Изобретение относится к электротехнике, к выпрямительным установкам с принудительной коммутацией, используемым, например, в качестве входных преобразователей на электроподвижном составе переменного тока.
Известен способ управления четырехквадрантным преобразователем, состоящий в том, что полупериод питающего напряжения разбивают на равные интервалы, для каждого интервала определяют значение тока, которое необходимо достичь на данном интервале, на каждом интервале замыкают источник входного напряжения на входную индуктивность до тех пор, пока ток не достигнет определенного значения на этом интервале, после чего источник входного напряжения до конца интервала размыкают (см. МКИ3 Н 02 М 1/12 заявка ФРГ №2217023, публикация 1980 г., 9 октября, №41 Brown, Boveri&Cie AG, 6800 Mannheim. Nill, Reiner).
На фиг.1 приведена схема четырехквадрантного преобразователя, а на фиг.2 - осциллограмма исследования этого способа управления на испытательном стенде ОАО "ВЭлНИИ" (см.: Сб. науч. тр. Электровозостроение / ОАО "Всерос. н-и., и проектно-конструкт. ин-т электровозостроения" (ОАО "ВЭлНИИ"). - 2003. - Т.45. - С.341-354).
На осциллограмме видно, как на первом интервале входной ток, достигнув заданного значения, снова спадает до нуля. При таком способе управления невозможно обеспечить высокое значение коэффициента формы тока и, следовательно, высокое качество управления - высокий коэффициент мощности.
Наиболее близким по технической сущности являют способ управления четырехквадрантным преобразователем, так называемый "токовый коридор", состоящий в том, что вводят амплитуду заданного значения тока I3 и определяют заданное мгновенное значение тока по формуле i3=I3sinωt, где ω - круговая частота питающего напряжения, t - время. В положительном полупериоде питающего напряжения замыкают источник входного напряжения на входную индуктивность L пока ток не достигнет суммы заданного значения и величины допустимого отклонения, размыкают источник входного напряжения пока ток не достигнет разности заданного значения и величины допустимого отклонения, затем опять замыкают источник входного напряжения на входную индуктивность, пока ток не достигнет суммы заданного значения и величины допустимого отклонения, размыкают источник входного напряжения пока ток не достигнет разности заданного значения и величины допустимого отклонения и т.д. до конца положительного полупериода питающего напряжения, в отрицательном полупериоде питающего напряжения замыкают источник входного напряжения на входную индуктивность пока ток не достигнет разности заданного значения и величины допустимого отклонения, размыкают источник входного напряжения пока ток не достигнет суммы заданного значения и величины допустимого отклонения, затем опять замыкают источник входного напряжения на входную индуктивность пока ток не достигнет разности заданного значения и величины допустимого отклонения, размыкают источник входного напряжения пока ток не достигнет суммы заданного значения и величины допустимого отклонения и т.д. до конца отрицательного полупериода, (см. Kerman H. Lienau W. wid Nill R.: Vierquadrantensteller - eine netzfreundlieche Einspeiswig fur Triebfahrzeuge mit Drehstromantrieb. Elektrische Bahnen 45 (1974), H.6 S.135-142).
Способ проиллюстрирован фиг.3.
Этот способ имеет следующий недостаток. Если выбрать величину допустимого действующего отклонения ΔI ("токового коридора") большим, то число замыканий-размыканий будет меньше, чем допускают вентили четырехквадрантного преобразователя и форма тока не обеспечит высокий коэффициент мощности. Если же выбрать ширину "токового коридора" малой, то число переключении (замыканий-размыканий) превысит допустимую и вентили выйдут из строя.
Задачей изобретения являют повышение энергетических показателей четырехквадрантного преобразователя за счет реализации "токового коридора" с максимально возможным числом переключении.
