Изобретение относится к железнодорожному транспорту, а именно к области управления тяговым подвижным составом (ТПС) на электрифицированных железных дорогах и предназначено для автоматизированного управления тягой и тормозами, а также другим оборудованием с соблюдением требований безопасности движения всех типов ТПС как постоянного, так и переменного тока, включая аналоговое управление, распределенную и кратную тягу, регистрацию параметров движения, напряжения контактной сети и потребляемых токов, состояния тягового привода, скоростей вращения колесных пар, параметров тормозной системы, состояния и показаний приборов безопасности, состояния электрооборудования и экипажа ТПС, величин ускорений по 3 проекциям на сменном носителе, с возможностью реализации функций скоростемера, скоростемерной ленты и счетчика потребленной энергии, для реализации функции электронного маршрута машиниста на ТПС, диагностирования ТПС.
Известно устройство для автоматизированного управления тяговым подвижным составом, содержащее средства управления, связанные с блоком регистрации, внешним блоком накопления информации, блоками ввода аналоговых и дискретных сигналов, измерительным блоком и установленными на пульте машиниста средствами индикации (О.М.Котов «АСУ локомотивом: реальность и перспективы», журнал «Локомотив» №8 за 1998 г., стр.12-14).
Техническим результатом, на достижение которого направлено данное изобретение, является возможность автоматизированное управление тягой, всеми типами тормозов и другим оборудованием ТПС как непосредственно, так и через специальные системы, унифицированные по интерфейсу, например с микропроцессорной системой управления локомотивом - МСУЛ, съем и передачу в регистратор и центральный вычислитель ТПС информации с произвольного количества разнотипных датчиков: давления, температуры, напряжения, тока, скорости, ускорения, съем и передачу в регистратор и центральный вычислитель состояния цепей ТПС и приборов безопасности, регистрацию параметров движения, автоведения и диагностики с автоматической записью информации на сменный носитель, связь с другими системами, установленными на ТПС, включая приборы безопасности, по отдельной шине, например CAN шине, загрузку программного обеспечения любого уровня во все блоки комплекса через единый интерфейс. Техническим результатом является также унификация интерфейса всех блоков комплекса на основе, например, CAN - интерфейса с возможностью подключения как известных блоков, так и принципиально новых блоков.
Технический результат достигается тем, что в устройстве для автоматизированного управления тяговым подвижным составом, содержащем средства управления, связанные с блоком регистрации, внешним блоком накопления информации, блоками ввода аналоговых и дискретных сигналов, измерительным блоком и установленными на пульте машиниста средствами индикации, средства управления включают в себя системный блок, блок дискретного управления и блок аналогового управления, системный блок состоит из мастер-модуля, модуля питания, кросс-платы, модуля CPU и внутреннего дублирующего блока накопления информации, при этом мастер-модуль предназначен для выполнения следующих функций: сетевого управления с возможностью использования протокола верхнего уровня CAN, управления нижнего уровня при реализации модулем CPU функции автоведения, связи с блоками комплекса по системному CAN - интерфейсу, связи по CAN - интерфейсу с внешними системами, загрузки программного обеспечения и данных, хранящихся на внешнем блоке накопления информации в блоки комплекса, по CAN - интерфейсу, циклической перезаписи информации с внешнего блока накопления информации на внутренний дублирующий блок накопления информации, задания системного времени, контроля температуры внутри системного блока, при этом мастер-модуль установлен в установочном месте, предусмотренном в пульте управления локомотивом, с возможностью обмена информацией с центральным вычислителем пульта управления, связанным посредством общей информационной шины со следующими узлами: микропроцессорным блоком управления и блоком связи аппаратуры микропроцессорной системы управления локомотивом, блоком согласования интерфейсов аппаратуры комплекса локомотивных устройств безопасности, блоком контроллера и блоком приемника аппаратуры системы контроля бодрствования машиниста.
