Заявляемое устройство предназначено для обнаружения, распознавания летящих и зависших вертолетов и их классификации. Оно может быть применено для получения информации о вертолетах, находящихся в зоне обнаружения радиолокационных станций (РЛС).
В настоящее время существуют устройства, предназначенные для распознавания класса винтовых летательных аппаратов. Рассмотрим некоторые из них, наиболее близкие предлагаемому устройству по техническому назначению.
Устройство по патенту США №43899647 «Доплеровское выделение воздушных целей» (МПК G 01 S 013/52, заявка №219455, заявлено 22.02.1980 г., заявитель - The United States of America as the Secretary of the Army) имеет ряд недостатков, а именно, при его использовании невозможно классифицировать модель винтового летательного аппарата. В данном устройстве обнаружение цели происходит на основании оценки существования максимумов амплитуды в доплеровском спектре, соответствующих сигналам, отраженным от лопастей несущего винта вертолета (далее - просто от лопастей вертолета). Стоит отметить, что для уверенного распознавания цели по данному методу, необходимо иметь на входе достаточно сильный сигнал, что в реальных условиях на фоне сигнала, отраженного от корпуса вертолета, и при наличии собственного шума приемника, сложно реализуемо. Кроме того, если РЛС работает с высоким темпом обзора (3-2 сек), то усложняется задача выделения полезного сигнала в доплеровском спектре, т.к. в предлагаемом устройстве доплеровский спектр невозможно построить из-за малого количества отсчетов принятого сигнала, отраженного от лопастей вертолета. Рассматриваемое устройство также не применимо для распознавания зависших вертолетов. Это связано с тем, что сигнал, отраженный от корпуса зависшего вертолета (с нулевой частотой Доплера), попадает в широкую полосу режекции, предназначенной для устранения сигналов, отраженных от местных предметов и метеообразований. В этом случае по полученной доплеровской характеристике невозможно точно получить отличительный «портрет» вертолета, на основании которого происходит распознавание. Наконец, данное устройство, обнаружив групповую цель, не может ее распознать и определить количество вертолетов в группе.
Наиболее близким по техническим возможностям является устройство, рассматриваемое в патенте США №5689268 «РЛС обнаружения и классификации вертолетов» (МПК G 01 S 013/52, заявка №691729 от 02.08.1996 г., заявитель - Boeing North American, Inc.)
Работа вышеуказанного устройства основана на обработке сигнала, отраженного от вертолета. Конечным результатом обработки является определение скорости вращения несущих винтов вертолета, на основании которой производится уверенное распознавание цели и классификация летательного аппарата.
Структурная схема прототипа представлена на фиг.1. На схеме приняты следующие обозначения:
1 - блок быстрого преобразования Фурье;
2 - режекторный фильтр;
3 - блок обратного преобразования Фурье;
4 - усреднитель мощности;
5 - автокоррелятор;
6 - блок определения скорости вращения винтов вертолета.
Отраженный сигнал, принятый антенной (сигнал во временной области), в блоке БПФ 1 подвергается процедуре быстрого преобразования Фурье. На основании полученного спектра определяется частота Доплера, соответствующая скорости движения корпуса летательного аппарата. Далее сигнал поступает в режекторный фильтр 2, в котором происходит компенсация сигналов, отраженных от корпуса вертолета и от местных предметов. Таким образом, в рассмотрении остается только сигнал, отраженный от лопастей вертолета. После режекторного фильтра 2 в блоке 3 происходит процедура обратного преобразования Фурье. После блока обратного преобразования Фурье 3 сигнал поступает на усреднитель мощности 4, в котором путем усреднения сигнала скользящим окном по временным интервалам улучшается отношение сигнал/шум. С усреднителя мощности 4 сигнал поступает на автокоррелятор 5. Процедура автокорреляции необходима для проведения классификации. Далее сигнал поступает в блок определения скорости вращения винтов вертолета 6. Классификация летательного аппарата осуществляется по значению скорости вращения винтов вертолета.
Данное устройство также имеет ряд недостатков. Обработка сигнала в указанном устройстве реализуется с применением режекторного фильтра, использование которого необходимо для удаления максимума амплитуды, соответствующего сигналу, отраженному от корпуса вертолета. Однако при режекции максимума амплитуды существует вероятность потери полезного сигнала (отраженного от лопастей несущего винта).
Что касается классификации, то главным недостатком устройства является неоднозначность определения скорости вращения несущего винта вертолета при наличии в зоне обнаружения РЛС нескольких винтовых летательных аппаратов, что довольно часто наблюдается в реальной жизни. Неоднозначность связана с тем, что в рассматриваемом устройстве предусмотрена фильтрация сигнала, отраженного от корпуса только одного вертолета. При наличии группы вертолетов необходима фильтрация сигналов, отраженных от всех вертолетов, что в данном устройстве сделать невозможно.
