Изобретение относится к области радиотехники и может быть использовано в радиопеленгации для определения местоположения VSAT-станции в спутниковой сети.
Операторы спутниковой связи несут реальные убытки от несанкционированного использования их частотно-энергетического ресурса. Если определить местоположение источника сигналов («пиратской» VSAT-станции), то в последствие можно вести борьбу с нарушителем уже на законной правовой основе. Предлагаемый способ определения местоположения VSAT-станции в спутниковой сети позволяет решить указанную задачу техническими средствами.
Известны способы определения местоположения земной станции спутниковой связи по ретранслированному сигналу, реализованные в комплексах радиомониторинга (см., например, Патент РФ №2172495, G01S 5/00, 5/06 2000 г., Патент РФ №2292560, G01S 5/00, 2005 г.), заключающиеся в измерении значений доплеровского сдвига несущей частоты сигнала для трассы земная станция - спутник - приемная земная станция и последующего усреднения результатов для определения местоположения станции или измерении амплитуды принятых радиосигналов на контрольных пунктах, передачу с периферийных пунктов на центральный пункт измеренных значений амплитуды, преобразование всех измеренных значений амплитуды в функцию пространственной неопределенности, по положению максимума которой определяют местоположение источника. Однако указанные аналоги имеют недостатки. Первый способ применяют только тогда, когда наблюдают доплеровский сдвиг несущей частоты, который можно измерить. Второй способ применяют при наличии не менее двух периферийных пунктов контроля.
Наиболее близким по технической сущности к заявляемому изобретению (прототипом) является способ радиопеленгации земных станций (См. «Спутниковая связь и вещание 2009», Г.Верзунов, П.Корвяков, В.Могучев «Радиопеленгация земных станций» с.98-102, опубл. в 2009 г.). Известный способ заключается в том, что местоположение «пиратской» станции определяют путем измерения множества дифференциальных наклонных дальностей до нескольких эфемерид одного или нескольких спутников с известными координатами и засечки общей искомой точки пересечения гиперболических поверхностей в пространстве. Данный способ выбран в качестве способа-прототипа. Недостатком способа-прототипа является сложность реализации, а именно необходимость наличия одноканального дальномерного и многоканального дальномерно-разностного модемов для измерений наклонной и дифференциальной дальностей, а также группы земных станций, входящих в систему мониторинга.
Задачей изобретения является создание способа определения местоположения VSAT-станции в спутниковой сети одним пунктом контроля, обеспечивающего простоту реализации определения местоположения станции за счет комплексного анализа служебной, технической информации, циркулирующей в спутниковой сети, реализующей режим TDMA (MF-TDMA), а также учитывающего изменение значений временных задержек в сети перемещенной «пиратской» VSAT-станции и в связи с нестабильностью местоположения геостационарного ИСЗ на орбите.
Эта задача решается тем, что в способе определения местоположения VSAT-станции в спутниковой сети, заключающемся в том, что на станции радиомониторинга контролируют служебную и техническую информацию, циркулирующую в спутниковой сети, определяют значения временных задержек, применяемых с целью обеспечения работоспособности сети в условиях территориального разнесения телекоммуникационных устройств и учета нестабильности местоположения спутника на геоорбите, рассчитывают дальности до нескольких эфемерид одного спутника и определяют координаты перемещенной «пиратской» VSAT-станции как точку пересечения сферических поверхностей в пространстве.
Сети связи VSAT разрабатывают, как правило, для функционирования через геостационарные искусственные спутники Земли (ИСЗ). Однако геостационарные спутники не являются космическими объектами, стационарно находящимися на геоорбите. Ввиду влияния Луны, других небесных объектов, неточностью выведения спутника на орбиту ИСЗ дрейфует относительно определенной подспутниковой точки. Несмотря на незначительное абсолютное значение дрейфа спутника на геоорбите (±1°), это приводит к временным задержкам сигнала на линии связи центральная земная станция (ЦЗС) - спутник (до -120 мкс).