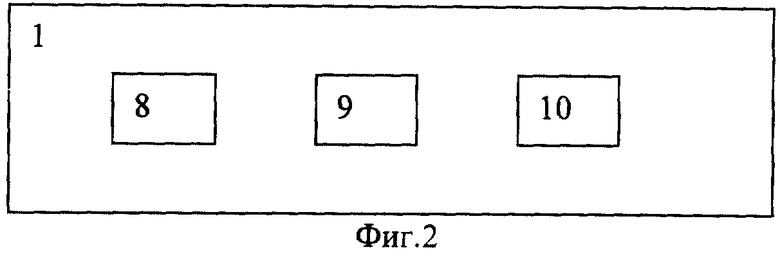
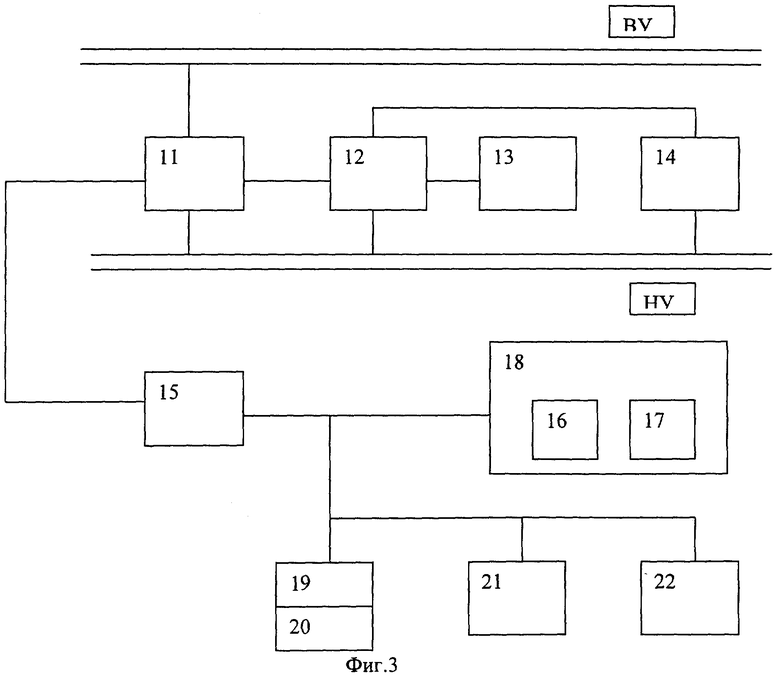
На фиг.1, 2 и 3 представлена структурная схема устройства. Устройство для автоматизированного управления тяговым подвижным составом содержит (фиг.1) средства 1 управления, связанные с блоком 2 регистрации, внешним блоком 3 накопления информации, блоками 4 и 5 ввода аналоговых и дискретных сигналов, измерительным блоком 6 и установленными на пульте машиниста средствами 7 индикации. Средства 1 управления включают в себя (фиг.2) системный блок 8, блок 9 дискретного управления и блок 10 аналогового управления. Системный блок состоит (фиг.3) из мастер-модуля 11, модуля 12 питания, модуля 13 CPU и внутреннего дублирующего блока 14 накопления информации. Мастер-модуль 11 предназначен для выполнения следующих функций: сетевого управления с возможностью использования протокола верхнего уровня CAN (условно ВУ), управления нижнего уровня (условно НУ) при реализации модулем 13 CPU функции автоведения, организации связи с другими блоками устройства по системному CAN - интерфейсу, связи по CAN - интерфейсу с внешними системами, загрузки программного обеспечения и данных, хранящихся на внешнем блоке 3 накопления информации в блоки комплекса по CAN - интерфейсу, циклической перезаписи информации с внешнего блока 3 накопления информации на внутренний дублирующий блок 14 накопления информации, задания системного времени, контроля температуры внутри системного блока 8. Мастер-модуль 11 установлен в установочном месте, предусмотренном в пульте машиниста, с возможностью обмена информацией с центральным вычислителем пульта 15 управления, связанным посредством общей информационной шины со следующими узлами: микропроцессорным блоком управления 16 и блоком связи 17 аппаратуры микропроцессорной системы 18 управления локомотивом, блоком 19 согласования интерфейсов аппаратуры комплекса локомотивных устройств 20 безопасности, блоком 21 контроллера и блоком 22 приемника аппаратуры системы контроля бодрствования машиниста.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система связи и дистанционного управления для скоростного электропоезда | 2021 |
|
RU2754376C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИОННЫХ СООБЩЕНИЙ В МИКРОПРОЦЕССОРНЫХ СИСТЕМАХ УПРАВЛЕНИЯ И ДИАГНОСТИКИ | 2015 |
