами i, j, соответствует набор чисел
ставят в соответствие географическим координатам данного участка морского дна. Последовательно обходя заданный район, составляют его цифровую карту, где каждой точке морского дна с географическими координатами i, j, соответствует набор чисел  где n=T·f. Полученные значения
где n=T·f. Полученные значения  вместе с соответствующими им географическими координатами сохраняют на каком-либо носителе компьютера 6 (например, на жестком диске). Последовательным обходом заданного района составляют его цифровую навигационную карту морского дна.
вместе с соответствующими им географическими координатами сохраняют на каком-либо носителе компьютера 6 (например, на жестком диске). Последовательным обходом заданного района составляют его цифровую навигационную карту морского дна.
Такое решение позволяет получить навигационную карту морского дна при гладком рельефе, используя структуру слоев морского дна.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИИ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2011 |
|
RU2466426C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| УСТРОЙСТВО ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2439520C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| Способ гидроакустического поиска автономного донного подводного объекта | 2019 |
|
RU2727331C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2010 |
|
RU2456644C2 |
Изобретение относится к области гидроакустики и может быть использовано для навигации морских судов и для определения местоположения подводных аппаратов. Технический результат заключается в возможности составления карты морского дна в районах с гладким рельефом дна при использовании свойств акустического сигнала. Способ включает в себя обход заданного района, во время которого производят излучение в сторону морского дна акустического импульсного сигнала для каждой точки составляемой навигационной карты морского дна, формирование узкой диаграммы направленности приемной антенны, прием и преобразование акустических импульсных сигналов, отраженных от границ раздела слоев морского дна, в электрические, усиление их и выделение огибающей этих сигналов, причем огибающую электрических импульсных сигналов с выхода приемного тракта подают на аналого-цифровой преобразователь, который берет выборки огибающей с частотой дискретизации, равной двойной полосе пропускания приемного тракта с момента излучения акустического импульсного сигнала до момента времени, равного времени его прохождения на заданную глубину и обратно, значения выборок, взятые в этом интервале, делят на максимальное значение выборки в этом интервале, полученные значения ставят в соответствие географическим координатам данного участка морского дна и сохраняют в цифровой форме, как цифровую навигационную карту морского дна. 3 ил.
Способ построения навигационной карты морского дна, включающий обход заданного района, во время которого производят излучение в сторону морского дна акустического импульсного сигнала для каждой точки составляемой навигационной карты морского дна, формирование узкой диаграммы направленности приемной антенны, прием и преобразование акустических импульсных сигналов, отраженных от границ раздела слоев морского дна, в электрические, усиление их и выделение огибающей этих сигналов, отличающийся тем, что огибающую электрических импульсных сигналов с выхода приемного тракта подают на аналого-цифровой преобразователь, который берет выборки огибающей с частотой дискретизации, равной двойной полосе пропускания приемного тракта с момента излучения акустического импульсного сигнала до момента времени, равного времени его прохождения на заданную глубину и обратно, значения выборок, взятые в этом интервале, делят на максимальное значение выборки в этом интервале, полученные значения ставят в соответствие географическим координатам данного участка морского дна и сохраняют в цифровой форме, как цифровую навигационную карту морского дна.
| Акустика дна океана | |||
| Под ред | |||
| У.КУПЕРМАНА, Ф.ЕНСЕНА, Москва, Мир, 1984, с.65-71 | |||
| ПРОСТАКОВ А.Г., Электронный ключ к океану, Ленинград, Судостроение, 1986, с.64-67 | |||
| RU 1128794 A1, 10.03.1996 | |||
| US 5699318 А, 16.12.1997 | |||
| US 6160756 А, 12.12.2000 | |||
| US 5805528 A, 08.09.1998. |

