Настоящее техническое решение относится к области машиностроения. Рабочие органы такого типа используются для создания промышленных роботов повышенной гибкости. Например, робот на покраске внутренних поверхностей автомобиля. Кроме того, подобная кинематическая схема может быть использована для гибкого крепления наводящихся систем, антенн, различных излучателей и телекамер.
Из известных заявителю устройств наиболее близким является промышленный манипулятор типа SRINE, описанный на страницах 26-27, книги издательства «МИР» «Не счесть у робота профессий», Москва, перевод 1987 г., под редакцией П.Марша.
Манипулятор-прототип представляет собой набор чечевицеобразных элементов, расположенных последовательно и связанных гибкими связями.
Однако манипуляторы такого типа обладают рядом недостатков:
1. Нагруженная рабочая зона элементов представляет собой точку малой площади, из-за чего нагрузка распределена неравномерно, и элементы работают неэффективно. В результате их можно изготовить только из очень прочных материалов, которые имеют большой собственный вес и все равно быстро изнашиваются.
2. Элементы под нагрузкой проскальзывают, что не позволяет достичь большой точности позиционирования.
3. Конструкция не обладает достаточной прочностью на кручение, так как принципиально отсутствуют фиксирующие элементы. Это не позволяет использовать манипулятор для работы с деталями и оборудованием большого и среднего веса.
4. При работе слишком велика сила трения тросов об элементы, что повышает энергозатраты и приводит к быстрому износу гибких связей.
Целью настоящего изобретения является исключение указанных недостатков: снижение нагруженности элементов, снижение общего веса и удешевление конструкции за счет применения менее прочных материалов. Исключение проскальзывания для повышения точности позиционирования. Увеличение устойчивости к кручению. Увеличение надежности и уменьшение энергозатрат за счет снижения трения.
Эта цель достигается путем оптимизации формы рабочих элементов, которые выполнены в виде усеченных сегментов цилиндра. Рабочая поверхность элементов снабжена поперечными зубьями, на боковых плоскостях установлены ограничители, взаимно смещенные относительно центра, а на нерабочей плоскости сделан паз для взаимного крепления элементов. Гибкие связи расположены между направляющими роликами, установленными в пазах, сделанных в торцах рабочих элементов.
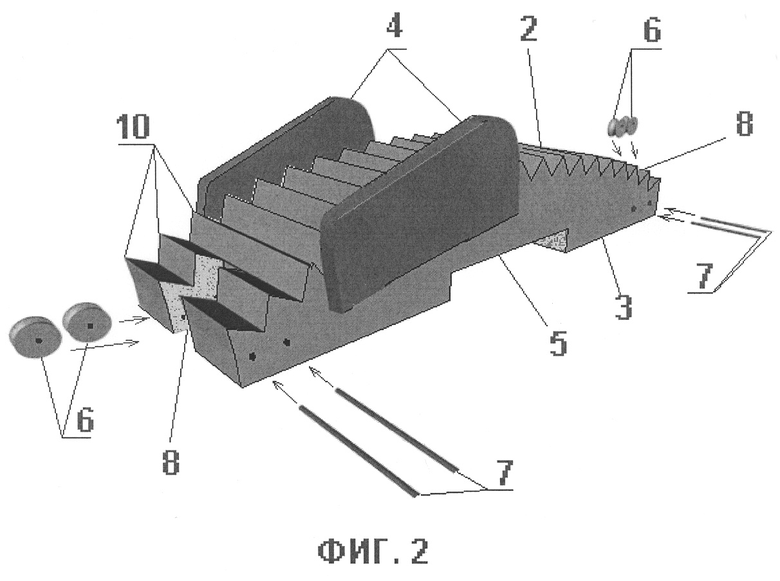
Суть изобретения поясняется чертежами, где на фигуре 1 изображена кинематическая схема манипулятора с двумя степенями свободы, а на фигуре 2 показано устройство отдельного элемента.
Устройство состоит из рабочих элементов 1 с рабочей 2 и нерабочей 3 поверхностями, ограничителями бокового смещения 4, крепежного паза 5 на нерабочей поверхности, направляющих роликов 6, установленных на осях 7 в пазах 8 на торцах элементов, и гибких связей 9. Рабочая поверхность снабжена зубьями 10.
Манипулятор устроен следующим образом.
Последовательно установленные крест-накрест элементы 1 скрепляются гибкими связями 9, которые пропускаются через направляющие ролики 6 и закрепляются на конечном элементе манипулятора. Элементы при сборке попарно соединяются крепежными пазами и устанавливаются друг на друга с разворотом ограничителей в противоположные стороны.
Гибкий элемент, при помощи, например, обычной лебедки, натягивается с одной стороны, одновременно отпускаясь с противоположной, что приводит к изгибу манипулятора в сторону уменьшающегося элемента. Меняя порядок сборки манипулятора, можно построить систему с одной степенью свободы или с двумя, а увеличивая количество роликов, гибких связей и высоту их крепления - делать многозвенные манипуляторы различного назначения.
Изменение радиуса кривизны рабочих поверхностей или использование поверхностей с переменным радиусом позволяет менять динамические характеристики отдельных элементов и соответствующих участков манипулятора.
На этом принципе можно разработать манипуляторы промышленных роботов, используемых на покраске, сварке и сборке автомобилей или радиотехнических устройств. Кроме того, можно использовать манипулятор для гибкого крепления наводящихся антенн, телекамер слежения и направленных излучателей.
