Предлагаемый радиолокационный способ измерения дальности движущегося объекта на основе фазового метода предназначен для измерения с заданной точностью дальности движущихся линейно с большой скоростью и перемещающихся на значительные расстояния объектов, например боеприпасов при полигонных испытаниях.
К числу основных методов дальнометрии в радиолокации относится фазовый метод. Он заключается в определении фазовых сдвигов между излучаемыми и отраженными непрерывными сигналами, а разность фаз служит мерой дальности. Реализация этого метода на основе системы с одной фиксированной частотой не нашла практического применения из-за малой однозначно измеряемой дальности (см. Свистов В.М. Радиолокационные сигналы и их обработка. - М.: Советское радио, 1977, - 448 с., с. 299-300). Фазовый метод нашел практическое применение в двухчастотных системах, в которых зондирующий сигнал складывается из двух гармонических колебаний с мало отличающимися частотами. Разность этих частот является масштабной частотой (частотой биений) или разностной частотой. Измеряют величину разности фаз колебаний с разностной частотой, которые выделяют с помощью смесителей из излучаемого и принимаемого сигналов. Дальность цели вычисляют с применением измеренной разности фаз колебаний масштабной (разностной) частоты и величины масштабной (разностной) частоты. Для увеличения точности применяемого в практических системах метода используют несколько масштабных (разностных) частот, например, последовательно. Наименьшая масштабная (разностная) частота выбирается из условия однозначности измерений и определяет наиболее грубую шкалу дальности. Следующая более высокая масштабная (разностная) частота определяет вторую более точную шкалу дальности. Самую большую масштабную частоту выбирают согласно требуемой точности измерений (см. Теоретические основы радиолокации: Учебн. пособие для вузов /А.А.Коростелев, Н,Ф.Клюев, Ю.А.Мельник и др. Под ред. В.Е.Дулевича. - 2-е изд., перераб. и доп. - М.: Сов. Радио, 1978, 608 с., с. 217-220). В случае движущихся целей измеряется разность фаз доплеровских сигналов, выделенных при использовании соответствующих колебаний прямого (зондирующего) и отраженного сигналов от одной цели (см. Свистов В.М. Радиолокационные сигналы и их обработка. - М.: Советское радио, 1977, 448 с., с. 300-301). Известна практическая реализация фазового метода для движущихся целей: двухчастотная система измерения дальности движущихся целей (см. Вишин Г.М. Многочастотная радиолокация. - М.: Воениздат, 1973, - 92 с, с. 44-48). В системе (РЛС) формируют зондирующий сигнал, содержащий два непрерывных гармонических колебания с мало отличающимися по величине частотами. Затем принимают отраженный сигнал, смешивают соответствующие колебания излучаемых и принимаемых сигналов, выделяют доплеровские частоты, измеряют разности фаз между ними для расчета дальности цели. К величине разноса частот колебаний предъявляются противоречивые требования. Если им невозможно удовлетворить при двух колебаниях в зондирующем сигнале, увеличивают число вырабатываемых РЛС несущих колебаний, при этом разнос двух частот колебаний выбирается небольшим из условия однозначного определения дальности, а разнос следующей частоты выбирается достаточно большим для достижения заданной точности измерения и кратным величине разноса первых двух частот.
В двухчастотных радиолокационных системах на основе фазового метода для увеличения максимальной дальности измерений минимальную разностную частоту излучаемых колебаний уменьшают до величины, которая должна быть вдвое больше максимальной доплеровской частоты цели. Скорости движения современных боеприпасов, перемещающихся на значительные расстояния, достигают 3000 м/с. При проведении измерений дальности с применением фазового метода появляются максимальные доплеровские частоты до 210 кГц. Увеличение величин доплеровских частот приводит к уменьшению однозначно измеряемой дальности, которой бывает недостаточно для полигонных измерений. Повышение точности измерений дальности у двухчастотных систем на основе фазового метода предполагает проведение последовательных измерений с другими масштабными частотами, то есть увеличение времени измерений дальности объекта, перемещающегося со значительной скоростью на траектории.
