Область техники, к которой относится изобретение
Настоящее изобретение относится к конструкции ноги робота, передвигающегося на ногах, и, в частности, к конструкции ноги робота, передвигающегося на ногах, в котором нижняя часть ноги соединена с нижним концом верхней части ноги с помощью коленного сустава, ступня соединена с нижним концом нижней части ноги через голеностопный сустав, и ступня установлена на голеностопном суставе так, что может наклоняться и поворачиваться по отношению к нижней части ноги.
Уровень техники
Подобная конструкции ноги робота, передвигающегося на ногах, известна из выложенной заявки на японский патент №3-184782. В этой компоновке двигатель наклона установлен вблизи к верхнему концу нижней части ноги и позволяет осуществлять наклон ступни по отношению к нижней части ноги вокруг оси наклона через средство ременной передачи, и двигатель поворота установлен на оси поворота, перпендикулярной к оси наклона, и позволяет поворачивать ступню по отношению к нижней части ноги.
Следует отметить, что когда осуществляется привод в движение нижней части ноги по отношению к верхней части ноги, снижение момента инерции части, расположенной ниже коленного сустава, который соединяет верхнюю часть ноги с нижней частью ноги, позволяет снизить нагрузку на источник привода при передвижении нижней части ноги. Для снижения момента инерции, желательно, чтобы тяжелые объекты, закрепленные на нижней части ноги, были расположены как можно ближе к коленному суставу, но в вышеуказанной компоновке, хотя двигатель наклона, который представляет собой тяжелый объект, расположен в верхнем положении нижней части ноги, то есть близко к коленному суставу, в связи с тем, что двигатель поворота, который представляет собой другой тяжелый объект, расположен в нижнем положении нижней части ноги, то есть на удалении от коленного сустава, невозможно обеспечить достаточно малый момент инерции при передвижении части, расположенной ниже коленного сустава, что представляет собой проблему.
Кроме того, в ступне установлен датчик усилия по шести осям, предназначенный для управления ходьбой робота на двух ногах, и если двигатель поворота расположен в нижнем положении нижней части ноги, близко к ступне, необходимо предпринимать специальные меры для снижения воздействия шума двигателя поворота, что также представляет собой проблему.
Кроме того, поскольку двигатель поворота расположен вблизи к голеностопному суставу, положение голеностопного сустава приподнято от поверхности пола, при этом требуется прикладывать значительное усилие для управления правильным положением голеностопного сустава, и поэтому трудно обеспечить необходимую скорость реакции на неожиданно возникающие неровности и наклоны поверхности пола, что также представляет собой проблему.
Сущность изобретения
Настоящее изобретение разработано для решения указанных проблем и направлено на уменьшение силы привода нижней части ноги путем снижения момента инерции при вращении вокруг коленного сустава с одновременной минимизацией влияния шума двигателя на датчик, установленный в ступне, и, кроме того, направлено на обеспечение быстроты реакции на неожиданно возникающие неровности и наклоны поверхности пола благодаря уменьшению высоты расположения голеностопного сустава от поверхности пола.
Для достижения этих целей, в соответствии с первым аспектом настоящего изобретения предложена конструкция робота, передвигающегося на ногах, в которой нижняя часть ноги соединена с нижним концом верхней части ноги с помощью коленного сустава, ступня соединена с нижним концом нижней части ноги через голеностопный сустав, и ступня установлена на голеностопном суставе так, что она может осуществлять наклон вокруг поперечной оси и поворот вокруг продольной оси по отношению к нижней части ноги, причем конструкция ноги робота, передвигающегося на ногах, содержит двигатель наклона, предназначенный для осуществления наклона ступни вокруг поперечной оси, причем двигатель наклона установлен на нижней части ноги над голеностопным суставом, и двигатель поворота, предназначенный для осуществления поворота ступни вокруг продольной оси, причем двигатель поворота установлен на нижней части ноги над голеностопным суставом.
В соответствии с такой компоновкой, поскольку двигатель наклона, предназначенный для осуществления наклона ступни вокруг поперечной оси, и двигатель поворота, предназначенный для поворота ступни вокруг продольной оси, установлены на нижней части ноги над голеностопным суставом, двигатель наклона и двигатель поворота, которые представляют собой тяжелые объекты, расположены близко к коленному суставу, и в результате, момент инерции нижней части ноги вокруг коленного сустава может быть уменьшен, что таким образом уменьшает нагрузку на источник привода коленного сустава.
Кроме того, в соответствии со вторым аспектом настоящего изобретения, в дополнение к компоновке по первому аспекту предложена конструкция ноги робота, передвигающегося на ногах, которая включает вал наклона, установленный на нижней части ноги так, что он может вращаться вокруг поперечной оси, средство ременной передачи наклона, предназначенное для передачи вращения выходного вала двигателя наклона на вал наклона, причем выходной вал установлен в направлении поперечной оси, и механизм поворота, предназначенный для установки с возможностью поворота ступни на валу наклона.
В соответствии с такой компоновкой, поскольку ступня установлена с возможностью поворота с помощью механизма поворота на валу наклона, который установлен на нижней части ноги так, что он может вращаться вокруг поперечной оси, и привод вала наклона осуществляется через ременное средство передачи наклона, которое предназначено для передачи вращения выходного вала двигателя наклона на вал наклона, при вращении вала наклона происходит наклон механизма поворота и ступни в виде единого блока, и механизм поворота при работе позволяет поворачивать ступню по отношению к валу наклона, что таким образом предотвращает взаимное влияние наклона и поворота ступни друг на друга.
Кроме того, в соответствии с третьим аспектом настоящего изобретения, предложена структура ноги робота, передвигающегося на ногах, в которой нижняя часть ноги соединена с нижним концом верхней части ноги через коленный сустав, ступня соединена с нижним концом нижней части ноги через голеностопный сустав, и ступня установлена на голеностопном суставе так, что она может осуществлять наклон вокруг поперечной оси и поворот вокруг продольной оси по отношению к нижней части ноги, причем структура ноги робота, передвигающегося на ногах, содержит вал наклона и вал поворота, которые установлены перпендикулярно друг к другу и могут вращаться вокруг поперечной оси и продольной оси соответственно, вращающийся элемент, который установлен с возможностью вращения на внешней окружности одного из вала наклона и вала вращения и который вращается совместно со ступней, первый источник привода, который вращает другой один из вала наклона и вала поворота, ведущую коническую шестерню, установленную коаксиально внутри указанного другого одного из вала наклона и вала поворота, ведомую коническую шестерню, установленную коаксиально внутри указанного вала наклона и вала поворота, причем ведомая коническая шестерня зацеплена зубьями с ведущей конической шестерней и соединена с вращающимся элементом, и второй источник привода, предназначенный для вращения ведущей конической шестерни.
