Изобретение относится к области приборостроения и может быть использовано при создании инерциальных навигационных систем.
Известна инерциальная навигационная система, содержащая бортовой вычислитель с данными о начальных параметрах поступательного и углового движения объекта, о параметрах гравитационного поля и базового вращения, датчики поступательного и углового движения.
Наиболее близкой по технической сущности является навигационная система, содержащая одностепенную платформу и вычислительный блок, а также установленные на платформе датчик поступательного и углового движения, однако данная система не обладает достаточной надежностью.
Целью предлагаемого изобретения является повышение надежности за счет уменьшения количества датчиков.
Поставленная цель достигается тем, что в инерциальную навигационную систему введен коммутатор, установленный вдоль оси вращения платформы, входы которого подключены к выходам датчиков, а выход соединен с входом вычислительного блока, причем измерительные оси обоих датчиков составляют с осью вращения платформы угол, величина которого определяется зависимостью:
γ=arcsin
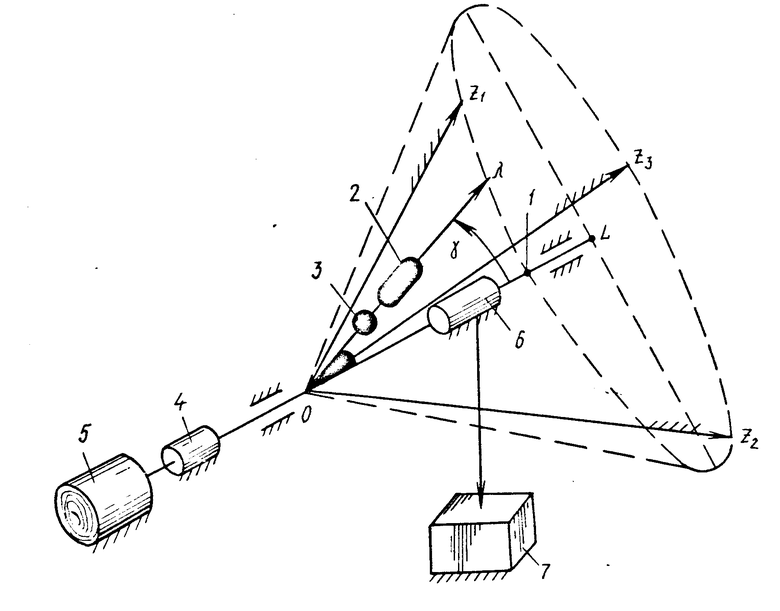
На чертеже приведена функциональная блок-схема устройства, где приняты следующие обозначения: 1 ось, 2 датчик поступательного движения; 3 датчик углового движения; 4 редуктор; 5 двигатель; 6 коммутатор; 7 бортовое вычислительное устройство.
На объекте, условно показанном на чертеже штриховкой, фиксирован ортогональный трехгранник OZ1Z2Z3. По высоте конуса, описанного около трехгранника OZ1Z2Z3, установлена на объекте ось 1, на которой укреплены датчик поступательного движения 2 и датчик углового движения 3 так, что их измерительная ось О λ образует с осью 1 угол γ arcsin  54о44'. Ось 1 через ре- дуктор 4 соединена с двигателем 5. на оси 1 установлен коммутатор 6, предназначенный для съема сигналов датчиков 2, 3 в окрестностях осей Z1, Z2, Z3. Выход коммутатора 6 подключен к входу бортового вычислительного устройства 7.
54о44'. Ось 1 через ре- дуктор 4 соединена с двигателем 5. на оси 1 установлен коммутатор 6, предназначенный для съема сигналов датчиков 2, 3 в окрестностях осей Z1, Z2, Z3. Выход коммутатора 6 подключен к входу бортового вычислительного устройства 7.
В течение времени навигационных измерений двигатель 5 через редуктор 4 вращает ось 1 с угловой скоростью ω. При этом вращении оси 1 измерительная ось O λ датчиков 2, 3 совершает движение относительно объекта по поверхности конуса, описанного около координатного трехгранника OZ1Z2Z3. При прохождении измерительной осью O λ окрестностей координатных осей Z1, Z2, Z3 коммутатор 6 посылает сигналы датчиков в бортовое вычислительное устройство 7, в котором эти сигналы обрабатываются с целью вычисления текущих значений параметров поступательного и углового движения объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2257547C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2169903C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
| Трехкомпонентный измеритель угловой скорости | 2023 |
|
RU2803452C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1991 |
|
RU2046289C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОСИ ЧУВСТВИТЕЛЬНОСТИ ГРАВИМЕТРА, УСТАНОВЛЕННОГО НА ЛЕТАТЕЛЬНОМ АППАРАТЕ, ПРИ ЕГО ДИСТАНЦИОННОЙ ВЫСТАВКЕ ПО ЛИНИИ ОТВЕСА | 2001 |
|
RU2221990C2 |
| СПОСОБ ФОРМИРОВАНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ МАНЕВРЕННОГО ОБЪЕКТА | 2019 |
|
RU2713585C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1997 |
|
RU2126136C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| Инерциальный навигационный комплекс для высокоскоростного маневренного объекта | 2016 |
|
RU2657293C1 |
ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА, содержащая одностепенную платформу, механически соединенную через редуктор с двигателем и вычислительный блок, а также установленные на платформе датчики поступательного и углового движения, отличающаяся тем, что, с целью повышения надежности за счет уменьшения количества датчиков, в нее введен коммутатор, установленный вдоль оси вращения платформы, входы которого подключены к выходам датчиков, а выход соединен с входом вычислительного блока, причем измерительные оси обоих датчиков составляют с осью вращения платформы угол, величина которого определяется зависимостью
| Андреев В.А | |||
| Теория инерциальной навигации | |||
| Автономные системы | |||
| М.: Наука, 1966, с.117. |