Кроме того, при работе вышеуказанного устройства обработка сигнала, требующая большого количества вычислительных операций, ведется в каждом блоке.
Необходимость создания РЛС, способных обнаруживать как летящие, так и зависшие вертолеты, возникла в связи с увеличением роли сил и средств армейской авиации. Для ведения боевых действий в армейской авиации, как правило, формируются подразделения вертолетов: взводы, роты, батальоны. В связи с этим возникает необходимость обнаружения, определения состава группы летательных аппаратов и их классификации.
Техническим результатом заявляемого технического решения является возможность определения состава обнаруженной группы вертолетов и классификация воздушных объектов, входящих в нее.
Кроме того, так как в предлагаемом устройстве во всех блоках, кроме блока быстрого преобразования Фурье и череспериодного вычитания, проводится анализ, а не обработка сигнала, при реализации предлагаемой схемы требуется значительно меньшее количество вычислительных операций, чем в прототипе.
Структурная схема заявляемого устройства приведена на фиг.2. На схеме приняты следующие обозначения:
1 - блок быстрого преобразования Фурье (БПФ);
2 - блок определения пиков;
3 - блок череспериодного вычитания (ЧПВ);
4 - пороговое устройство;
5 - блок определения периода;
6 - блок базы данных;
7 - индикатор.
Предлагаемое устройство состоит из последовательно соединенных БПФ 1, блока определителя пиков в доплеровском спектре 2, блока ЧПВ 3, порогового устройства 4, блока определения периода 5, блока базы данных 6 и индикатора 7. При этом сигнал с антенны поступает на блок БПФ 1 и второй вход блока ЧПВ 3, а второй выход порогового устройства 4 соединен со вторым входом индикатора 7.
Опыт показывает, что вращающимися металлическими или пластиковыми лопастями несущего винта формируется достаточно сильный отраженный сигнал, вид которого обусловлен формой винта. Кроме того, в отраженном сигнале можно выделить признаки пропеллерной модуляции, которые также связаны с вращением лопастей несущих винтов вертолетов.
Работа заявляемого устройства основана на анализе отражений зондирующего радиосигнала от лопастей несущего винта летательного аппарата. Так как период вращения лопастей является отличительной характеристикой вертолета, то на основании установленного периода вращения винтов вертолета производится классификация летательного аппарата (определение модели вертолета).
Отраженный от лопастей несущего винта вертолета сигнал, принятый антенной (сигнал во временной области), в блоке БПФ 1 подвергается процедуре быстрого преобразования Фурье. На основании полученного доплеровского спектра в блоке определения пиков 2 определяется частота Доплера, соответствующая скорости движения корпуса летательного аппарата относительно антенны РЛС. Для компенсации сигнала, отраженного от корпуса вертолета, с блока определения пиков 2 сигнал подается на первый вход блока ЧПВ 3, на второй вход которого поступает сигнал с антенны. Компенсация составляющей сигнала (сигнал, отраженный от корпуса летательного аппарата) пятикратной системой череспериодного вычитания в блоке ЧПВ 3 осуществляется за счет подавления сигналов, неизменных по амплитуде от периода к периоду повторения. В результате на выходе блока ЧПВ 3 после подавления сигнала, отраженного от корпуса, в рассмотрении остается лишь сигнал, отраженный от несущего винта. Далее сигнал поступает на пороговое устройство 4, в котором происходит определение максимального значения амплитудной модуляции в обработанном сигнале. Появление в обработанном сигнале существенных пиков свидетельствует о наличии летательного аппарата, т.к. данные максимальные значения амплитудной модуляции сигнала соответствуют сигналам, отраженным от лопастей несущего винта вертолета. С порогового устройства 4 сигнал поступает на блок определения периода 5, в котором определяется период амплитудной модуляции. Полученное значение периода амплитудной модуляции поступает в блок базы данных 6 для сравнения с данными базы и определения модели вертолета на основе анализа. Результаты анализа выводятся на индикатор 7.
При использовании предлагаемого устройства появляется возможность не только распознавать одиночные и в группе летящие и зависшие вертолеты, но и с достаточной степенью точности определять их модели.