В соответствии с такой компоновкой, поскольку вращающийся элемент, расположенный на ступне, установлен с возможностью вращения по отношению к внешней окружности одного из вала наклона и вала поворота, которые установлены перпендикулярно друг другу, ведущая коническая шестерня, установленная коаксиально с другим одним из вала наклона и вала поворота, соединена зубьями с ведомой конической шестерней, установленной коаксиально с указанным одним из вала наклона и вала поворота и соединена с вращающимся элементом, причем указанный один из вала наклона и вала поворота вращается с помощью первого источника привода, и ведущая коническая шестерня вращается с помощью второго источника привода, причем наклон и поворот ступни осуществляются независимо так, что эти движения не мешают друг другу. Кроме того, поскольку вал наклона и вал поворота могут быть расположены низко, управление правильным положением голеностопного сустава может быть обеспечено с меньшим управляющим усилием, что таким образом обеспечивает стабильную ходьбу благодаря быстрой реакции на неожиданно возникающие неровности и наклоны поверхности пола.
Кроме того, в соответствии с четвертым аспектом настоящего изобретения, предложена конструкция ноги робота, передвигающегося на ногах, в которой нижняя часть ноги соединена с нижним концом верхней части ноги через коленный сустав, ступня соединена с нижним концом нижней части ноги через голеностопный сустав, и на голеностопном суставе установлена ступня так, что может осуществляться наклон ступни вокруг поперечной оси и поворот ее вокруг продольной оси по отношению к нижней части ноги, причем конструкция ноги робота, передвигающегося на ногах, содержит механизм поворота, предназначенный для установки ступни с возможностью поворота на валу наклона, причем механизм поворота содержит вал поворота, установленный на валу наклона перпендикулярно к нему, элемент поворота, закрепленный на ступне и установленный с возможностью вращения на внешней окружности вала поворота, ведущую коническую шестерню, установленную коаксиально внутри вала наклона, средство ременной передачи поворота, предназначенное для передачи вращения выходного вала двигателя поворота на ведущую коническую шестерню, причем выходной вал расположен в направлении поперечной оси, и ведомую коническую шестерню, установленную коаксиально внутри вала поворота, причем ведомая коническая шестерня соединена зубьями с ведущей конической шестерней и соединена с элементом поворота.
В соответствии с такой компоновкой, поскольку элемент поворота, закрепленный на ступне, установлен с возможностью вращения на внешней окружности вала поворота, который установлен перпендикулярно по отношению к валу наклона, и вращение выходного вала двигателя поворота передается на элемент поворота через ременное средство передачи поворота, ведущая коническая шестерня установлена коаксиально с валом наклона, и ведомая коническая шестерня установлена коаксиально с валом вращения, ступня может поворачиваться независимо, не влияя на наклон ступни, и может свободно наклоняться при повороте ступни. Кроме того, поскольку вал наклона и вал поворота могут быть установлены более низко, управление правильным положением голеностопного сустава может быть обеспечено при меньшем управляющем усилии, что позволяет обеспечить стабильную ходьбу благодаря быстрой реакции на неожиданно возникающие неровности и наклоны поверхности пола.
Кроме того, в соответствии с пятым аспектом настоящего изобретения, в дополнение к компоновке по четвертому аспекту предложена конструкция ноги робота, передвигающегося на ногах, в которой понижающая передача наклона установлена между средством ременной передачи наклона и валом наклона, и понижающая передача поворота расположена между ведомой конической шестерней и элементом поворота.
В соответствии с этой компоновкой, поскольку понижающая передача наклона расположена между средством ременной передачи наклона и валом наклона, может быть уменьшена нагрузка, прикладываемая к двигателю наклона, и поскольку понижающая передача поворота расположена между ведомой конической шестерней и элементом поворота, может быть уменьшена нагрузка, прикладываемая к двигателю поворота.
Кроме того, в соответствии с шестым аспектом настоящего изобретения, в дополнение к компоновке по четвертому или пятому аспектам, предложена конструкция ноги робота, передвигающегося на ногах, в которой элемент поворота снаружи закрыт частично сферическим кожухом, и между частично сферическим кожухом и нижним концом формирующего скелет нижнего соединения нижней части ноги сформирован заранее определенный зазор.
В соответствии с данной компоновкой, поскольку между частично сферическим кожухом, закрывающим снаружи элемент поворота, и нижним концом нижнего соединения ноги сформирован заранее определенный зазор, отпадает необходимость использования большого зазора между частично сферическим кожухом и нижним соединением ноги, даже когда осуществляется наклон и поворот ступни, что эффективно предотвращает попадание посторонних объектов внутрь механизма.
Кроме того, в соответствии с седьмым аспектом настоящего изобретения, в дополнение к компоновке по шестому аспекту предложена конструкция ноги робота, передвигающегося на ногах, в которой центр частично сферического кожуха расположен на валу наклона или на валу поворота.
В соответствии с такой компоновкой, поскольку центр частично сферического кожуха расположен на валу наклона или на валу поворота, при наклоне или повороте ступни поддерживается постоянный зазор, сформированный между частично сферическим кожухом и нижним соединением ноги, и частично сферический кожух не мешает нижнему соединению ноги, увеличивая таким образом диапазон движения голеностопного сустава, и, кроме того, при этом эффективно предотвращается попадание посторонних объектов внутрь механизма.
Кроме того, в соответствии с восьмым аспектом настоящего изобретения, в дополнение к компоновке по одному из аспектов с первого по седьмой предложена конструкция ноги робота, передвигающегося на ногах, в которой в ступне установлен датчик, предназначенный для определения нагрузки, прикладываемой к ступне.
В соответствии с такой компоновкой, поскольку двигатель наклона и двигатель поворота расположены далеко от ступни, шумы двигателей в меньшей степени влияют на датчик, установленный в ступне, что позволяет улучшить точность работы датчика.
Двигатель 34 наклона и двигатель 35 поворота в одном из вариантов выполнения представляют собой соответственно первый источник привода и второй источник привода в соответствии с настоящим изобретением; элемент 46 поворота в варианте выполнения представляет собой вращающийся элемент в соответствии с настоящим изобретением; и внутренний частично сферический кожух 62, а также внешний частично сферический кожух 63 варианта выполнения представляют собой частично сферический кожух в соответствии с настоящим изобретением; и датчик 60 усилия по шести осям в варианте выполнения представляет собой датчик в соответствии с настоящим изобретением.