Оператор связи при проектировании и эксплуатации системы связи VSAT учитывает данное положение дел. Для чего в системе предусматривают механизм коррекции временных задержек, вызванных дрейфом искусственного спутника Земли относительно подспутниковой точки.
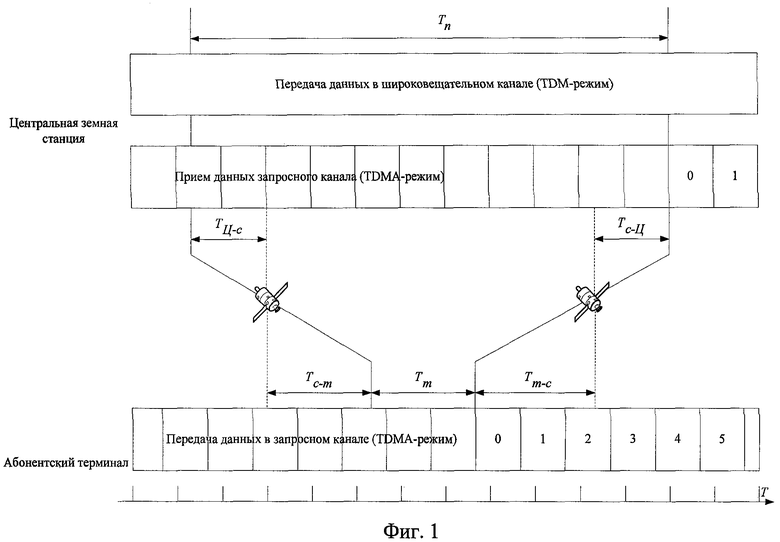
Общее выражение задержек, наблюдаемых в процессе функционирования сети, определяется выражением

где Tn - время между передачей пакета ЦЗС и началом приема пакета центральной земной станцией от удаленного терминала;
ТЦ-с-Ц - время передачи пакета от ЦЗС до спутника и обратно;
Тm - время между приемом пакета на удаленном терминале и началом передачи пакета от терминала;
Тm-c-m - время передачи пакета от удаленного терминала до спутника и обратно.
Удаленные терминалы передают пакеты в определенные им временные интервалы с погрешностью не более ±10 мкс, только в этом случае на центральную земную станцию пакеты от разных терминальных устройств приходят без взаимного влияния друг на друга. Центральная земная станция, имея в своем составе точный источник временной синхронизации, корректирует менее точные генераторы удаленных терминалов, благодаря передаче параметров временной коррекции с учетом дрейфа ИСЗ.
Для решения задачи местоопределения рассчитывают протяженность радиотрасс ЦЗС - спутник, терминал - спутник, используя значения временных задержек, передаваемых в сети. Решение задачи требует до трех источников излучений и соответствующих им дальностей от источников до определяемого объекта. Дополнительные данные получают благодаря передаче в системе параметров временной коррекции с учетом дрейфа ИСЗ.
Математически данную задачу определяют как решение системы из трех нелинейных уравнений с тремя переменными
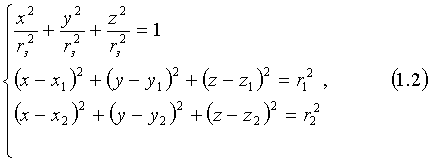
Первым уравнением системы (1.2) определяют сферу, являющуюся моделью Земли, где x, y, z - координаты точек сферы в прямоугольной системе координат; rЗ - радиус Земного шара.
Второе и третье уравнения системы (1.2) определяют пространственные сферы, где x, y, z - координаты точки сферы в прямоугольной системе координат; xn, yn, xn - координаты центра n-й сферы; rn - радиус n-й сферы, который определяют как

где tn - время распространение сигнала на радиотрассе;
c - скорость распространения радиоволны.
