Изобретение относится к робототехнике, а именно к мобильным роботам робототехнических комплексов, предназначенных для исследования территорий производственных и муниципальных структур и передачи результатов исследования для дальнейшей обработки оператором.
Известен мобильный робот воздухоплавательного типа (патент на изобретение Российской Федерации МПК И64С 27/08 RU №2018145055 С1, Бюл. №35 от 13.12.2019). Патент №2709083, содержащий каркас с размещенными на нем электродвигателями с автоматами перекоса винтов, системой управления с гироскопом и радиоэлектронной аппаратурой, гибкую тягу в виде силового, энергетического и информационного кабеля. При этом каркас снизу снабжен плоским чехлом, а сверху - сферическим чехлом, имеющим аэродинамический профиль, причем сферический чехол заполнен неэластичным пористым материалом. Обеспечивается упрощение технологии изготовления и уменьшение веса конструкции.
Названный аналог не позволяет осуществлять исследования в малых пространствах ввиду невозможности обеспечения полета на сверхмалой высоте.
Наиболее близким аналогом является мобильный робот, входящий в состав мобильного робототехнического комплекса по патенту МПК B25J 5/00, RU №2364500 С2, Бюл. №23 от 20.08.2009. Владелец патента открытое акционерное общество «КОВРОВ СКИЙ
ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЗАВОД» (ОАО «КЭМЗ») (RU). Изобретение относится к робототехнике, а именно к робототехническим комплексам, предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах. Мобильный робототехнический комплекс включает мобильный робот, пост дистанционного управления, бортовую телевизионную систему, которая включает отдельные видеоблоки.