Данная конструкция устройства резко уменьшает нагруженность элементов манипулятора за счет того, что рабочие области элементов теперь имеют не форму точки, как в прототипе, а прямую линию размером во всю ширину элемента, а при применении, например, зубьев даже принимают вид плоскости. Это дает возможность изготавливать элементы из менее прочных материалов, уменьшить вес манипулятора при одновременном улучшении эксплуатационных показателей.
Зубчатая поверхность, ограничители и крепежный паз исключают возможность взаимного проскальзывания элементов, что существенно повышает точность позиционирования и нагрузочную способность манипулятора. А направляющие ролики снижают потери на трение и уменьшают износ гибких связей.
Кроме того, устройство очень технологично, фактически элементы можно изготавливать путем нарезки их из длинного профиля соответствующей формы. После чего достаточно прорезать пазы и просверлить отверстия для осей роликов и крепления боковых ограничителей. Резкое снижение нагруженности элементов позволяет изготавливать их из пластмасс с использованием технологии литья под давлением.
Предложенная конструкция обладает большой жесткостью за счет исключения взаимного проскальзывания элементов, устойчивостью к скручиванию. Это позволяет увеличить точность позиционирования. Увеличение рабочей поверхности элементов, позволяет увеличить допустимую нагрузку при одновременном снижении веса, стоимости и износа, что позволяет расширить зону возможных применений манипулятора. Так, например, теперь его можно применить в роботах, работающих с более тяжелыми и несбалансированными деталями или использовать в качестве гибкого крепежного элемента для систем наведения.
Из известных заявителю патентно-информационных материалов не обнаружены признаки, сходные с отличительными признаками заявляемого объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный робот | 1988 |
|
SU1662834A1 |
| МЕХАНИЧЕСКОЕ НАВОДЯЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2439724C1 |
| Электромеханический модульный сустав манипулятора | 1986 |
|
SU1371906A1 |
| Мобильный робот | 2023 |
|
RU2824025C1 |
| ЭЛЕМЕНТ КАЧЕНИЯ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2010 |
|
RU2425263C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МАНИПУЛЯТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2720841C1 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПРУЖИНЫ | 2001 |
|
RU2200886C2 |
| ПЕРЕДАЧА С ПРОМЕЖУТОЧНЫМИ ЗВЕНЬЯМИ | 1996 |
|
RU2165552C2 |
| ШТАТИВ ДЛЯ УСТАНОВКИ ОБОРУДОВАНИЯ НАБЛЮДЕНИЯ | 2013 |
|
RU2558508C2 |
Изобретение относится к области машиностроения и может быть использовано при создании промышленных роботов повышенной гибкости и, кроме того, для гибкого крепления наводящихся систем, антенн, различных излучателей и телекамер. Сущность изобретения заключается в том, что рабочие элементы манипулятора выполнены в виде усеченных сегментов цилиндра. Кроме того, рабочие элементы имеют рабочую поверхность с поперечными зубьями, ограничители бокового смещения и крепежный паз. Гибкие элементы расположены между направляющими роликами, установленными в пазах, на торцах рабочих элементов, а рабочая поверхность элементов имеет переменный радиус кривизны. Технический результат изобретения состоит в улучшении технических и эксплуатационных характеристик, повышении надежности, а также снижении массы и удешевлении манипулятора. 5 з.п. ф-лы, 2 ил.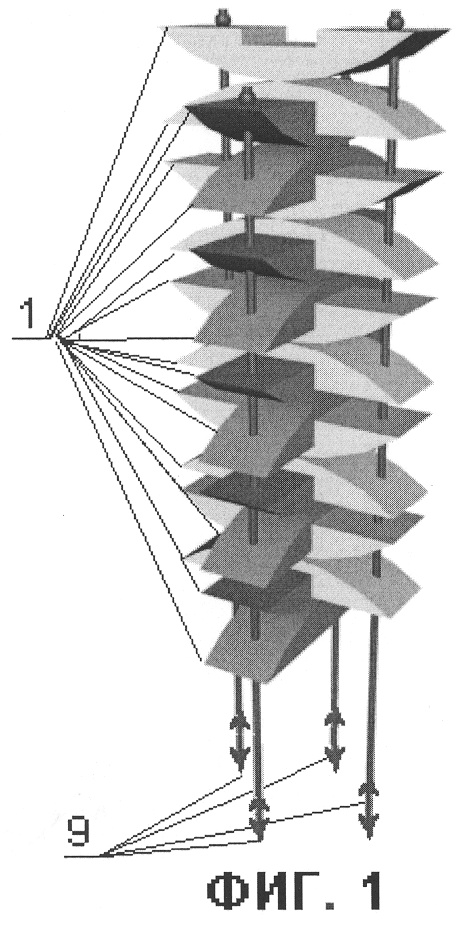
| Не счесть у робота профессий | |||
| Под ред | |||
| П.МАРША | |||
| - М.: Мир, 1987, с.26-27 | |||
| Манипулятор | 1986 |
|
SU1351782A1 |
| Исполнительный орган манипулятора | 1986 |
|
SU1323364A1 |
| Устройство для плавного поворота и стопорения створки | 1984 |
|
SU1266949A1 |
| DE 19719931 A1, 01.10.1998. | |||