Перечень фигур чертежей
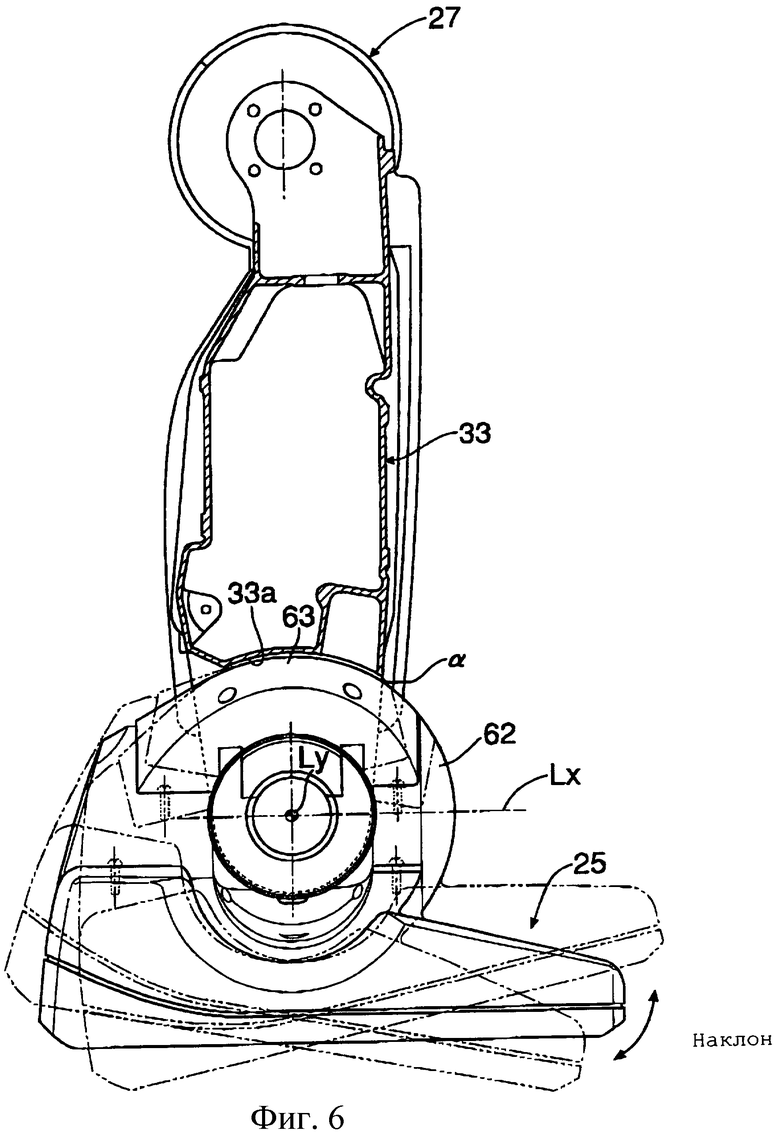
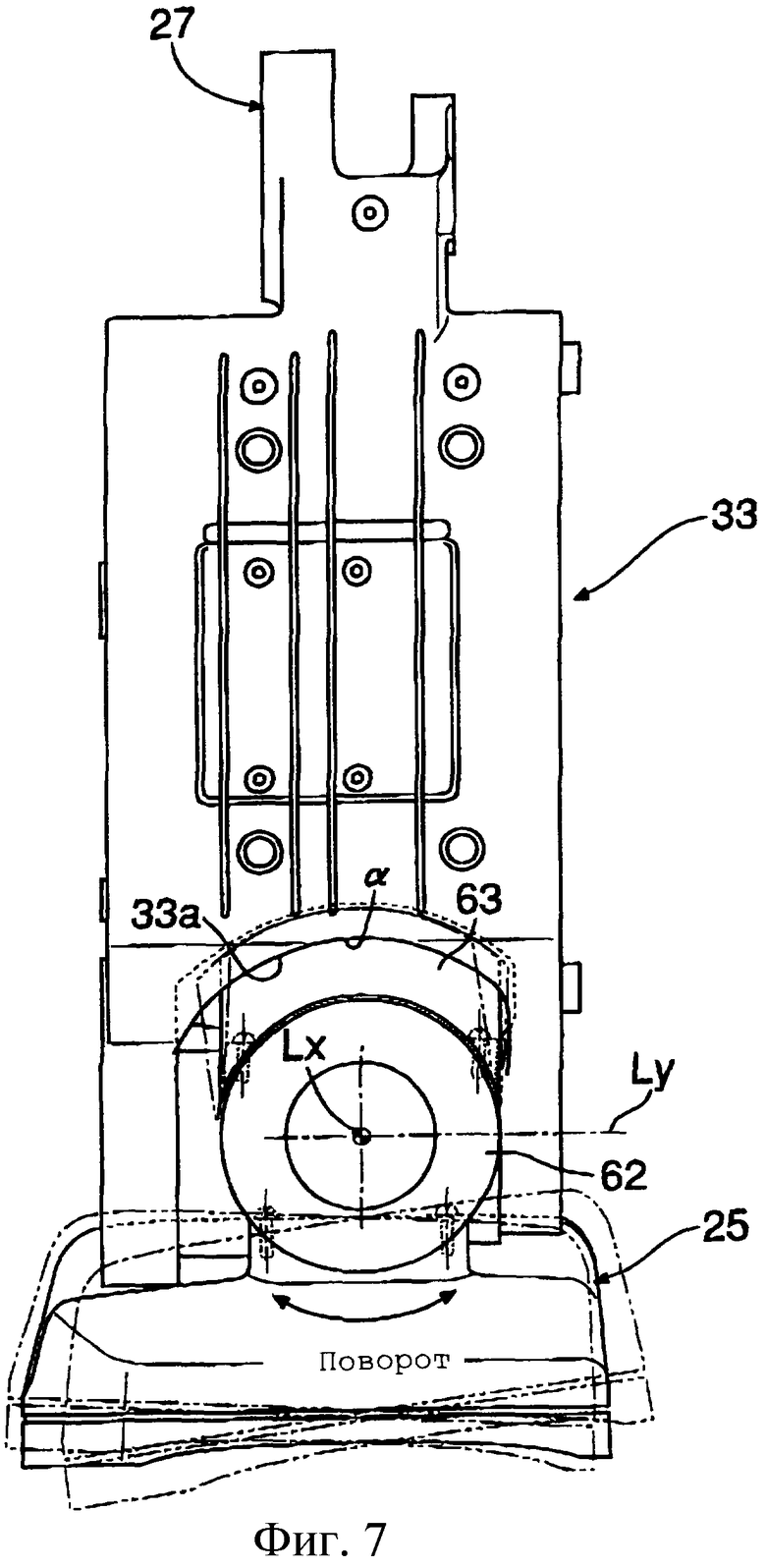
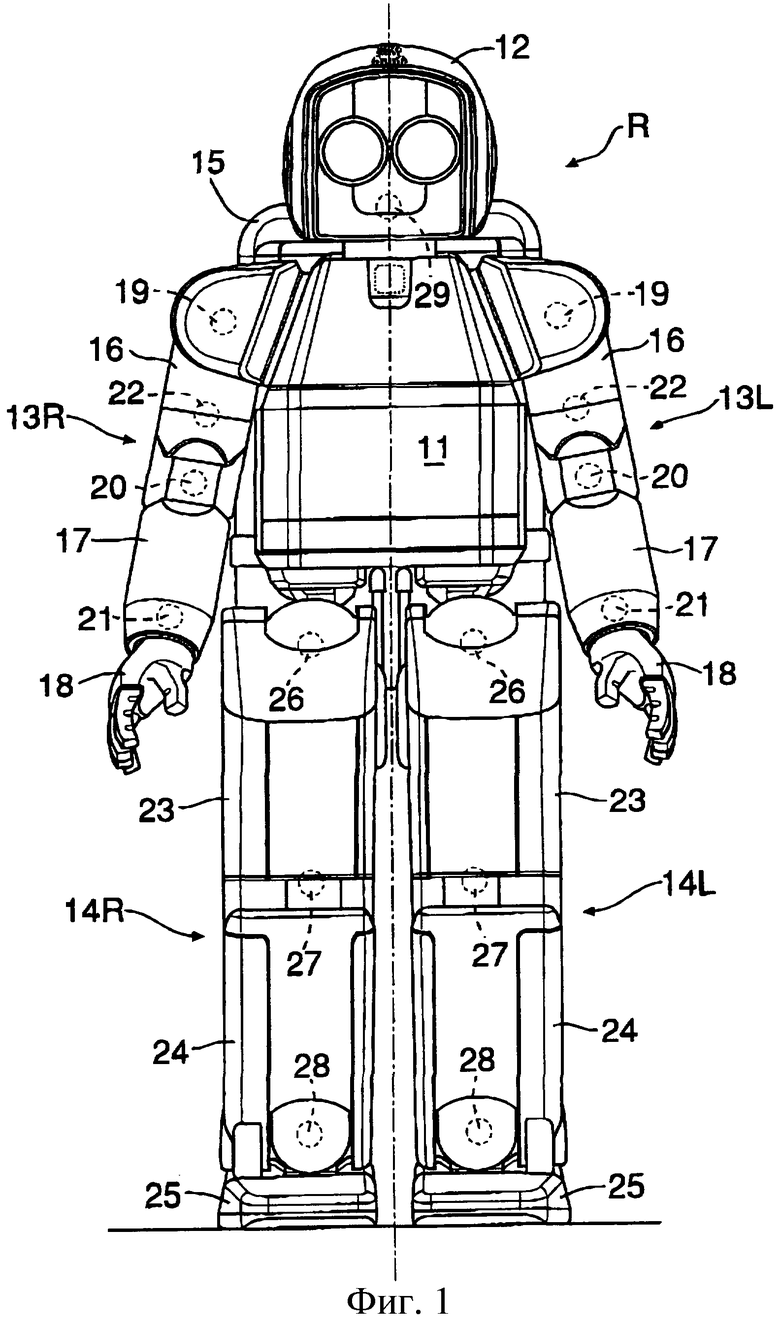
На фиг.1-7 показан один из вариантов воплощения настоящего изобретения; на фиг.1 представлен вид спереди робота, передвигающегося на ногах; на фиг.2 показан вид с правой стороны робота, передвигающегося на ногах; на фиг.3 показан вид в разрезе с увеличением по линии 3-3, обозначенной на фиг.2 (разрез по линии 3-3 на фиг.4); на фиг.4 показан вид в разрезе по линии 4-4, обозначенной на фиг.3; на фиг.5 показан вид в перспективе нижней части ноги и ступни; на фиг.6 показана схема, поясняющая действие наклона ступни; и на фиг.7 показана схема, поясняющая действие поворота ступни.
Сведения, подтверждающие возможность осуществления изобретения
Ниже описан вариант воплощения настоящего изобретения со ссылкой на прилагаемые фигуры чертежей.
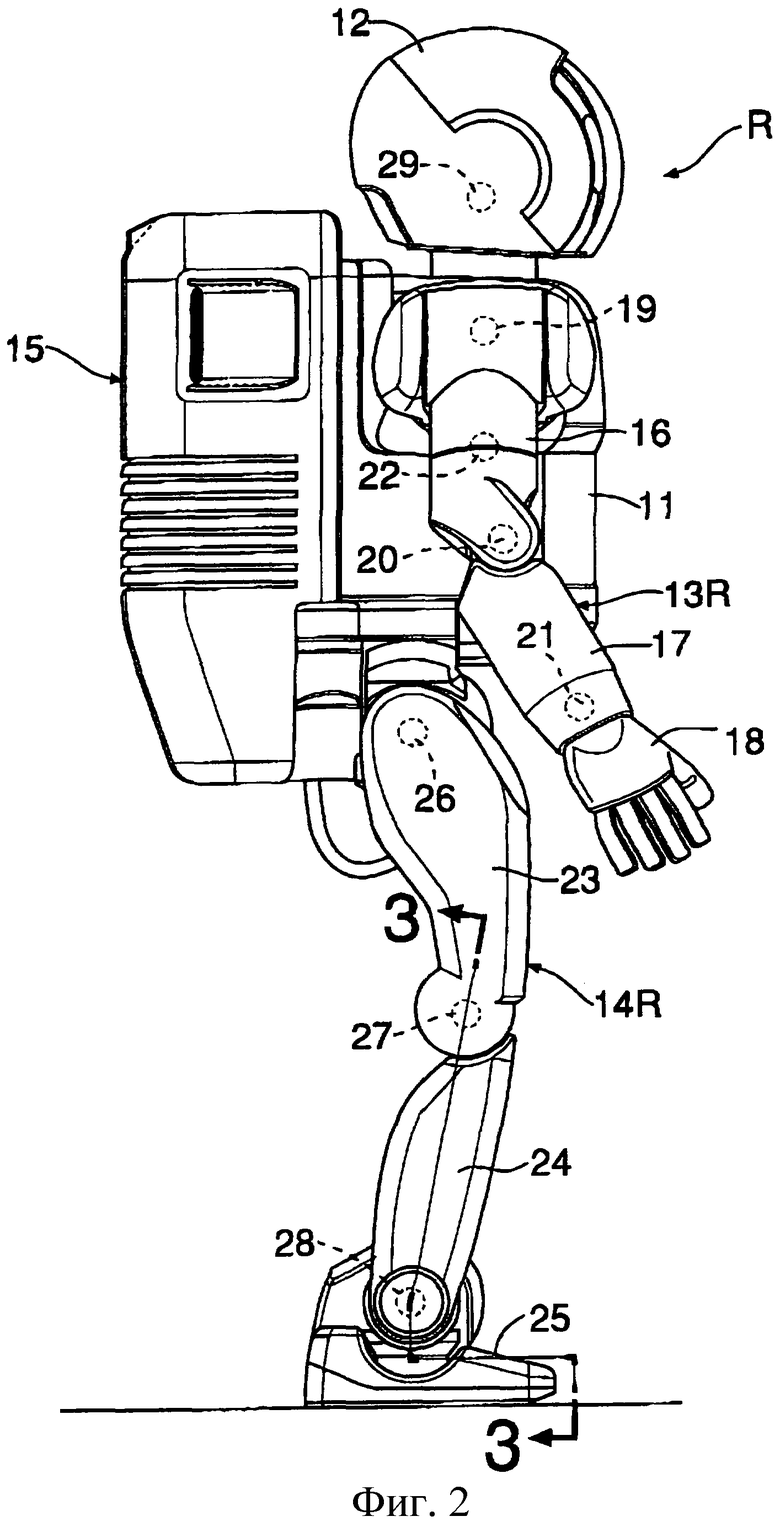