Предлагается радиолокационный способ измерения дальности движущегося объекта на основе фазового метода с применением РЛС, вырабатывающей непрерывные гармонические колебания с начальной частотой и частотами, разнесенными относительно начальной частоты на заданные величины, включающий последовательное зондирование объекта сигналами РЛС, представляющими пары непрерывных гармонических колебаний с одинаковой частотой у одного колебания и с остальными частотами РЛС у другого колебания, смешение колебаний зондирующего и отраженного сигналов, выделение доплеровских частот и измерение их разности фаз на каждом интервале времени зондирования сигналом, в котором для зондирования используют три и более частоты колебаний, для одинаковой частоты у одного колебания зондирующих сигналов используют частоту, максимально разнесенную относительно начальной частоты, и на интервалах времени зондирования каждым сигналом определяют фазу доплеровской частоты, являющуюся доплеровским сдвигом частоты колебаний, максимально разнесенной относительно начальной частоты, а затем разности фаз доплеровских частот для других зондирующих сигналов по расчетной формуле:
где ΔφДNДL - разность фаз φДN и φДL доплеровских частот fДN и fДL на интервале времени зондирования одним сигналом;
ΔfЗNЗL - разнос частот колебаний зондирующего сигнала fЗN и fЗL;
fЗN - одинаковая частота колебания в зондирующих сигналах, максимально разнесенная относительно начальной частоты;
N - номер частоты колебаний, максимально разнесенной относительно начальной частоты;
L - номера частот колебаний от 1 до N-1;
φДN - фаза доплеровской частоты, являющейся доплеровским сдвигом частоты колебаний, максимально разнесенной относительно начальной частоты (одинаковой для всех зондирующих сигналов), на интервале времени зондирования одним сигналом, величины соответствующих разностей фаз доплеровских частот используют для вычислений разностей фаз доплеровских частот для сигналов для зондирования, в которых используют в качестве одинаковой частоты начальную частоту, на том же интервале зондирования.
Техническим результатом предложенного способа является увеличение однозначно измеряемой дальности и увеличения количества измерений дальности объекта на траектории.
Использование двухчастотных систем (РЛС) для измерения дальности объектов, движущихся с большими скоростями и на значительные расстояния, на основе известного фазового метода приводит к уменьшению предела однозначного измерения дальности из-за увеличения величины максимальной доплеровской частоты (см. Вишин Г.М. Многочастотная радиолокация. - М.: Воениздат, 1973, - 92 с., с.47). При практической реализации метода увеличение максимальной доплеровской частоты приводит к появлению дополнительных помех при приеме слабых отраженных сигналов, усложнению задачи фильтрации полезного сигнала. Для получения необходимой точности измерений дальности применяются системы с несколькими частотами непрерывных гармонических колебаний, зондирование объекта осуществляется сигналами, у которых частота одного колебания, относительно которой осуществляется разнос других частот системы, остается неизменной в каждой паре, а частотами другого колебания в парах становятся в заданном порядке остальные частоты системы (РЛС). Результаты измерений, сделанных за время зондирования движущегося объекта последовательностью сигналов, в которой частотами одного колебания в парах однократно в заданном порядке являются остальные частоты системы, применяются для расчета дальности. Увеличение количества используемых частот непрерывных гармонических колебаний в системах при проведении измерений дальности объекта, перемещающегося с большой скоростью, позволяет получить результат измерения после прохождения им значительного расстояния на траектории.
На чертеже в Декартовой системе координат представлены мощности и частоты четырех непрерывных гармонических колебаний, вырабатываемых РЛС, образующих пары колебаний зондирующих сигналов, где 1 - начальная частота; 2 - вторая частота; 3 - третья частота; 4 - частота, максимально отстоящая от начальной частоты 1.