|
RU2577196C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ЭЛЕКТРОПОЕЗДА | 2018 |
|
RU2733594C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДОВ КОМПЛЕКСНАЯ | 2019 |
|
RU2732495C1 |
| СИСТЕМА КОНТРОЛЯ ТЕХНОЛОГИЧЕСКОЙ ДИСЦИПЛИНЫ ПРОЦЕССА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ (СКТД) | 2005 |
|
RU2307041C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| Способ и устройство контроля самопроизвольного трогания поезда | 2015 |
|
RU2611469C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2023 |
|
RU2818401C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ МОТОРВАГОННОГО ПОДВИЖНОГО СОСТАВА | 2022 |
|
RU2790985C1 |
Изобретение относится к электрифицированному железнодорожному транспорту. Устройство содержит средства управления, связанные с блоком регистрации, внешним блоком накопления информации, блоками ввода аналоговых и дискретных сигналов, измерительным блоком и установленными на пульте машиниста средствами индикации. Средства управления включают в себя системный блок и блоки дискретного и аналогового управления. Системный блок состоит из мастер-модуля, модуля питания, модуля CPU и внутреннего дублирующего блока накопления информации. Мастер-модуль установлен в пульте управления локомотивом с возможностью обмена информацией с центральным вычислителем пульта управления, связанным посредством общей информационной шины с микропроцессорным блоком управления и блоком связи аппаратуры микропроцессорной системы управления локомотивом, блоком согласования интерфейсов аппаратуры комплекса локомотивных устройств безопасности, блоком контроллера и блоком приемника аппаратуры системы контроля бодрствования машиниста. Изобретение позволяет автоматизировать управление тягой, всеми типами тормозов и другим оборудованием тягового подвижного состава как непосредственно, так и через специальные системы, унифицированные по интерфейсу. 1 з.п. ф-лы, 3 ил.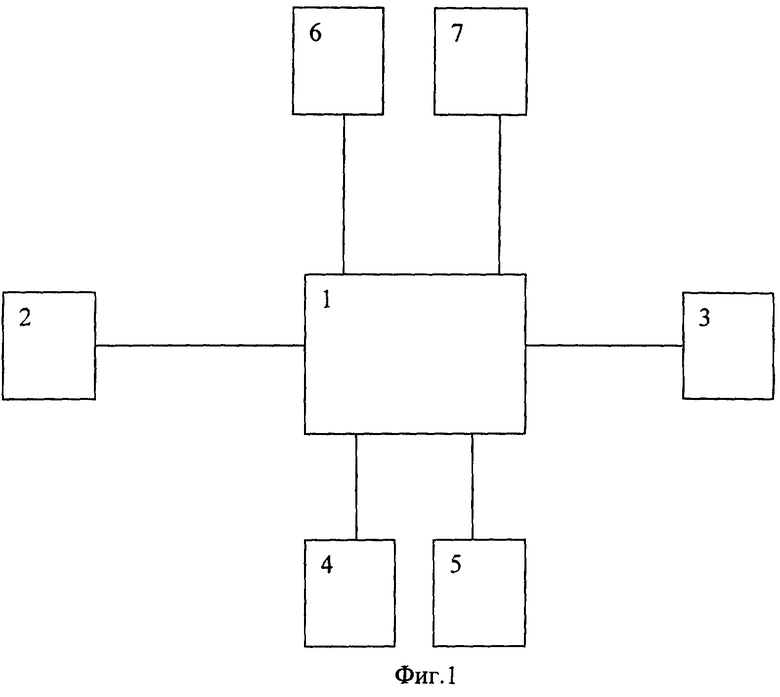
| КОТОВ О.М | |||
| АСУ локомотивом: реальность и перспективы | |||
| - «Локомотив», 1998, №8, с.12-14 | |||
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182086C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ПОДВИЖНЫМ СОСТАВОМ | 2000 |
|
RU2179515C2 |
| Устройство для управления движением поездов | 1977 |
|
SU673509A1 |