Как показано на фиг.1 и 2, автономный робот R, ходящий на двух ногах, содержит корпус 11, голову 12, левую руку 13L, правую руку 13R, левую ногу 14L и правую ногу 14R, и на спине корпуса 11 установлена коробка 15 электрического оборудования, в которой размещено электрическое оборудование. Каждая из левой руки 13L и правой руки 13R сформирована из верхней части 16 руки, нижней части 17 руки и части 18 ладони; корпус 11 и верхняя часть 16 руки соединены с помощью плечевого сустава 19; верхняя часть 16 руки и нижняя часть 17 руки соединены с помощью локтевого сустава 20; нижняя часть 17 руки и часть 18 ладони соединены с помощью сустава 21 запястья; и верхний сустав 22 руки, кроме того, дополнительно содержит продольную среднюю секцию верхней части 16 руки, предназначенную для поворота нижней половины верхней части 16 руки по отношению к ее верхней половине. Кроме того, каждая из левой ноги 14L и правой ноги 14R сформирована из верхней части 23 ноги, нижней части 24 ноги и ступни 25; корпус 11 и верхняя часть 23 ноги соединены с помощью тазобедренного сустава 26; верхняя часть 23 ноги и нижняя часть 24 ноги соединены с помощью коленного сустава 27; и нижняя часть 24 ноги и ступни 25 