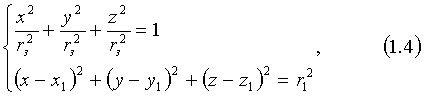
Решение системы нелинейных уравнений (1.2) реализуют заменой системы из трех уравнений двумя системами из двух уравнений (1.4) и (1.5):
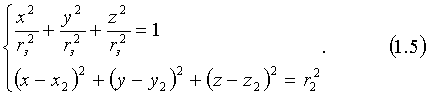
Переход от переменной z к {zi} приводит систему двух нелинейных уравнений с тремя переменными к множеству {i} систем двух нелинейных уравнений с двумя переменными вида:

где х2+у2=R2(zi) - выражение окружности, являющейся проекцией от земной сферы на уровне zi на плоскость OXY;
(х-х1)2+(y-y1)2=R1 2(zi) - выражение окружности, являющейся проекцией от пространственной сферы на уровне zi, на плоскость OXY;
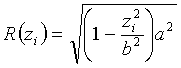 - радиус окружности, являющейся проекцией от земной сферы на уровне zi на плоскость OXY;
- радиус окружности, являющейся проекцией от земной сферы на уровне zi на плоскость OXY;
 - радиус окружности, являющейся проекцией от пространственной сферы на уровне zi на плоскость OXY.
- радиус окружности, являющейся проекцией от пространственной сферы на уровне zi на плоскость OXY.
Решение системы уравнений (1.6) для слоя zi, при i∈[0; b], есть решение для систем (1.4) и (1.5). В результате решения получают множество значений {x1, y1} и {x2, y2}. Общие значения во множествах {x1, y1} и {х2, y2} слоя zi есть решение системы нелинейных уравнений (1.2).
Так как величина z дискретная с шагом дискретизации Δz, то {x1, y1} и {x2, y2}i - приближенные решения системы нелинейных уравнений (1.2).
Итерационные методы вычисления точного значения корня z уравнения f(x)=0 обычно требуют указания какой-либо области D (желательно малой), локализующей z. Следовательно, вычисление истинных значений решения системы нелинейных уравнений (1.2) получают за счет поэтапной локализации и уменьшения области определения z при устремлении Δz→0.
Число этапов локализации и уменьшений области z повторяют до получения задаваемой точности решения системы из трех нелинейных уравнений с тремя переменными (1.2).
Координаты (x, y, z) станции рассчитывают в геоцентрической прямоугольной системе координат. Для перехода из геоцентрической прямоугольной системы координат в сферическую с целью выражения координат станции в угловых координатах широта и долгота (φ, λ) используют выражения перехода из одной системы координат в другую:



где H - высота поверхности над уровнем моря.
Сопоставительный анализ заявляемого решения с прототипом показывает, что предлагаемый способ отличается от известного за счет комплексного анализа служебной, технической информации, циркулирующей в спутниковой сети, реализующей режим TDMA (MF-TDMA), использования результатов коррекции временных задержек, вызванных дрейфом искусственного спутника Земли относительно подспутниковой точки, для вычисления значений дальностей для нескольких эфемерид спутника и решение системы нелинейных уравнений методом поэтапного снижения разрядности систем уравнений с уменьшением числа переменных в уравнениях, приводя систему к виду, который решается с использованием метода простой итерации.
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного объекта, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность отличительных существенных признаков, обусловливающих тот же технический результат, который достигнут в заявляемом способе. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Основой достижения положительного эффекта является использование особенностей и введение новых операций, выполняемых над сигналами при дальномерном способе определения местоположения станции, а именно анализе и обработке технической информации, меняющейся в зависимости от коррекции временных задержек, вызванных изменением местоположения «пиратской» VSAT-станции и дрейфом искусственного спутника Земли относительно подспутниковой точки. Неоднократная реализация операций анализа и обработки при различных значениях дрейфа ИСЗ обеспечивает однозначность определения местоположения станции.
Благодаря новой совокупности существенных признаков в способе реализована возможность промышленной реализации определения местоположения станции за счет комплексного анализа служебной, технической информации, содержащей данные о коррекции временных задержек, вызванных изменением местоположения «пиратской» VSAT-станции и дрейфом ИСЗ на геоорбите, что обусловлено применением устройства контроля временных задержек терминальных устройств в спутниковой телекоммуникационной сети, выполненного на основе микропроцессоров с соответствующим специализированным программным обеспечением.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленного способа условию патентоспособности «новизна».