Для реализации предложенного способа применяется РЛС с непрерывными гармоническими колебаниями с тремя и более частотами, например частотами 1, 2, 3, 4. Частоты 2, 3, 4, разнесены относительно начальной частоты 1 на заданные величины, которые являются величинами разностных (масштабных) частот, необходимых для однозначного измерения дальности с заданной точностью, например, величинами указанных разносов частот колебаний могут быть соответственно: 10 кГц, 100 кГц, 1000 кГц для РЛС с частотным диапазоном 10400-10600 МГц. Разнос между частотами 1 и 2 минимальный по сравнению с разносами других частот РЛС: 3, 4 относительно начальной частоты 1. Минимальный разнос устанавливает однозначно измеряемую дальность. Разнос между 1 и 4 частотами максимален в приведенном примере. РЛС осуществляет последовательное зондирование летящего объекта сигналами, содержащими пары колебаний, в которых частотой одного колебания является частота 4, максимально отстоящая от начальной частоты 1, а остальные частоты РЛС: 1, 2, 3, являются частотами другого колебания. Эти частоты сменяют друг друга, например, последовательно, начиная с начальной частоты 1, образуя повторяющиеся последовательности сигналов со следующими частотами колебаний: 4-1; 4-2; 4-3. Разносы частот в зондирующих сигналах с парами частот колебаний 4-2 и 4-3 соответственно 990 кГц и 900 кГц и существенно больше разносов частот колебаний РЛС: 1-2 и 1-3 соответственно 10 кГц и 100 кГц. За время зондирования объекта каждым зондирующим сигналом осуществляется прием отраженного от цели зондирующего сигнала, смешение колебаний зондирующего (прямого) и отраженного сигналов, выделение доплеровских частот, а затем измерение (фазометром) разности фаз выделенных доплеровских сигналов. Далее осуществляется обработка результатов измерений и вычисление дальности по формуле (см. Вишин Г.М. Многочастотная радиолокация. - М.: Воениздат, 1973, - 92 с., с.46):

где ΔφД - разность фаз доплеровских частот, являющихся доплеровским сдвигом частот непрерывных гармонических колебаний зондирующего сигнала;
Δf3 - разнос частот (разностная частота) колебаний зондирующего сигнала;
С - скорость света.
Обработка полученных результатов измерений осуществляется с учетом следующих сведений. Известно, что доплеровские частоты fД1 и fД2 пропорциональны частотам колебаний fЗ1 и fЗ2 зондирующего сигнала РЛС (см. Вишин Г.М. Многочастотная радиолокация. - М.: Воениздат, 1973, - 92 с., с.46). При зондирования движущегося объекта сигналом РЛС, содержащим два непрерывных гармонических колебания с частотами fЗ1 и fЗ2, в пределах интервала измерений определяют величины доплеровских частот fД1 и fД2 по известной формуле соответственно:

где VP - радиальная скорость движущегося объекта;
fЗ1 и fЗ2 - частоты непрерывных гармонических колебаний зондирующего сигнала;
С - скорость света.
Отношение указанных доплеровских частот соответственно равно:

где fД1 и fД2 - доплеровские сдвиги (доплеровские частоты) частот непрерывных гармонических колебаний зондирующего сигнала fЗ1 и fЗ2;
fЗ1 и fЗ2 частоты колебаний зондирующего сигнала;
ξ12 - коэффициент, увязывающий значения двух определенных доплеровских частот. Из (3) вытекает, что при одновременном зондировании объекта сигналом, содержащим два непрерывных гармонических колебания с известными частотами, и при одной известной доплеровской частоте можно установить величину другой доплеровской частоты на этом интервале измерения:

где fД1 и fД2 - доплеровские сдвиги (доплеровские частоты) частот гармонических колебаний зондирующего сигнала fЗ1 и fЗ2;
ξ12 - коэффициент, увязывающий значения двух определенных доплеровских частот. Проинтегрируем обе части выражения (4) по времени в пределах интервала измерения и получим:

где φД1, φД2 - фазы первой и второй доплеровских частот на интервале измерения;
φД10, φД20 - начальные фазы первой и второй доплеровских частот;
ξ12- коэффициент, увязывающий значения двух определенных доплеровских частот. Выражение (5) можно представить следующим образом:

Правая часть выражения (б), представляющая разность начальных фаз первой и второй доплеровских частот, может быть установлена в процессе калибровки системы для любой пары частот зондирования и приравнена к нулю и тогда выражение (5) преобразуем до следующего вида:

где - φД1 и φД2 - фазы первой и второй доплеровских частот за время интервала измерения;
ξ12 - коэффициент, увязывающий значения двух определенных доплеровских частот;
fЗ1 и fЗ2 первая и вторая частоты колебаний зондирующего сигнала;
ΔfЗ1З2 - разнос частот (разностная частота) колебаний зондирующего сигнала fЗ1 и fЗ2. Используя (7), находят разность фаз φД1 и φД2 на том же интервале измерений:

где ΔφД1Д2 - разность фаз φД1 и φД2 доплеровских частот fД1 и fД2;