соединены через голеностопный сустав 28. Кроме того, корпус 11 и голова 12 соединены через шейный соединитель 29. Положения вышеуказанных суставов представлены на чертеже кружками, обозначенными пунктирной линией.
Конструкция правой ноги 14R робота R поясняется ниже со ссылкой на фиг.3 - 5. Поскольку левая нога 14L имеет зеркально симметричную конструкцию правой ноги 14R, повторное ее описание не приведено.
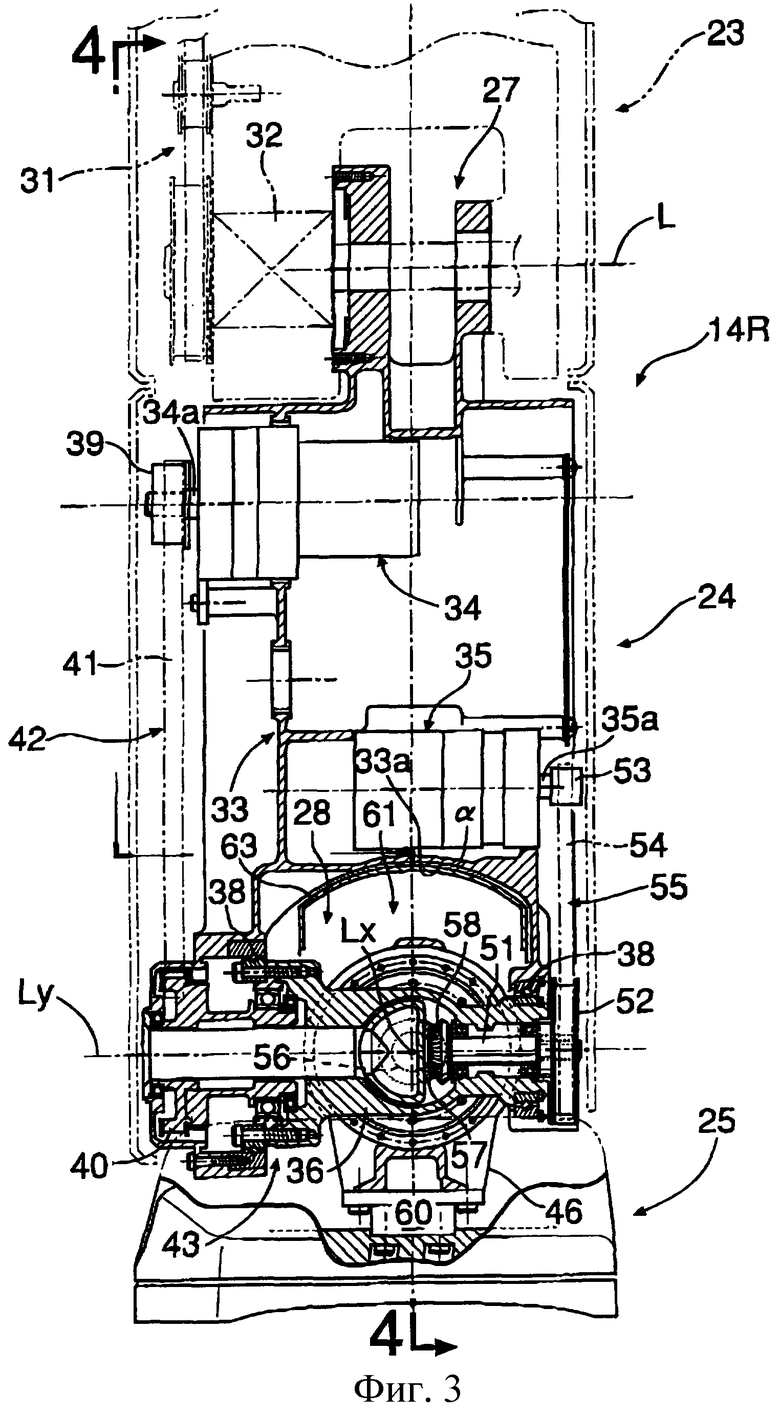
Верхняя часть 23 ноги и нижняя часть 24 ноги соединены через коленный сустав 27, ось L которого приводится во вращение с помощью источника привода (не показан) через средство 31 ременной передачи и редуктор 32. Нижняя часть 24 ноги содержит формирующее скелет нижнее соединение 33 ноги, двигатель 34 наклона установлен у верхнего конца нижнего соединения 33 ноги так, что выходной вал 34а двигателя 34 наклона расположен в направлении поперечной оси Ly, и двигатель 35 поворота установлен в середине нижнего соединения 33 ноги так, что выходной вал 35а двигателя 35 поворота расположен в направлении поперечной оси Ly.
