Изобретение относится к машиностроению, в частности к робототехнике.
Цель изобретения - повышение точности позиционирования за счет введения в кинематическую цепь жестких звеньев.
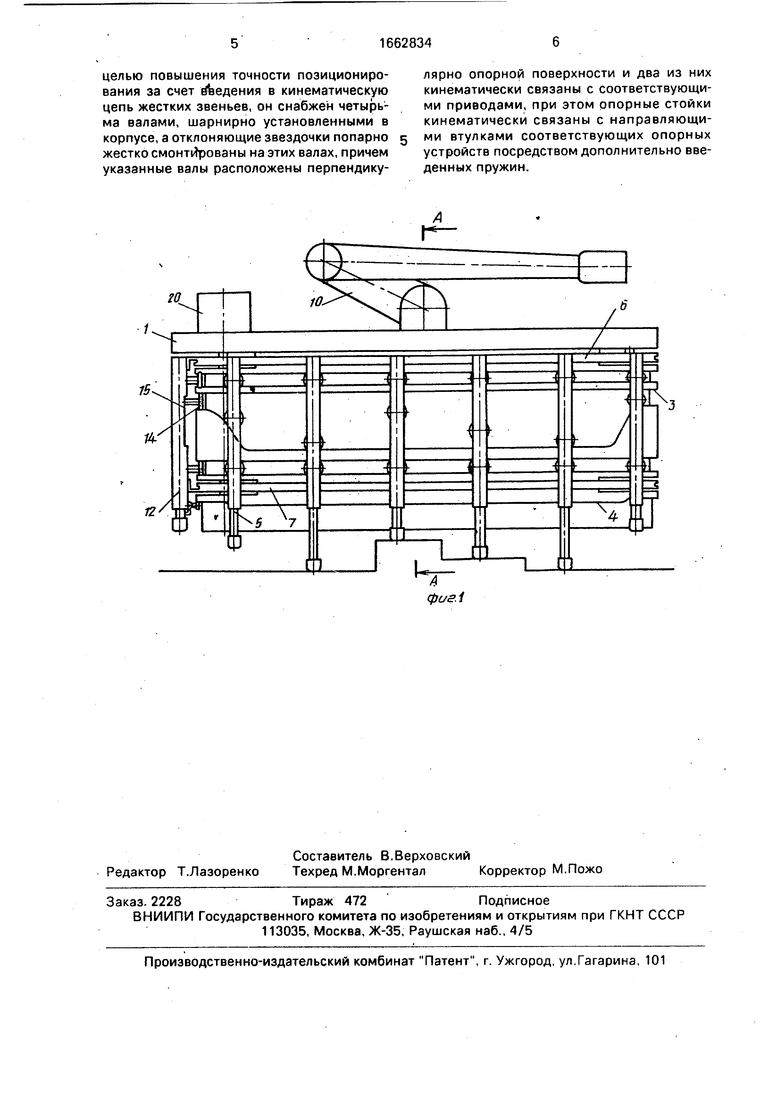
На фиг.1 изображен мобильный робот; на фиг,2 - разрез А-А на фиг.1.
Мобильный робот содержит корпус 1 с направляющими 2-4, опорные телескопические стойки 5 опорных устройств, механизм горизонтального перемещения корпуса 1 и стоек 5 в виде установленных по каждому борту двух замкнутых гибких элементов, выполненных в виде параллельных цепей 6 и 7, охватывающих ведущие звездочки 8 и 9 соответственно, манипулятор 10, установленный на корпусе 1, и систему управления (не показана). Одноименные ведущие звездочки 8 и 9 цепей 6 и 7 установлены соосно на расположенных вертикально (перпендикулярно опорной поверхности) валах 11, а опорные телескопические стойки 5 своими направляющими втулками 12 жестко соединены с одноименными ветвями цепей 6 и 7, Механизм вертикального перемещения каждой стойки 5 выполнен в виде пружины 13, с помощью которой стойка 5 подпружинена относительно втулки и ролика 14, установленного на стойке 5 с возможностью перемещения по выполненному во втулке 12 пазу 15 и взаимодействующего с направляющей 3 корпуса-1. На втулке 12 каждой опорной телескопической стойки 5 жестко установлены силовые ролики 36, взаимодействующие с направляющими 2, и механизм фиксации, выполненный в виде стопора 17, контактирующего с зубьями
18,выполненными на стойке 5, и ролика
19,установленного с возможностью взаимодействия с направляющей А. На корпусе 1 установлены приводы 20, от которых приводится в действие механизм горизонтального перемещения корпуса 1 и стоек 2.