ΔfЗ1З2 - разнос частот (разностная частота) колебаний зондирующего сигнала fЗ1 и fЗ2;
fЗ1 - первая частота колебаний зондирующего сигнала;
Из формулы (8) следует, что при известной частоте одного колебания зондирующего сигнала и при известной фазе доплеровской частоты, являющейся доплеровским сдвигом этой частоты, можно на том же измерительном интервале (интервале измерения) определить разность фаз доплеровских частот для сигналов для зондирования с любыми частотами у второго колебания, имеющими известные разносы частот относительно известной частоты зондирующего сигнала. При зондировании объекта, например, сигналом с частотами колебаний 4-1 измеряют разность фаз доплеровских частот ΔφД4Д1, далее, применяя формулу (8), получают на том же интервале измерений (интервале времени зондирования) φД4 - величину фазы доплеровской частоты, являющейся доплеровским сдвигом частоты 4, а затем, применяя формулу (8), вычисляют ΔφД4Д2 и ΔφД4Д3 - разности фаз доплеровских частот для сигналов для зондирования с частотами 4-2 и 4-3 (разносы указанных частот известны) на том же интервале измерений (интервале времени зондирования). Таким образом, на одном интервале измерения при зондировании движущегося объекта одним сигналом (в нашем случае сигналом с частотами колебаний 4-1) известны разности фаз доплеровских частот для сигналов РЛС с частотами: 4-1, 4-2 и 4-3. Используя известные величины разностей фаз доплеровских частот: ΔφД4Д1 и ΔφД4Д2, для сигналов для зондирования с частотами колебаний 4-1 и 4-2 соответственно вычисляют разность фаз доплеровских частот - ΔφД1Д2 для сигнала с частотами колебаний: 1-2 на том же временном интервале (интервале времени зондирования). Используя известные величины разностей фаз доплеровских частот: ΔφД4Д1 - для зондирующего сигнала с частотами колебаний 4-1 и ΔφД4Д3 - для сигнала для зондирования с частотами колебаний 4-3, вычисляют ΔφД1Д3 - разность фаз доплеровских колебаний для сигналов с частотами 1-3 на том же временном интервале. Используя измеренную величину ΔφД4Д1 для сигнала с частотами колебаний 4-1, вычисляют ΔφД1Д4 - разность фаз доплеровских колебаний для сигналов с частотами 1-4 на том же временном интервале (интервале времени зондирования). Далее, на интервале времени, на котором проводится зондирование объекта одним сигналом, например, с частотами колебаний 4-1, или иначе, на интервале времени зондирования вычисляют величины разностей фаз доплеровских частот: ΔφД1Д4, ΔφД1Д2 и ΔφД1Д3 (разносы частот колебаний 2, 3, 4 относительно начальной частоты 1 известны заранее). Далее соответствующие величины подставляют в формулу (1) и вычисляют дальность летящего объекта с заданной точностью, заданной разносом частоты 4 относительно начальной частоты 1 на том же интервале времени зондирования. На следующем интервале измерения при зондировании объекта сигналом с частотами колебаний 4-2 измеряют разность фаз доплеровских частот: ΔφД4Д2, далее проводят те же описанные выше операции: используя формулу (8), вычисляют фазу доплеровской частоты φД4, являющуюся доплеровским сдвигом частоты 4 на этом интервале измерения (интервале времени зондирования), затем, используя формулу (8), находят разности фаз доплеровских частот: ΔφД4Д1, ΔφД4Д3 для сигналов для зондирования со следующими частотами колебаний: 4-1 и 4-3 и, используя величины ΔφД4Д1, ΔφД4Д1 и ΔφД4Д2, ΔφД4Д1 и ΔφД4Д3, вычисляют соответственно величины разностей фаз доплеровских частот: ΔφД1Д1, ΔφД1Д2, ΔφД1Д3 для сигналов с парами частот РЛС: 1-4, 1-2, 1-3, далее вычисляют дальность с заданной точностью на этом интервале измерения (интервале времени зондирования). На интервале измерения при зондировании объекта сигналом с частотами колебаний 4-3 измеряют разность фаз доплеровских частот: ΔφД4Д3, далее проводят те же описанные выше операции: используя формулу (8), вычисляют фазу доплеровской частоты φД4, являющуюся доплеровским сдвигом частоты 4 на этом интервале измерения (интервале времени зондирования), затем, используя формулу (8), находят разности фаз доплеровских частот: ΔφД4Д1, ΔφД4Д2 для сигналов для зондирования со следующими частотами колебаний: 4-1 и 4-2, затем, используя величины ΔφД4Д1, ΔφД4Д1 и ΔφД4Д2, ΔφД4Д1 и ΔφД4Д3, вычисляют величины разностей фаз доплеровских частот: ΔφД1Д4, ΔφД1Д2, ΔφД1Д3 для сигналов с парами частот РЛС: 1-4, 1-2, 1-3, далее вычисляют дальность с заданной точностью на этом интервале измерения (интервале времени зондирования). Далее согласно условиям примера зондирование объекта будет осуществляться сигналами, содержащими те же частоты и в том же порядке. Для проведения измерений дальности на одном интервале измерения (интервале времени зондирования) необходимы три и более частоты.