Вал 36 наклона установлен с возможностью вращения на нижнем конце нижнего соединения 33 ноги с использованием пары подшипников 38 на поперечных роликах и расположен вдоль поперечной оси Ly (см. фиг.3). Ведущий шкив 39, установленный на выходном валу 34а двигателя 34 наклона, и ведомый шкив 40, расположенный на поперечной оси Ly, соединены бесконечным ремнем 41. Ведущий шкив 39, ведомый шкив 40 и бесконечный ремень 41 формируют средство 42 ременной передачи наклона. Ведомый шкив 40 и вал 36 наклона соединены через понижающую передачу 43 наклона, которая построена по известной схеме гармонического редуктора (название продукта). Гармонический редуктор понижает скорость вращения входного элемента и выводит ее на коаксиально установленный выходной элемент и может быть заменен замедляющей передачей - типа планетарной передачи.
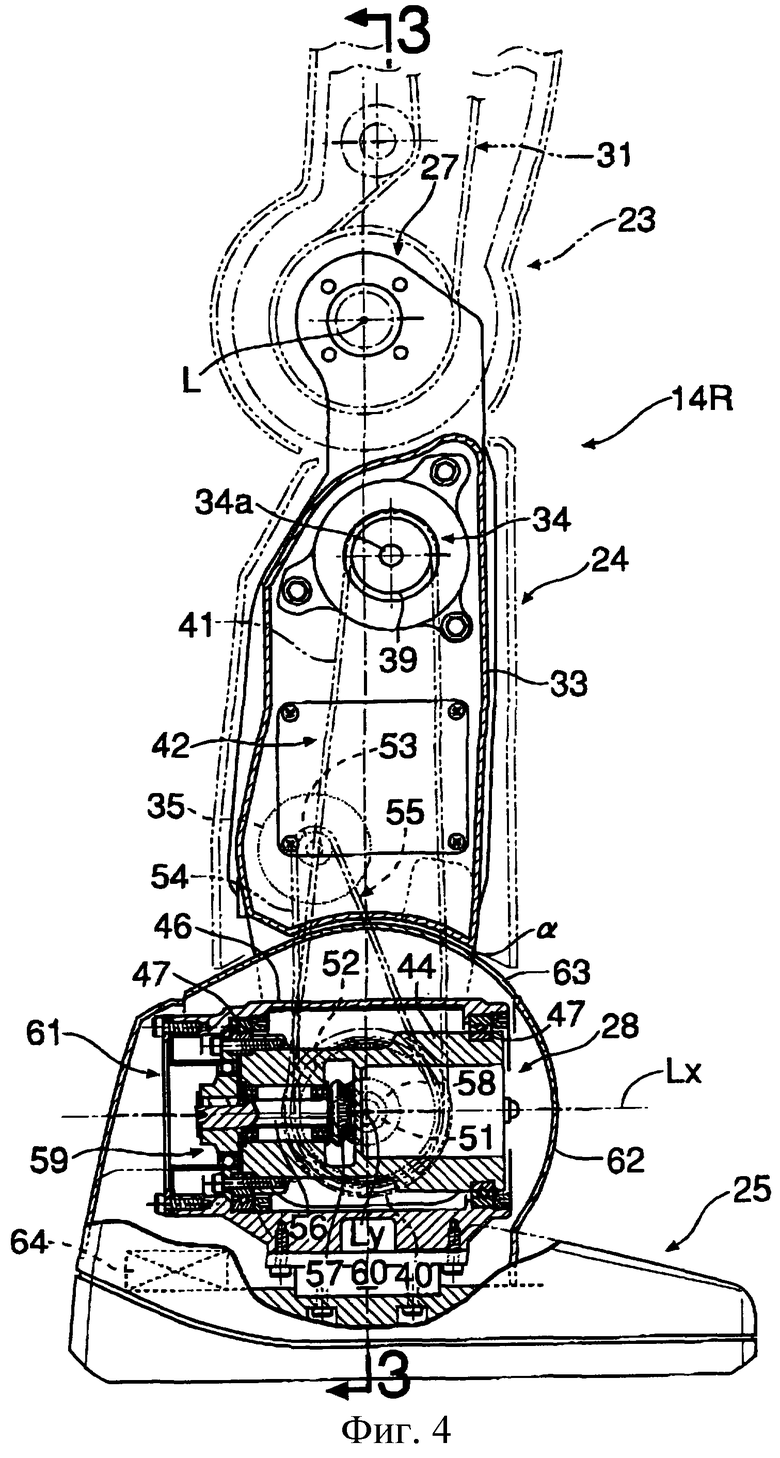
На валу 36 наклона установлен вал 44 наклона, который проходит в направлении (продольной оси Lx), перпендикулярном валу 36 наклона (см. фиг.4). Трубчатый элемент 46 поворота установлен на внешней окружности вала 44 поворота с помощью пары подшипников 47 с поперечными роликами, и ступня 25 закреплена на этом элементе 46 поворота.
Ведомый шкив 52 закреплен на одном конце ведущего вала 51 конической шестерни, который установлен с возможностью вращения по отношению к валу 36 наклона. Ведущий шкив 53 закреплен на выходном валу 35а двигателя 35 поворота и соединен с ведомым шкивом 52 через бесконечный ремень 54. Ведущий шкив 53, ведомый шкив 52, а также бесконечный ремень 54 формируют средство 55 ременной передачи поворота. Вал 56 ведомой конической шестерни установлен с возможностью вращения относительно вала 44 поворота, который сформирован совместно с валом 36 наклона. Ведомая коническая шестерня 57 установлена на одном конце вала 56 ведомой конической шестерни и соединена зубьями с ведущей конической шестерней 58, которая установлена на другом конце вала 51 ведущей конической шестерни. Другой конец вала 56 ведомой конической шестерни и элемент 46 поворота соединены с помощью понижающей передачи 59 поворота, которая построена по схеме гармонической понижающей передачи. На верхней поверхности в центральном сечении ступни 25 установлен датчик 60 усилия по шести осям, необходимый для обеспечения возможности ходьбы робота R на двух ногах и предназначенный для определения 6 компонентов усилия (нагрузки в трех направлениях взаимно перпендикулярных осей и моментов вокруг этих трех осей), которые действуют на ступню 25. На верхней поверхности задней части ступни 25 установлен усилитель 64 датчика 60 усилия по шести осям.
Механизм 61 поворота, обеспечивающий поворот ступни 25 по отношению к валу 36 наклона, сформирован из вала 44 поворота, элемента 46 поворота, вала 51 ведущей конической шестерни, ведущей конической шестерни 58, вала 56 ведомой конической шестерни, ведомой конической шестерни 57 и средства 55 ременной передачи поворота.