Предлагаемое устройство является высокоэффективным и недорогим средством и может быть реализовано в РЛС, обеспечивающих мониторинг воздушной обстановки.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2622908C1 |
| Способ обнаружения вертолетов бортовой радиолокационной станцией | 2018 |
|
RU2691387C1 |
| Способ классификации вертолётов с одним несущим винтом на режиме горизонтального полёта | 2024 |
|
RU2834238C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
| Способ подавления пассивных помех с малым доплеровским смещением | 2019 |
|
RU2729886C1 |
| Способ сопровождения вертолета в импульсно-доплеровской радиолокационной станции | 2019 |
|
RU2728278C1 |
| Способ сопровождения вертолета в импульсно-доплеровской радиолокационной станции | 2022 |
|
RU2784544C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ МЕСТНЫХ ПРЕДМЕТОВ | 2000 |
|
RU2201602C2 |
| Способ обработки радиолокационных сигналов в моноимпульсной РЛС | 2016 |
|
RU2636058C1 |
| Способ многопризнакого распознавания в многофункциональной радиолокационной станции класса летательного аппарата по принципу "самолет с турбореактивным двигателем - самолет с турбовинтовым двигателем - вертолет - ракета - беспилотный летательный аппарат" на основе совместного применения калмановской фильтрации и нейронной сети | 2024 |
|
RU2832712C1 |

Изобретение относится к радиолокации и может быть использовано в РЛС, обеспечивающих мониторинг воздушной обстановки. Техническим результатом является возможность определения состава обнаруженной группы вертолетов и классификация воздушных объектов, входящих в нее. Устройство для обнаружения и классификации летящих, одиночных и в группе, вертолетов, состоящее из последовательно включенных: блока быстрого преобразования Фурье, блока определения пиков в доплеровском спектре, блока череспериодного вычитания, порогового устройства, блока определения периода амплитудной модуляции сигнала, который соответствует сигналам, отраженным от лопастей несущего винта вертолета, блока базы данных и индикатора, причем блок базы данных выполнен с возможностью сравнения полученного значения периода амплитудной модуляции сигнала с данными базы и определения на основе этого сравнения модели вертолета, при этом сигнал, принятый антенной, поступает на вход блока быстрого преобразования Фурье и на второй вход блока череспериодного вычитания, а второй выход порогового устройства соединен со вторым входом индикатора. 2 ил.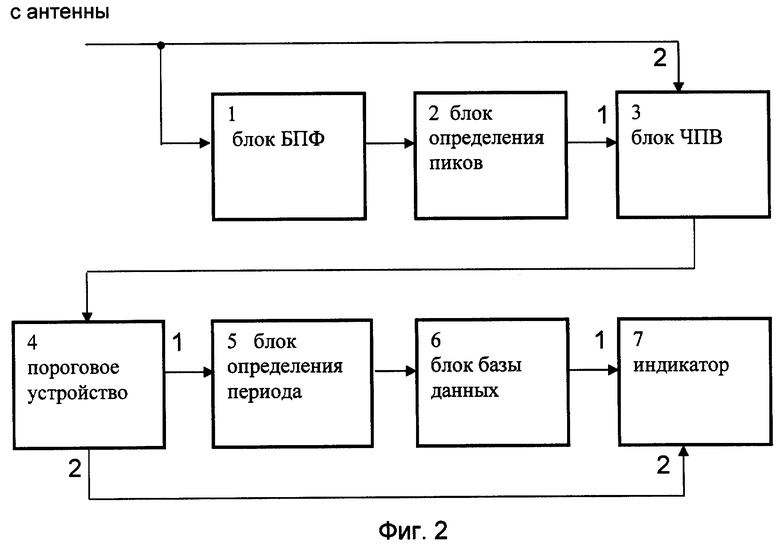
Устройство для обнаружения и классификации летящих, одиночных и в группе, вертолетов, состоящее из последовательно включенных блока быстрого преобразования Фурье, блока определения пиков в доплеровском спектре, блока череспериодного вычитания, порогового устройства, блока определения периода амплитудной модуляции сигнала, который соответствует сигналам, отраженным от лопастей несущего винта вертолета, блока базы данных и индикатора, причем блок базы данных выполнен с возможностью сравнения полученного значения периода амплитудной модуляции сигнала с данными базы и определения на основе этого сравнения модели вертолета, при этом сигнал, принятый антенной, поступает на вход блока быстрого преобразования Фурье и на второй вход блока череспериодного вычитания, а второй выход порогового устройства соединен со вторым входом индикатора.
| US 5689268 А, 18.11.1997 | |||
| СПОСОБ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2042151C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ С ЗАЩИТОЙ ОТ ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2003 |
|
RU2246736C1 |
| СПОСОБ АНТИСТАТИЧЕСКОЙ ОБРАБОТКИ ТЕРМОПЛАСТИЧНЫХ ПОЛИМЕРОВ | 0 |
|
SU308585A1 |
| Люлька для расстойки тестовых заготовок | 1973 |
|
SU443658A1 |
| DE 3740141 A, 08.06.1989. | |||