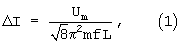
Поставленная задача решают способом управления преобразователем, при котором вводят амплитуду заданного значения тока I3 и определяют заданное мгновенное значение тока по формуле i3=I3sinωt, в положительном полупериоде питающего напряжения замыкают источник входного напряжения на входную индуктивность пока ток не достигнет суммы заданного значения и величины допустимого отклонения, размыкают источник входного напряжения пока ток не достигнет разности заданного значения и величины допустимого отклонения, затем опять замыкают источник входного напряжения на входную индуктивность, пока ток не достигнет суммы заданного значения и величины допустимого отклонения, размыкают источник входного напряжения пока ток не достигнет разности заданного значения и величины допустимого отклонения и т.д. до конца положительного полупериода питающего напряжения, в отрицательном полупериоде питающего напряжения замыкают источник входного напряжения на входную индуктивность пока ток не достигнет разности заданного значения и величины допустимого отклонения, размыкают источник входного напряжения пока ток не достигнет суммы заданного значения и величины допустимого отклонения, затем опять замыкают источник входного напряжения на входную индуктивность пока ток не достигнет разности заданного значения и величины допустимого отклонения, размыкают источник входного напряжения пока ток не достигнет суммы заданного значения и величины допустимого отклонения и т.д. до конца отрицательного полупериода. При этом величину допустимого отклонения определяют по формуле:
где Um - амплитудное значение питающего напряжения;
L - индуктивность входной цепи преобразователя;
m - число переключении за полупериод;
f - частота питающего напряжения.
Определение величины допустимого отклонения по формуле (1) характеризует максимально возможную частоту переключения вентилей, а следовательно, и форму тока, максимально возможно близкую к синусоиде, что приводит к улучшению формы тока и коэффициента мощности, повышая энергетические показатели четырехквадрантного преобразователя.
На фиг.1 приведена схема четырехквадрантного преобразователя.
На фиг.2 показана осциллограмма исследования известного (см. прототип) способа управления четырехквадрантным преобразователем на испытательном стенде ОАО "ВЭлНИИ".
На фиг.3 показана зависимость сетевого тока при способе управления четырехквадрантным преобразователем "токовый коридор".
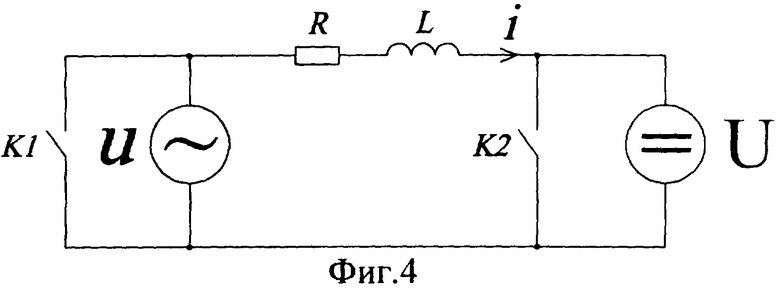
На фиг.4 приведена схема замещения четырехквадрантного преобразователя.
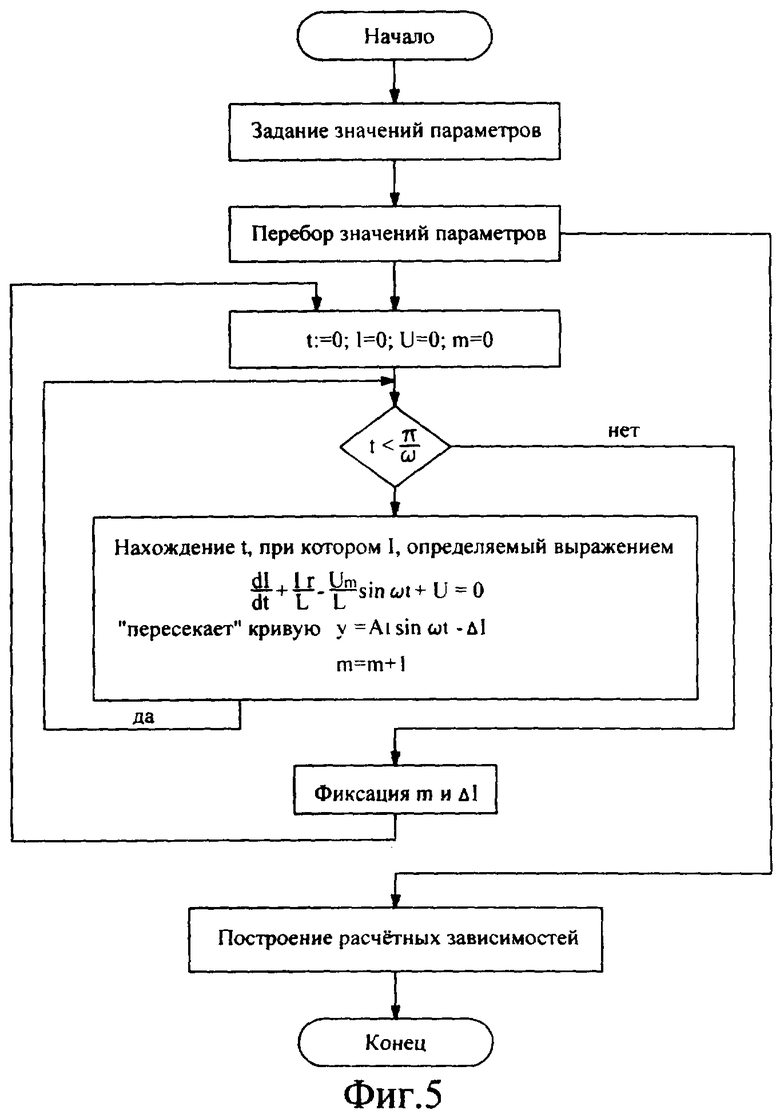
На фиг.5 представлен алгоритм определения зависимости ширины "токового коридора" от числа переключений.
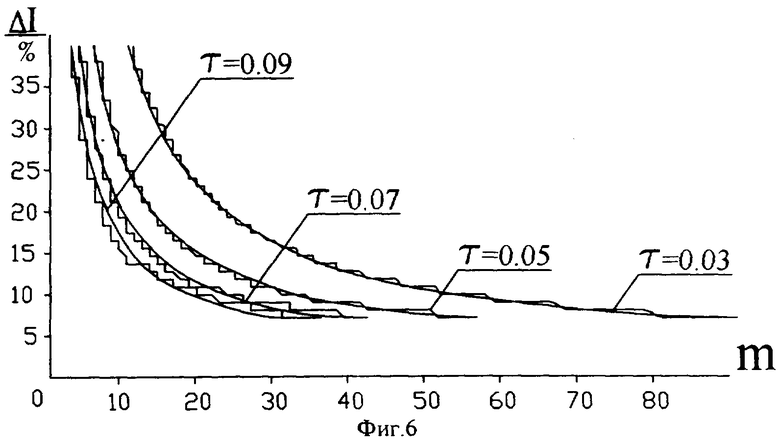
На фиг.6 показаны результаты сравнения величины токового коридора от числа переключений, полученные по формуле (1) с результатами моделирования при различных соотношениях постоянной времени τ=L/R входной цепи четырехквадрантного преобразователя.
На фиг.7 изображено устройство для реализации предлагаемого способа управления.
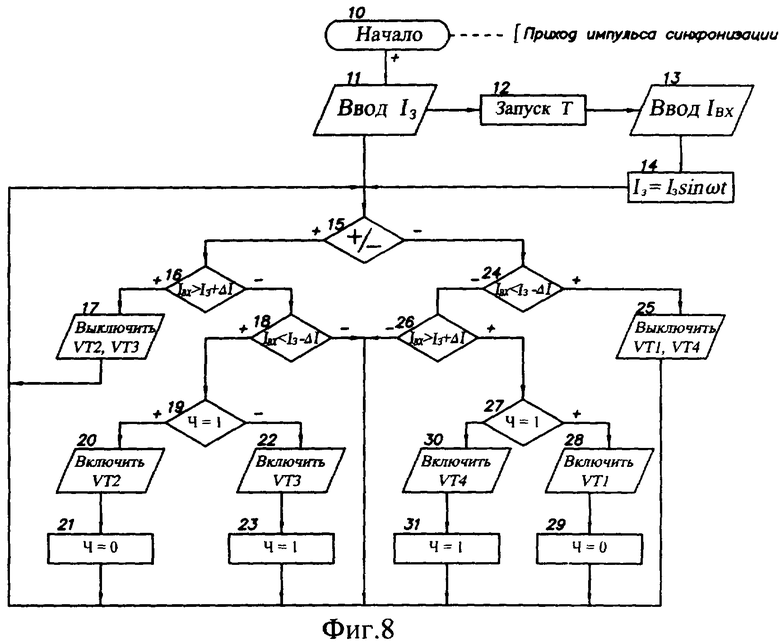
На фиг.8 представлен алгоритм работы устройства.