Предложенный способ может быть реализован с помощью РЛС, вырабатывающей непрерывные гармонические колебания с тремя и более частотами, имеющей мощность излучения, достаточную для сопровождения движущегося объекта на заданное расстояние, способную осуществлять селекцию объекта по скорости его движения, имеющей регистрирующее и вычислительное устройства. Перед полигонными измерениями должна быть проведена работа по установке начальных фаз. В вычислительном устройстве вычисления с применением результата измерений могут проводиться с разрывом во времени по отношению к моменту его получения или в темпе опыта при использовании соответствующего программного обеспечения. В предложенном способе в отличие от известного способа частота одного колебания, одинаковая для всех зондирующих сигналов, выбирается максимально отстоящей от начальной частоты РЛС, поэтому для второго колебания зондирующих сигналов коммутируется другой набор остальных частот РЛС. Для целей полигонных измерений дальности одного летящего боеприпаса применяются РЛС с частотным диапазоном 10400-10600 МГц, и обычно разнос частот РЛС выбирается кратным десяти, например 10 кГц, 100 кГц, 1000 кГц.
В предложенном способе для зондирующего сигнала не используется пара колебаний с частотами 1 и 2, разносом частот между которыми задается максимальная дальность однозначных измерений. При использовании предложенного способа для проведения однозначных измерений на заданной дальности уменьшают разнос указанных частот до необходимой величины. При приеме слабых отраженных колебаний у РЛС, реализующей способ, не возникает помех в пределах полосы пропускания доплеровских фильтров из-за применения в зондирующих сигналах частот колебаний с большим разносом частот. За время зондирования объекта одним сигналом, кроме измеренного значения разности фаз доплеровских частот, с помощью расчета получают величину фазы доплеровской частоты, являющуюся доплеровским сдвигом частоты, максимально разнесенной относительно начальной частоты, а затем разности фаз доплеровских частот для последовательности зондирующих сигналов. Эта последовательность образована зондирующими сигналами, у которых для второго колебания используют однократно другие частоты РЛС. После проведения простых преобразований получают величину дальности с заданной точностью на этом временном интервале. В предложенном способе дальность до цели определяется за время зондирования летящего объекта одним зондирующим сигналом, что позволяет увеличить количество измерений дальности на траектории.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения и высокоточного определения параметров морских ледовых полей и радиолокационная система для его реализации | 2019 |
|
RU2723437C1 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 1991 |
|
RU2007046C1 |
| СПОСОБ АКТИВНОЙ РАДИОЛОКАЦИИ | 2012 |
|
RU2498339C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 2013 |
|
RU2529867C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛИ В РЛС С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2018 |
|
RU2699240C1 |
| Способ радиолокационного моноимпульсного измерения дальности и радиальной скорости целей при зондировании сигналом с линейной частотной модуляцией | 2022 |
|
RU2796220C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2539914C1 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 2003 |
|
RU2234808C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСТОЯННОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ПО ДАЛЬНОСТИ В ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С КВАЗИСЛУЧАЙНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2491572C1 |