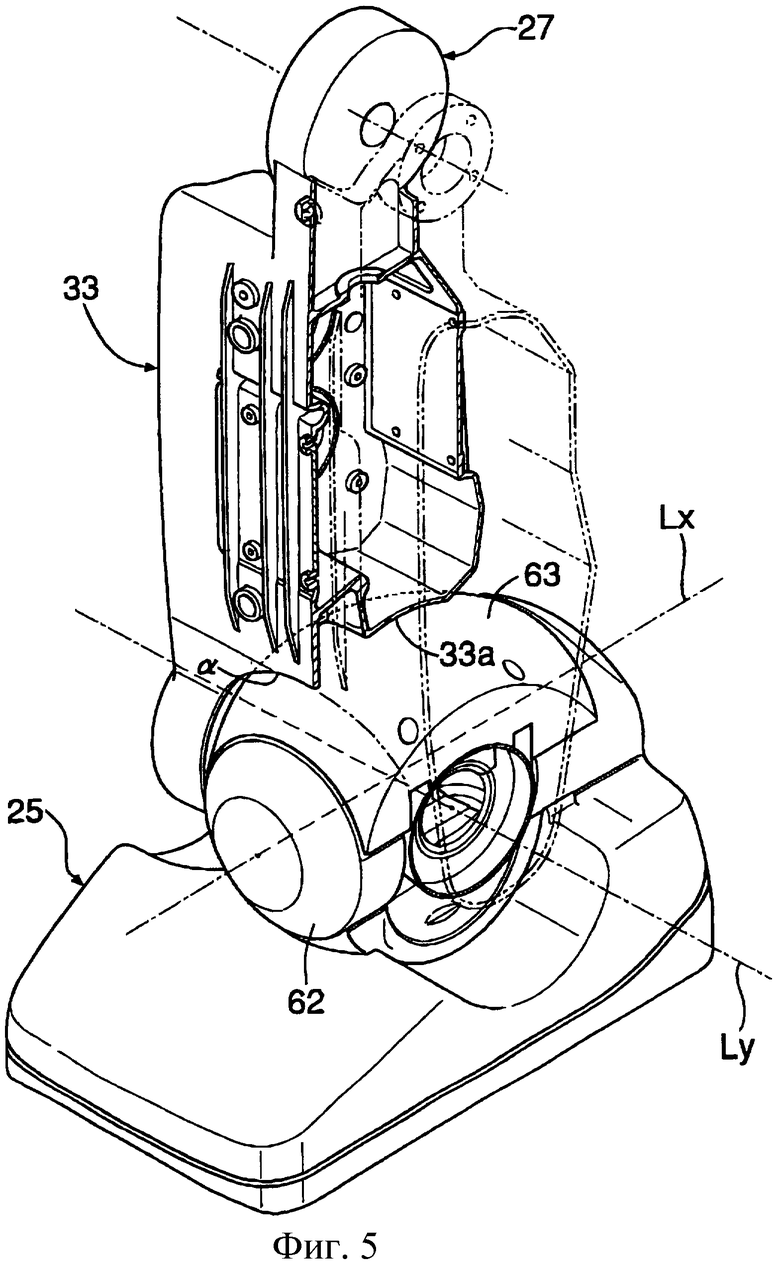
Как показано на фиг.5 - 7, голеностопный сустав 28, на котором установлена ступня 25 так, что она может наклоняться и поворачиваться по отношению к нижней части ноги 24, включает внутренний, частично сферический кожух 62 и внешний, частично сферический кожух 63, которые формируют часть концентрических сферических поверхностей, с центром в точке пересечения продольной оси Lx и поперечной оси Ly. Внутренний, частично сферический кожух 62 закреплен на элементе 46 поворота, в то время как внешний, частично сферический кожух 63 установлен на валу 36 наклона. В результате когда ступня 25 осуществляет наклон вокруг поперечной оси Ly, внутренний, частично сферический кожух 62 и внешний, частично сферический кожух 63 наклоняются как единый блок, и когда ступня 25 поворачивается вокруг продольной оси Lx, только внутренний, частично сферический кожух 62 поворачивается по отношению к внешнему, частично сферическому кожуху 63. Даже когда внешний, частично сферический кожух 63 и внутренний, частично сферический кожух 62 поворачиваются по отношению друг к другу, поскольку внутренний, частично сферический кожух 62 имеет форму, которая по существу обладает симметрией вращения по отношению к продольной оси Lx, часть сферы, сформированная из внешнего, частично сферического кожуха 63, и внутреннего, частично сферического кожуха 62, будет образована без каких-либо выступов или зазоров. На нижнем конце нижнего соединения 33 ноги сформирована вогнутая сферическая поверхность 33 а, и незначительный и равномерный зазор α образован между этой вогнутой сферической поверхностью 33а и поверхностями внешнего контура внешнего, частично сферического кожуха 63, и внутреннего, частично сферического кожуха 62.
Ниже поясняется работа устройства в соответствии с вариантом воплощения настоящего изобретения, имеющего описанную выше компоновку.
При включении двигателя 34 наклона для осуществления наклона ступни 25 вокруг поперечной оси Ly, причем ступня 25 соединена через голеностопный сустав 28 с нижним концом нижней части 24 ноги робота R, вращение выходного вала 34а передается на понижающую передачу 43 наклона через ведущий шкив 39, бесконечный ремень 41 и ведомый шкив 40 средства 42 ременной передачи наклона.
Понижающая передача 43 наклона уменьшает подводимую к ней скорость вращения и передает вращение на вал 36 наклона. Вращение вала 36 наклона вместе с установленным на нем валом 44 поворота вокруг поперечной оси Ly приводит к наклону ступни 25 вокруг поперечной оси Ly, при этом ступня 25 установлена на валу 44 поворота через элемент 46 поворота. Таким образом, даже при повороте вала 36 наклона в связи с тем, что вал 51 ведущей конической шестерни механизма 61 поворота установлен коаксиально и с возможностью относительного вращения внутри части 36 наклона, благодаря возможности свободного вращения двигателя 35 поворота исключается ненужный поворот ступни 25.
Когда включают двигатель 35 поворота для выполнения поворота ступни 25 вокруг продольной оси Lx, вращение выходного вала 35а двигателя 35 поворота передается на вал 51 ведущей конической шестерни через ведущий шкив 53, бесконечный ремень 54 и ведомый шкив 52 средства 55 ременной передачи поворота. Направление оси вращения вала 51 ведущей конической шестерни изменяется на 90° при переходе через ведущую коническую шестерню 58, ведомую коническую шестерню 57 и вал 56 ведомой конической шестерни, и затем передается на элемент 46 поворота через понижающую передачу 59 поворота, что позволяет осуществлять поворот ступни 25, при этом ступня 25 выполнена как единая деталь с элементом 46 поворота. Таким образом, поскольку механизм 61 поворота установлен на валу 36 наклона так, что он может наклоняться совместно со ступней 25, и ступня 25 выполнена с возможностью относительного поворота по отношению к валу 36 наклона, благодаря независимой работе механизма 61 поворота наклон и поворот не мешают друг другу и не смешиваются, и при этом упрощается управление наклоном и поворотом ступни 25.