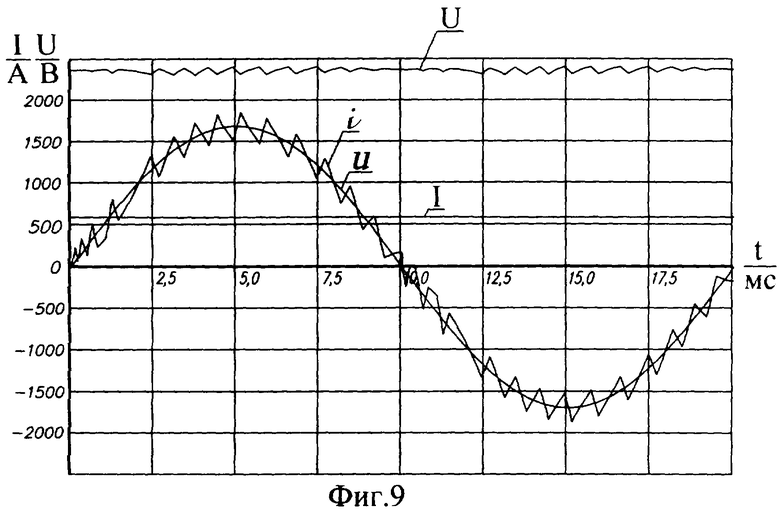
На фиг.9 показаны временные диаграммы предложенного способа управления.
На фиг.4 приведена схема замещения четырехквадрантного преобразователя. На схеме u=Umsinωt - напряжение питания преобразователя;
R, L - параметры входной цепи преобразователя, соответственно активное сопротивление и индуктивность;
U - выходное напряжение преобразователя, которое может подключаться для увеличения входного тока i преобразователя;
К1, К2 - ключи, служащие для подключения и отключения u и U.
Когда i превышает i3 на величину допустимого отклонения ΔI замыкают ключ К1 и отключает u, когда i становится меньше разности iз и ΔI ключ К1 размыкают и u снова подключают. Если при подключенном "u" ток все-таки становится меньше ip-ΔI, то размыкают ключ К2 и ток увеличивают при совместном действии u и U. При достижении током значения iз+ΔI, ключ К2 замыкают и U отключают.
Зависимость ширины "токового коридора" от числа переключении определялась алгоритмом, приведенным на фиг.5. На фиг.6 показаны результаты сравнения зависимости величины токового коридора ΔI от числа переключений m, полученные по формуле (1) - (гладкая линия) с результатами моделирования по блок-схеме (фиг.5) при различных соотношениях постоянной времени τ=L/R входной цепи четырехквадрантного преобразователя. Допустимыми считались наборы параметров, при которых ток может оставаться внутри "коридора". Например, при недостаточном значении входного напряжения вообще невозможно достижение необходимого значения тока, при малом значении L ток растет настолько быстро, что количество переключений будет заведомо значительно больше допустимого.
Эти зависимости с точностью 4% аппроксимированы выражением (1).
Способ реализуют микропроцессорной системой (фиг.7), состоящей из таймера 1, процессора 2, оперативного запоминающего устройства (ОЗУ) 3, постоянного запоминающего устройства (ПЗУ) 4, аналого-цифрового преобразователя (АЦП) 5, блока драйверов 6, управляющих четырехквадрантным преобразователем 7, имеющим датчик входного тока Iвх, выход которого соединен с одним из входом АЦП 5, на другой вход которого подается заданное значение амплитуды входного тока Iз, и синхронизатора 8. Входы-выходы таймера 1, процессора 2, ОЗУ 3, ПЗУ 4, выход АЦП 5 и входы блока драйверов 6 объединены шиной адрессов-данных 9. Четырехквадрантный преобразователь 7 и синхронизатор 8 запитаны переменным напряжением u.