Мобильный робот работает следующим образом.
При включении по команде от системы управления приводов 20 начинают вращаться валы 11, ведущие звездочки 8 и 9, а с
ними и цепи 6 и 7 с закрепленными на них втулками 12 стоек 5. Силовые ролики 16 при этом перемещаются по направляющим 2, препятствуя провисанию цепей 6 и 7. Ролик
14 каждой стойки 5 отслеживает направляющую 3, которая выполнена таким образом, что при нахождении стойки 5 на холостых ветвях (расположенных ближе к оси корпуса 1, фиг.2) цепей 6 и 7, она максимально
втянута во втулку 12, пружина 13 при этом сжата, ролик 14 занимает крайнее верхнее положение в пазу 15, а при переходе на рабочие ветви цепей 6 и 7 ролик 14, продолжая взаимодействовать с направляющей 3,
перемещается вдоль паза 15, освобождая тем самым пружину 13, которая, распрямляясь, выдвигает стойку 5 из втулки 12 и та входит в контакт с опорной поверхностью. Одновременно с этим ролик 19 механизмафиксации входит в направляющую 4, под действием чего стопор 17 вступает во взаимодействие с зубьями 18, и стойка 5 при этом фиксируется. По достижении опорной стойкой 5 правых (по фиг.1) звездочек 8 и 9
ролик 19 сходит с направляющей 3, стопор 17 выходит из зацепления с зубьями 18, а ролик 14, отслеживая направляющую 3, перемещается вверх по пазу 15, сжимая пружину 13 и втягивая стойку 5. Таким образом
мо бильный робот перемещается до места, где необходимо провести какие-либо операции, которые осуществляются манипулятором 10 по команде от системы управления. Формула изобретения
5Мобильный робот, содержащий корпус
с выполненными на нем направляющими, манипулятор, установленный на корпусе, приводы, также установленные на корпусе, опорные устройства, имеющие опорные
0 стойки, предназначенные для взаимодействия с опорной поверхностью, и направляющие втулки, кинематически связанные с приводами с помощью двух пар замкнутых гибких элементов, проходящих через от5 клоняющие звездочки, а также механизмы фиксации опорных стоек, имеющие возможность взаимодействия с направляющими корпуса, отличающийся тем, что, с