Заявленный способ поясняется чертежами, на которых показано:
фиг.1 - временные диаграммы, поясняющие механизма коррекции временных задержек, вызванных дрейфом искусственного спутника Земли относительно подспутниковой точки;
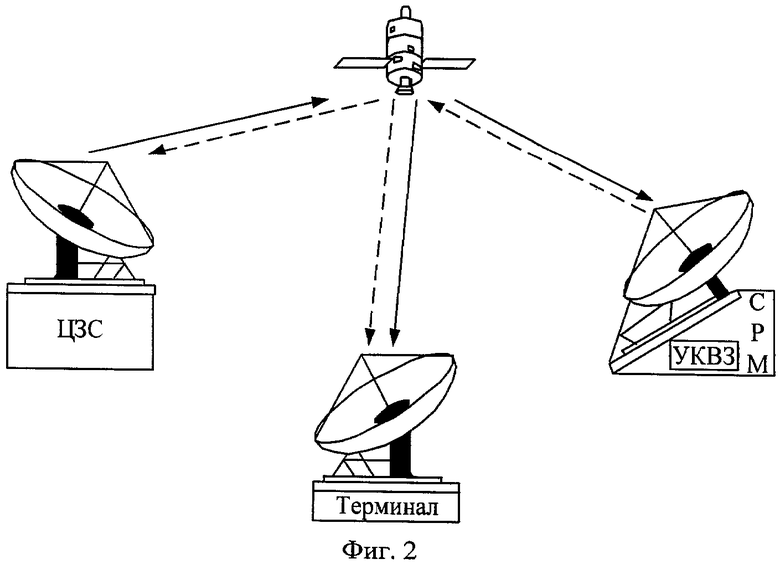
фиг.2 - архитектура системы определения местоположения VSAT-станции в спутниковой сети;
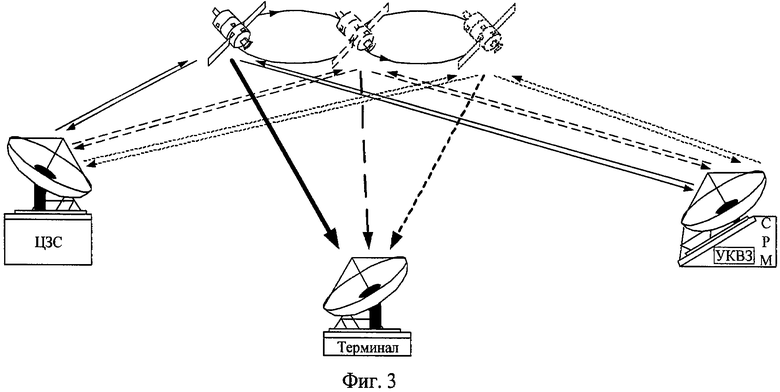
фиг.3 - способ определения местоположения VSAT-станции в спутниковой сети.
Возможность реализации заявленного способа объясняется следующим. Определение местоположения перемещенной VSAT-станции в спутниковой сети основывается на использовании результатов коррекции временных задержек, вызванных дрейфом искусственного спутника Земли относительно подспутниковой точки. Временные задержки для каждого терминального устройства индивидуальны и различны, при этом изменяются в зависимости от положения ИСЗ во время дрейфа на геоорбите и местоположения VSAT-станции на земной поверхности.
На фиг.1 представлены временные диаграммы, поясняющие механизма коррекции временных задержек, вызванных дрейфом искусственного спутника Земли относительно подспутниковой точки.
На фиг.2 изображена архитектура системы определения местоположения VSAT-станции в спутниковой сети, которая включает: элементы VSAT-сети (центральная земная станция, ИСЗ, терминал) и станцию радиомониторинга (СРМ) «пиратских» VSAT-станций, содержащую в своем составе устройство контроля временных задержек (УКВЗ) терминальных устройств в спутниковой телекоммуникационной сети.