Вход синхронизатора 8 соединен со входом сброса таймера 1 и шиной прерывания процессора 2.
Таймер, процессор, ОЗУ, ПЗУ и АЦП могут быть интегрированы в специализированный контроллер, например, М167-1С (см. каталог продукции "Бортовая промышленная электроника" АО "Каскод", 105037 Москва, Измайловская пл., 7).
Способ реализуют алгоритмом, приведенным на фиг.8. Выполнение его происходит в каждом полупериоде питающего напряжения.
По приходу синхроимпульса СИ в начале каждого полупериода (блок 10) осуществляют ввод амплитуды заданного значения тока Iз (блок 11), запуск таймера (блок 12), ввод мгновенного значения входного тока Iвх (блок 13) и определение необходимого в данный момент значения входного тока (блок 14) по формуле
iз=Iзsinωt,
где значение ωt соответствует данному моменту времени и содержимому таймера.
В блоке 15 определяют полярность полупериода питающего напряжения и, в случае положительного полупериода (+/-=1), в блоке 16 проверяют превышение входным током суммы заданного значения и допустимого отклонения. Допустимое отклонение ΔI заранее определяют по формуле (1) и заносят в ПЗУ 4. В случае превышения Iвх значения суммы iз+ΔI в блоке 17 через блок драйверов 6 выключают транзисторы VT2, VT3, работающие в положительном полупериоде. Если входной ток не превышает значения суммы iз+ΔI, то в блоке 18 проверяют выход входного тока за нижнюю границу "токового коридора" iз-ΔI и, в случае выхода, в зависимости от того, какой транзистор был включен до этого (блок 19), значение флага "Ч", включают один из транзисторов работающих в положительном полупериоде (блоки 20, 22). Транзисторы работают поочередно для снижения их частоты переключения. В блоках 21, 23 осуществляют новую установку флага "Ч", после чего процесс повторяют, начиная с блока 13.
В отрицательном полупериоде питающего напряжения (+/-=0), в случае превышения входным током верхней отрицательной границы "токового коридора" (Iвх<iз-ΔI, блок 25) через блок драйверов 6 выключают транзисторы VT1 и VT4. В случае выхода тока за нижнюю отрицательную границу (блок 26) в зависимости от установки флага "Ч" включают транзисторы VT1 или VT4 (блоки 28, 30), после чего меняют значение флага "Ч" (блоки 29, 31). Так продолжают до конца периода питающего напряжения, до прихода следующего синхроимпульса СИ, после чего цикл алгоритма на фиг.8 повторяют.
На фиг.9 приведены временные диаграммы способа управления для числа переключении за полупериод питающего напряжения m =15. Ширина токового коридора определена в соответствии с формулой (1).