Мобильный робототехнический комплекс снабжен выносной системой видеонаблюдения. Мобильный робот дополнительно включает комплект дополнительного оборудования - раздвижную телескопическую штангу-удлинитель, с узлом вертикального крепления ее в кормовой части транспортного средства мобильного робота на одном конце и узлом крепления привода наведения видеоблока, выполняющего обзорные функции, на другом конце.
При этом мобильный робот включает в себя двигатель с приводом, установленный на оси, направляющий элемент, средства питания, управления, и информационного обеспечения, а также раму.
Как следует из описания, названный аналог не позволяет осуществлять гибкое конфигурирование системы, что в свою очередь ведет к невозможности осуществления расширения функциональных возможностей.
Изобретение направлено на улучшение эксплуатационных характеристик, расширения функциональных возможностей мобильного робота и удешевление конфигурации рамы.
Это достигается тем, что мобильный робот содержит двигатель с приводом, установленный на оси, направляющий элемент, средства питания, управления, и информационного обеспечения, а также раму, согласно изобретению рама выполнена в виде швеллеров, соединенных уступами вдоль боковых сторон, при этом первый крайний швеллер соединен с осью двигателя с приводом, а на втором крайнем швеллере установлен направляющий элемент.
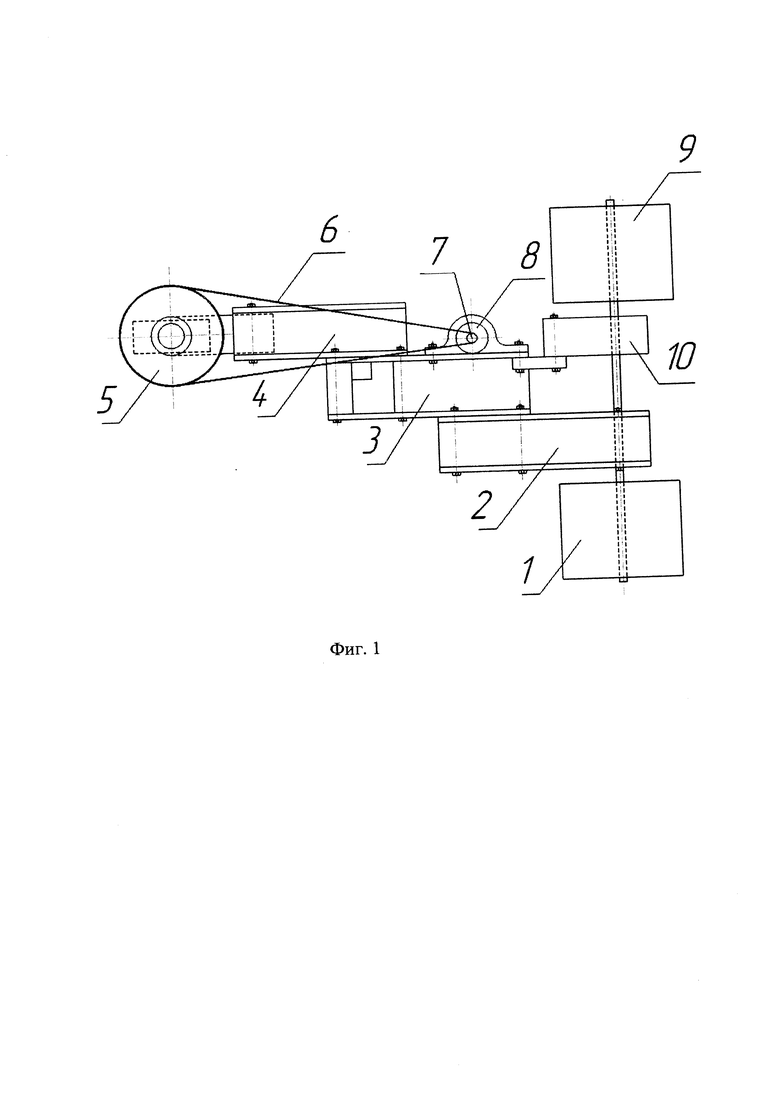
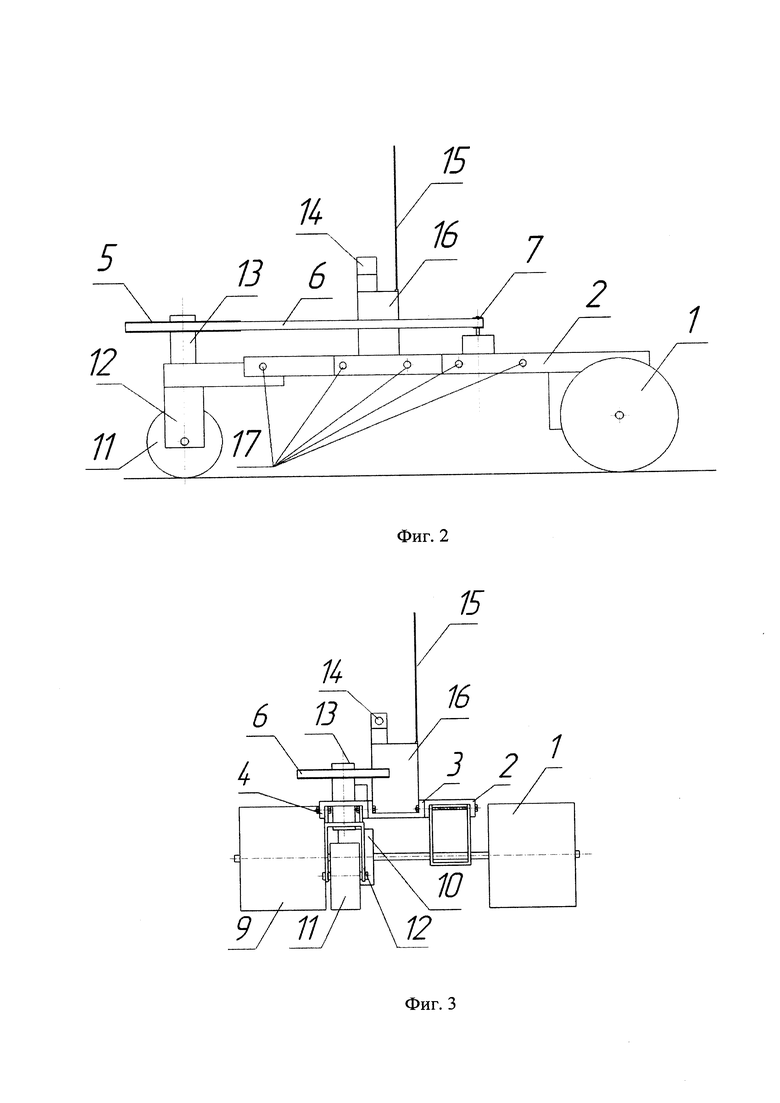
Конструкция робота по предлагаемому изобретению поясняется следующими чертежами, где на фиг.1 показан мобильный робот вид сверху, на фиг.2 показан мобильный робот вид сбоку, на фиг.3 мобильный робот вид спереди.