Кроме того, двигатель 34 наклона и двигатель 35 поворота установлены на нижней части 24 ноги над голеностопным суставом 28, при этом положение установки двигателя 34 наклона и двигателя 35 поворота, которые представляют собой тяжелые детали, выбирают ближе к коленному суставу 27. В результате может быть уменьшен момент инерции нижней части 24 ноги вокруг коленного сустава 27, и нагрузка, прикладываемая к источнику привода коленного сустава 27, может быть уменьшена. Кроме того, поскольку двигатель 34 наклона и двигатель 35 поворота удалены от датчика 60 усилия по шести осям, который установлен на ступне 25, шумы двигателя 34 наклона и двигателя 35 поворота в меньшей степени влияют на датчик 60 усилия по шести осям, что улучшает точность работы датчика.
Кроме того, такая компоновка двигателя 34 наклона и двигателя 35 поворота позволяет уменьшить высоту расположения вала 36 наклона и вала 44 поворота и благодаря этому обеспечивается управление правильным положением голеностопного сустава 28 при меньшем управляющем усилии. Это позволяет обеспечить стабильную ходьбу благодаря быстрой реакции на неожиданно возникающие неровности и наклоны поверхности пола.
Кроме того, при наклоне ступни 25, поскольку внутренний, частично сферический кожух 62 и внешний, частично сферический кожух 63, центры которых расположены в точке пересечения поперечной оси Ly и продольной оси Lx, вращаются как единый блок, может поддерживаться постоянный зазор α между двумя кожухами 62, 63 и вогнутой сферической поверхностью 33а на нижнем конце нижнего соединения 33 ноги, что предотвращает таким образом попадание посторонних объектов внутрь механизма. Кроме того, при повороте ступни 25 внутренний, частично сферический кожух 62 вращается по отношению к внешнему, частично сферическому кожуху 63, и при этом зазор α не изменяется, что также предотвращает попадание посторонних объектов внутрь механизма. Кроме того, поскольку зазор α не изменяется, внутренний, частично сферический кожух 62 и внешний, частично сферический кожух 63 в меньшей степени мешает нижнему соединению 33 ноги, увеличивая таким образом диапазон движений голеностопного сустава 28.
Хотя выше был подробно описан вариант выполнения настоящего изобретения, настоящее изобретение может быть модифицировано различными способами, без отхода от его объема и сущности.
Например, в варианте выполнения элемент 46 поворота, на котором закреплена ступня 25, установлен с возможностью вращения на внешней окружности вала 44 поворота, ведущая коническая шестерня 58, установленная коаксиально внутри вала 36 наклона, соединена зубьями с ведомой конической шестерней 57, установленной коаксиально с валом 44 поворота и соединена с элементом 46 поворота, при этом ступня 25 имеет возможность наклона при вращении вала 36 наклона с помощью двигателя 34 наклона и может осуществлять поворот при вращении ведущей конической шестерни 58 с помощью двигателя 35 поворота. Элемент наклона (соответствующий вращающемуся элементу в соответствии с пунктом 3 формулы настоящего изобретения), на котором закреплена ступня 25, также может быть установлен с возможностью вращения на внешней окружности вала 36 наклона, при этом ведущая коническая шестерня 58, установленная коаксиально внутри вала 44 поворота, может быть выполнена так, чтобы она была в зацеплении с ведомой конической шестерной 57, установленной коаксиально внутри вала 36 наклона и соединенной с элементом наклона, при этом вращение вала 44 поворота будет осуществляться с помощью двигателя 35 поворота так, чтобы ступня 25 могла осуществлять поворот, и вращение ведущей конической шестерни 58 будет осуществляться с помощью двигателя 34 наклона так, чтобы осуществлять наклон ступни.
Кроме того, в варианте выполнения нагрузка, прилагаемая к ступне 25, определяется с помощью датчика 60 усилия по шести осям, но вместо него может быть установлен датчик, который позволяет определять от 3 до 5 компонентов усилия.
Промышленная применимость
Как описано выше, поскольку робот, передвигающийся на ногах, в соответствии с настоящим изобретением, может автономно ходить на двух ногах, его можно использовать для аттракционов и демонстраций.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩИЙ РОБОТ | 2001 |
|
RU2251480C2 |
| Устройство для тренировки ног | 1982 |
|
SU1087136A1 |
| ВЗРЫВОЗАЩИЩЕННЫЙ ШАГАЮЩИЙ РОБОТ | 2023 |
|
RU2832153C1 |
| ТРЕНИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ НОГ | 2005 |
|
RU2308307C1 |
| ДВУНОГИЙ РОБОТ | 2001 |
|
RU2257995C2 |
| ГОЛЕНОСТОПНОЕ ЗВЕНО ОРТЕЗА ИЛИ ЭКЗОСКЕЛЕТА | 2017 |
|
RU2687573C2 |
| ОРТОПЕДИЧЕСКОЕ УСТРОЙСТВО | 2013 |
|
RU2652893C2 |
| КРЕСЛО-СИДЕНЬЕ ДЛЯ РЕАБИЛИТАЦИИ БОЛЬНОГО ЦЕРЕБРАЛЬНЫМ ПАРАЛИЧОМ | 2004 |
|
RU2262914C1 |
| ТЕАТРАЛЬНАЯ КУКЛА И КИСТЬ КУКЛЫ | 2006 |
|
RU2349360C2 |
| Тренажерный комплекс для функциональной терапии нижних конечностей и способ его применения | 2017 |
|
RU2678916C1 |
Изобретение относится к конструкции ноги робота, передвигающегося на ногах. В конструкции ноги робота нижняя часть ноги соединена с нижним концом верхней части ноги с помощью коленного сустава, ступня соединена с нижним концом нижней части ноги через голеностопный сустав, и ступня установлена на голеностопном суставе так, что она может осуществлять наклон вокруг поперечной оси и поворот вокруг продольной оси по отношению к нижней части ноги. Ступня содержит датчик усилия по шести осям, предназначенный для определения нагрузки, прикладываемой к ступне. Конструкция ноги робота, передвигающегося на ногах, также содержит двигатель наклона, предназначенный для осуществления наклона ступни вокруг поперечной оси, причем двигатель наклона установлен на нижней части ноги над голеностопным суставом, и двигатель поворота, предназначенный для осуществления поворота ступни вокруг продольной оси, причем двигатель поворота установлен на нижней части ноги над голеностопным суставом. Изобретение позволит снизить момент инерции при вращении вокруг коленного сустава с одновременной минимизацией влияния шума двигателя на датчик, установленный в ступне. 3 н. и 5 з.п. ф-лы, 7 ил.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| 0 |
|
SU406018A1 | |
| ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2043915C1 |