На станции радиомониторинга контролируют временные задержки, передаваемые в сети для удаленных терминалов. Используя значения временных задержек и. выражения (1.1) и (1.3), рассчитывают протяженность радиотрасс: ЦЗС - спутник, спутник - удаленный терминал. Для успешного решения задачи местоопределения VSAT-станции требуется три значения дальностей от источника (ИСЗ) до определяемого объекта (терминала). Дополнительные измерения получают благодаря нестабильности местоположения (дрейфа) спутника на геоорбите (фиг.3).
Контролируя изменение значений временных задержек на интервале наблюдения, на СРМ рассчитывают дополнительные значения дальностей до терминалов в зависимости от изменения положения ИСЗ на геоорбите. Координаты станции являются координатами точки пересечения воображаемых сфер (с центрами в точках положения ИСЗ и радиусами, представляющими дальности от источника (ИСЗ) до определяемого объекта (терминала)) с поверхностью Земли. Для получения точки пересечения достаточно две сферы и сферы, являющейся пространственной моделью Земли. Для устранения неоднозначности (наличие точек пересечения в северном и южном полушариях) необходима третья сфера. Конкретизация точки пересечения сфер со сферой Земли математически может рассматриваться как повторение операции поиска точки пересечения сферы со сферой Земли. Математически данную задачу решают как систему из трех нелинейных уравнений с тремя переменными (1.2).
Решение системы нелинейных уравнений реализуют методом поэтапного снижения разрядности систем уравнений с уменьшением числа переменных в уравнениях, приводя систему к виду, который решается с использованием метода простой итерации.
Полученное решение определяет координату станции в геоцентрической прямоугольной системе координат, значение которой пересчитывают в угловые координаты сферической системы.
Работоспособность предлагаемого способа проверена экспериментально. Макет станции радиомониторинга «пиратских» VSAT-станций, содержащий в своем составе тракт радиоприема сигналов VSAT-станций, устройство контроля временных задержек терминальных устройств в спутниковой телекоммуникационной сети, выполненного на основе микропроцессоров с соответствующим специализированным программным обеспечением, компьютерный сервер (профессиональный персональный компьютер) обработки результатов контроля и пакет специального программно-математического обеспечения для обработки данных, реализует способ определения местоположения VSAT-станции в спутниковой сети. Результаты получены для следующих основных исходных данных: измерения по трем позициям эфемерид одиночного спутника, нестабильность позиции ИСЗ по долготе и наклонению ±0,5°, точность определения временных задержек ±1 мкс. Алгоритмическая ошибка определения местоположения VSAT-станции не превышает 2,5 км и определяется расхождением геодезических координат на поверхности Земли с координатами на поверхности принятой модели земного шара, которая минимизируется при использовании в качестве модели Земли эллипсоида вращения. Точность определения местоположения VSAT-станции составила ±(1,5…3) км. Длительность процедуры определения местоположения определяется, главным образом, затратами на измерения трех временных задержек, значения которых изменяются в зависимости от дрейфа спутника на геоорбите, и составила несколько часов. Эффективность изобретения выражается в обеспечении однозначного определения местоположения «пиратской» VSAT-станции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТАНЦИИ СЕТИ СВЯЗИ VSAT | 2016 |
|
RU2606958C1 |
| УСТРОЙСТВО И СПОСОБ СПУТНИКОВОГО РАДИООПРЕДЕЛЕНИЯ | 1996 |
|
RU2181490C2 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СТАНЦИЯ РАДИОМОНИТОРИНГА СИГНАЛОВ ГЕОСТАЦИОНАРНЫХ СПУТНИКОВЫХ СИСТЕМ | 2014 |
|
RU2573593C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОГО ТЕРМИНАЛА С ПОМОЩЬЮ НЕ МЕНЕЕ ДВУХ СПУТНИКОВ-РЕТРАНСЛЯТОРОВ НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 2017 |
|