Робот включает в себя боковое колесо 1, первый крайний швеллер 2, соединенный с осью двигателя с приводом, средний швеллер 3, второй крайний швеллер 4. Швеллеры соединены уступом вдоль боковых сторон. На втором крайнем швеллере установлен направляющий элемент, имеющий вертикальную ось со шкивом 5, который через гибкий элемент 6 соединен со шкивом 7 двигателя 8, направляющего элемента. Тяговое колесо 9 приводится в движение двигателем с редуктором 10. Направляющим элементом является колесо 11 с вилкой 12 и вертикальной осью 13. На раме может быть установлено информационное оборудование, включающее в себя, например телекамеру 14, антенну 15, блок управления с манипуляторами 16. Швеллеры соединены уступом вдоль боковых сторон с помощью крепежных элементов болтов 17.
Мобильный робот функционирует следующим образом. Вначале оператор дает дистанционную команду с пульта управления для начала работы мобильного робота. Далее производится самодиагностика всех модулей робота и по беспроводному интерфейсу данные выводятся на экран оператору. При получении команды вперед, воспринимаемой антенной 15, привод 10 приводит во вращение колесо 9, робот начинает движение. Устойчивому состоянию способствует колесо 1. При изменении направления движения команда подается на двигатель 8, который через шкивы 5 и 7 и гибкий элемент 6 осуществляет поворот оси 13, а, следовательно, и поворот колеса 11.
Технико-экономическим преимуществом является введение в состав рамы робота швеллеров, что резко удешевляет конструкцию и, в тоже время дает возможность установки на него различного оборудования, как по длине, так и по ширине рамы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот мобильный | 2024 |
|
RU2841232C1 |
| Мобильный робот | 2024 |
|
RU2841236C1 |
| Робот мобильный | 2024 |
|
RU2839641C1 |
| Информационный мобильный робот | 2024 |
|
RU2837077C1 |
| Мобильный робот | 2024 |
|
RU2841234C1 |
| Мобильный информационный робот | 2024 |
|
RU2839879C1 |
| Информационный мобильный робот | 2024 |
|
RU2839732C1 |
| Колесо мобильного робота | 2024 |
|
RU2835523C1 |
| Робот мобильный | 2024 |
|
RU2834078C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
Изобретение относится к области робототехники и может быть использовано в конструкциях мобильных роботов, предназначенных для исследования территорий производственных и муниципальных структур. Мобильный робот содержит раму, снабженную тяговым колесом, связанным с приводом его вращения, боковым колесом и направляющим колесом, установленным на поворотной оси, средства питания, управления и информационного обеспечения, размещенные на раме. При этом рама выполнена в виде швеллеров, соединенных друг с другом своими боковыми сторонами уступами, образованными выдвижением крайних швеллеров в разные стороны относительно среднего швеллера, при этом один из крайних швеллеров соединен с осью упомянутого привода, а на другом крайнем швеллере установлена поворотная ось направляющего колеса, связанная с приводом ее поворота. Использование изобретения позволяет существенно упростить конструкцию робота и в то же время расширить его технологические возможности. 3 ил.
Мобильный робот, содержащий раму, снабженную тяговым колесом, связанным с приводом его вращения, боковым колесом и направляющим колесом, установленным на поворотной оси, средства питания, управления и информационного обеспечения, размещенные на раме, отличающийся тем, что рама выполнена в виде швеллеров, соединенных друг с другом своими боковыми сторонами уступами, образованными выдвижением крайних швеллеров в разные стороны относительно среднего швеллера, при этом один из крайних швеллеров соединен с осью упомянутого привода, а на другом крайнем швеллере установлена поворотная ось направляющего колеса, связанная с приводом ее поворота.
| CN 110466634 A, 19.11.2019 | |||
| CN 206154284 U, 10.05.2017 | |||
| ВИБРАЦИОННЫЙ ДАТЧИК ДАВЛЕНИЯ | 0 |
|
SU205343A1 |
| СПОСОБ ПОЛУЧЕНИЯ ПИРОФОСФАТОВ ИЛИ ПИРОФОСФОНАТОВ | 1967 |
|
SU216719A1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| ШАССИ КОЛЕСНОГО РОБОТА | 2014 |
|
RU2564796C2 |