целью повышения точности позиционирования за счет введения в кинематическую цепь жестких звеньев, он снабжен четырь- ма валами, шарнирно установленными в корпусе, а отклоняющие звездочки попарно жестко смонтированы на этих валах, причем указанные валы расположены перпендикулярно опорной поверхности и два из них кинематически связаны с соответствующими приводами, при этом опорные стойки кинематически связаны с направляющими втулками соответствующих опорных устройств посредством дополнительно введенных пружин.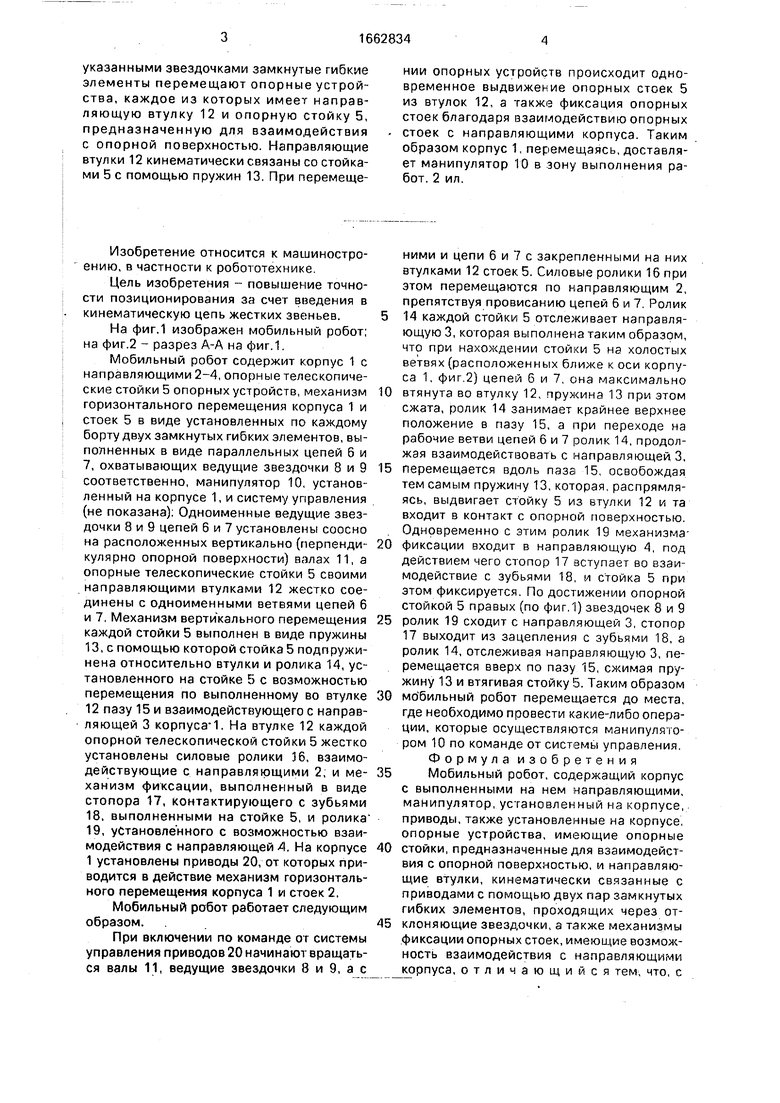
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный робот | 1988 |
|
SU1563968A1 |
| Рука манипулятора | 1983 |
|
SU1076276A1 |
| Тележечный конвейер | 1988 |
|
SU1578053A1 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| Поворотный стол для подачи кассет с деталями к роботу | 1989 |
|
SU1792775A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
Изобретение относится к машиностроению и может быть использовано в робототехнике. Цель изобретения - повышение точности позиционирования за счет введения в кинематическую цепь жестких звеньев. Робот содержит корпус 1 с выполненными на нем направляющими. Корпус несет на себе манипулятор 10 и приводы 20. При включении приводов 20 по команде от системы управления движения передаются на валы 11, шарнирно установленные в корпусе, а с них - на отклоняющие звездочки 8 и 9, попарно жестко смонтированные на этих валах. Взаимодействующие с указанными звездочками замкнутые гибкие элементы перемещают опорные устройства, каждое из которых иимеет направляющую втулку 12 и опорную стойку 5, предназначенную для взаимодействия с опорной поверхностью. Направляющие втулки 12 кинематически связаны со стойками 5 с помощью пружин 13. При перемещении опорных устройств происходит одновременное выдвижение опорных стоек 5 из втулок 12, а также фиксация опорных стоек благодаря взаимодействию опорных стоек с направляющими корпуса. Таким образом корпус 1, перемещаясь, доставляет манипулятор 10 в зону выполнения работ. 2 ил.
20
| Мобильный робот | 1988 |
|
SU1563968A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