RU2684740C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЛЬЗОВАТЕЛЬСКОГО ТЕРМИНАЛА С ИСПОЛЬЗОВАНИЕМ ДВУХ СПУТНИКОВ-РЕТРАНСЛЯТОРОВ | 2015 |
|
RU2605457C1 |
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ С ПОМОЩЬЮ ОДНОГО СПУТНИКА НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 1997 |
|
RU2241239C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ С ПОМОЩЬЮ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ | 1992 |
|
RU2092355C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НЕИЗВЕСТНОГО ПЕРЕДАТЧИКА В СИСТЕМЕ СПУТНИКОВОЙ СВЯЗИ | 2003 |
|
RU2254589C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ С ИСПОЛЬЗОВАНИЕМ ПРИЕМО-ПЕРЕДАЮЩИХ ОПОРНЫХ РЕПЕРНЫХ СТАНЦИЙ | 2018 |
|
RU2708883C1 |
Изобретение может быть использовано в радиопеленгации для определения местоположения VSAT-станции в спутниковой сети. Достигаемый технический результат - создание способа определения местоположения перемещенной «пиратской» VSAT-станции в спутниковой сети одним пунктом контроля, обеспечивающего простоту реализации определения местоположения станции за счет комплексного анализа служебной, технической информации, циркулирующей в спутниковой сети, реализующей режим TDMA (MF-TDMA), а также учитывающего изменения значений временных задержек в сети в связи с нестабильностью местоположения геостационарного ИСЗ на орбите. Указанный результат достигается за счет того, что в способе определения местоположения VSAT-станции в спутниковой сети, заключающемся в том, что измеряют множество значений дифференциальных наклонных дальностей до нескольких эфемерид одного или нескольких спутников с известными координатами одноканальным дальномерным и многоканальным дальномерно-разностным модемами и определяют общую искомую точку пересечения гиперболических поверхностей в пространстве, дополнительно контролируют служебную и техническую информацию, циркулирующую в спутниковой сети, определяют временные задержки, используемые с целью обеспечения работоспособности сети в условиях территориального разнесения телекоммуникационных устройств и учета нестабильности местоположения спутника на геоорбите, рассчитывают дальности до нескольких эфемерид одного спутника и определяют координаты перемещенной «пиратской» VSAT-станции как точку пересечения сферических поверхностей в пространстве, решая систему нелинейных уравнений методом поэтапного снижения разрядности систем уравнений и уменьшения числа переменных в уравнениях, приводя к виду решения с использованием метода простой итерации. 3 ил.
Способ определения местоположения VSAT-станции в спутниковой сети, отличающийся тем, что на станции радиомониторинга контролируют служебную и техническую информации, циркулирующие в пакетах в VSAT-сети, которая содержит значения временных задержек начал передачи пакетов с данными от VSAT-станций, применяемых в VSAT-сети в условиях территориального разнесения VSAT-станций и нестабильности местоположения спутника на геоорбите, приводящих к изменениям дальностей от VSAT-станций до спутника на геоорбите, а следовательно, значений временных задержек, на основе значений временных задержек в различные моменты времени рассчитывают дальности от VSAT-станции до нескольких эфемерид спутника на геоорбите и определяют координаты VSAT-станции как точку пересечения сферических поверхностей с центрами в значениях эфемерид спутника на геоорбите и радиусами, равными дальностям от VSAT-станции до эфемериды спутника на геоорбите с земной поверхностью, используя для этого решение системы нелинейных уравнений второго порядка.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2292560C1 |
| СИСТЕМА ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2387080C1 |
| СИСТЕМА БЕСПРОВОДНОЙ СВЯЗИ, УСТРОЙСТВО И СПОСОБ ДЛЯ ПРЕДОТВРАЩЕНИЯ ЗЛОУМЫШЛЕННОГО ИСПОЛЬЗОВАНИЯ БЕСПРОВОДНОГО ТЕРМИНАЛА | 1996 |
|
RU2168871C2 |
| RU 97103571 A, 04.1999 | |||
| US 6256496 B1, 03.07.2001 | |||
| US 5659487 A, 19.08.1997 | |||
| JP 2002057720 A, 22.02.2002. | |||