Изобретение относится к радиолокационному способу измерения дальности движущегося объекта на основе фазового метода. Сущность заявленного способа заключается в том, что осуществляют последовательное зондирование объекта сигналами РЛС, представляющими пары непрерывных гармонических колебаний с одинаковой частотой у одного колебания и остальными частотами РЛС у другого колебания. Отличительной особенностью способа является выбор в качестве одинаковой для всех зондирующих сигналов частоты, максимально разнесенной относительно начальной частоты, означающий использование пар частот для зондирующих сигналов, имеющих большие разносы частот. После смешения колебаний зондирующего и отраженного сигналов на том же интервале зондирования осуществляют выделение доплеровских частот и измерение их разности фаз. На интервалах времени зондирования одним сигналом определяют фазу доплеровского сигнала, являющегося доплеровским сдвигом частоты колебаний зондирующего сигнала, максимально разнесенной относительно начальной частоты, и разности фаз доплеровских частот других зондирующих сигналов по определенной расчетной формуле, Величины соответствующих разностей фаз доплеровских частот используют для вычислений разностей фаз доплеровских частот для сигналов зондирования, в которых используют в качестве одинаковой частоты начальную частоту на том же временном интервале. Достигаемый технический результат - увеличение однозначно измеряемой дальности и увеличение количества измерений с заданной точностью на траектории движущегося объекта.1 ил.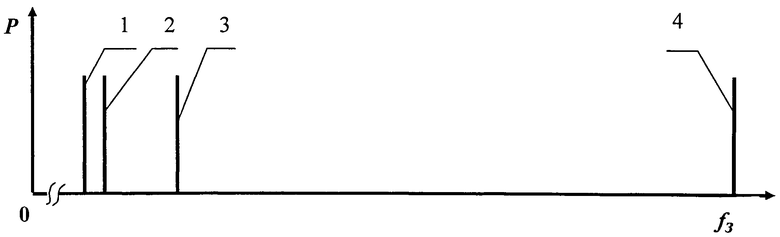
Радиолокационный способ измерения дальности движущегося объекта на основе фазового метода с применением РЛС, вырабатывающей непрерывные гармонические колебания с начальной частотой и частотами, которые разнесены относительно начальной частоты на заданные величины, включающий последовательное зондирование объекта сигналами РЛС, представляющими пары непрерывных гармонических колебаний с одинаковой частотой у одного колебания и остальными частотами РЛС у другого колебания, смешение колебаний зондирующего и отраженного сигналов, выделение доплеровских частот и измерение их разности фаз на каждом интервале времени зондирования одним зондирующим сигналом, отличающийся тем, что, для зондирования объекта используют три и более частоты непрерывных гармонических колебаний РЛС, в зондирующих сигналах используют для одинаковой частоты колебаний частоту, разнесенную относительно начальной частоты на максимальную величину, и на интервалах времени зондирования определяют также фазу доплеровского сигнала, являющегося доплеровским сдвигом частоты колебаний зондирующего сигнала, максимально разнесенной относительно начальной частоты, а затем разности фаз доплеровских частот других зондирующих сигналов по расчетной формуле:
 ,
,
где ΔφДNДL - разность фаз φДN и φДL доплеровских частот fДN и fДL на интервале времени зондирования одним сигналом;
ΔfЗNЗL - разнос частот колебаний зондирующего сигнала fЗN и fЗL
fЗN - одинаковая частота колебания в зондирующих сигналах, максимально разнесенная относительно начальной частоты;
N - номер (одинаковой) частоты колебаний в зондирующих сигналах, максимально разнесенной относительно начальной частоты;
L - номера частот колебаний от 1 до N-1;
φДN - фаза доплеровской частоты, являющейся доплеровским сдвигом частоты колебаний зондирующего сигнала, максимально разнесенной относительно начальной частоты.
и величины соответствующих разностей фаз доплеровских частот используют для вычислений разностей фаз доплеровских частот для сигналов для зондирования, в которых используют в качестве одинаковой частоты начальную частоту на том же временном интервале.
| Теоретические основы радиолокации | |||
| Под ред | |||
| ДУЛЕВИЧА В.Е., Москва, Советское Радио, 1978, с.217-220 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И ДАЛЬНОСТИ ОБЪЕКТА | 2007 |
|
RU2393499C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
| СПОСОБ ИЗМЕРЕНИЯ БОРТОВОЙ ПАССИВНОЙ СИСТЕМОЙ НАБЛЮДЕНИЯ ПЕРЕМЕЩЕНИЙ ДВИЖУЩЕГОСЯ ОБЪЕКТА И ДАЛЬНОСТИ ДО НЕГО | 2008 |
|
RU2381523C2 |
| JP 2011102749 A, 26.05.2011 | |||
| US 7132975 B2, 07.11.2006 | |||
| WO 2008105892 A3, 05.02.2009 | |||