Применение данного способа управления позволяет полностью использовать возможности вентилей четырехквадрантного преобразователя, максимально возможно приблизив кривую потребляемого тока к синусоиде, тем самым улучшить форму тока и повысить энергетические показатели преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СЕТЕВОГО ТОКА ЧЕТЫРЕХКВАДРАНТНОГО ПРЕОБРАЗОВАТЕЛЯ | 2009 |
|
RU2419950C2 |
| СПОСОБ УПРАВЛЕНИЯ ОДНОФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ И ОДНОФАЗНЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ, УПРАВЛЯЕМЫЙ ПО ЭТОМУ СПОСОБУ | 2005 |
|
RU2304839C2 |
| СПОСОБ ПРОГНОЗИРУЮЩЕГО ВЕКТОРНОГО РЕГУЛИРОВАНИЯ ЧЕТЫРЕХКВАДРАНТНОГО ПРЕОБРАЗОВАТЕЛЯ | 2004 |
|
RU2284635C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2006 |
|
RU2315416C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2315415C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| Способ автоматического управления током тяговых электродвигателей подвижного состава | 2022 |
|
RU2787135C1 |
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2016 |
|
RU2629009C2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2009 |
|
RU2383984C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЁХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ФОРМИРОВАНИЕМ МОДУЛИРУЮЩЕГО СИГНАЛА | 2008 |
|
RU2396690C1 |
Изобретение относится к электротехнике и может быть использовано в выпрямительных установках с принудительной коммутацией, в качестве входных преобразователей на электроподвижном составе переменного тока. Техническим результатом является повышение энергетических показателей четырехквадрантного преобразователя за счет реализации "токового коридор" с максимально возможным числом переключении. В способе управления четырехквадрантным преобразователем поочередно замыкают источник входного напряжения на индуктивность и размыкают его на всем положительном полупериоде питающего напряжения до момента достижения током при каждой коммутации соответственно суммы заданного значения и величины допустимого отклонения и разности заданного значения и величины допустимого значения, а на всем отрицательном полупериоде питающего напряжения замыкают источник входного напряжения пока ток не достигнет разности заданного значения и величины допустимого отклонения, и размыкают источник входного напряжения пока ток не достигнет суммы указанных величин. Величину допустимого отклонения тока определяют по формуле ΔI=Um/8π2mfL, где Um - амплитудное значение питающего напряжения, L - индуктивность входной цепи преобразователя, m - число переключении за полупериод, f - частота питающего напряжения. В способе управления полностью используется мощность силовых полупроводниковых приборов, реализуется максимально возможная частота переключения, улучшается форма потребляемого тока с обеспечением максимального приближения ее до квазисинусоидальной формы, что приводит к улучшению коэффициента мощности, снижению нагрузки на питающую сеть. 9 ил.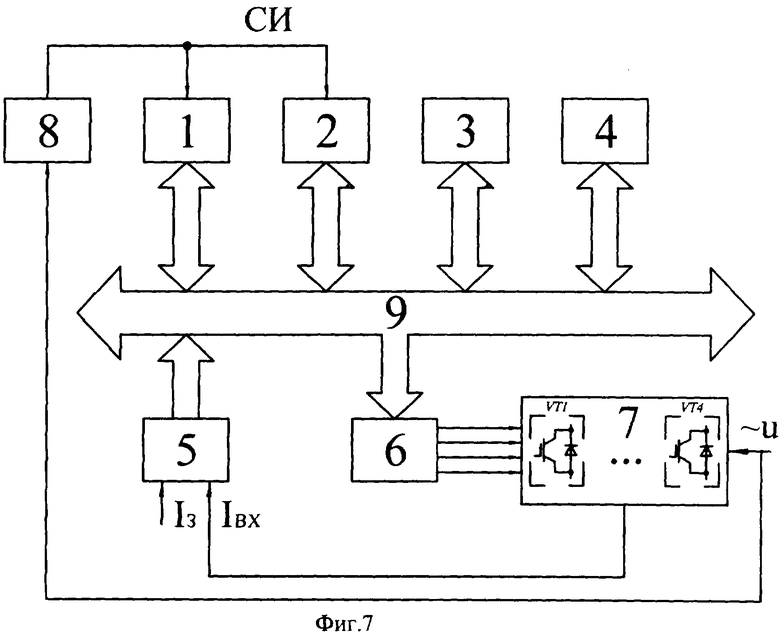
Способ управления четырехквадрантным преобразователем, состоящий в том, что вводят амплитуду заданного значения тока и определяют заданное мгновенное значение тока по формуле
i3=I3sinωt,
где I3 - амплитуда заданного значения тока;
ω - круговая частота питающего напряжения;
t - время,
в положительном полупериоде питающего напряжения замыкают источник входного напряжения на входную индуктивность, пока ток не достигнет суммы заданного значения и величины допустимого отклонения, размыкают источник входного напряжения, пока ток не достигнет разности заданного значения и величины допустимого отклонения, затем опять замыкают источник входного напряжения на входную индуктивность, пока ток не достигнет суммы заданного значения и величины допустимого отклонения, размыкают источник входного напряжения, пока ток не достигнет разности заданного значения и величины допустимого отклонения и т.д. до конца положительного полупериода питающего напряжения, в отрицательном полупериоде питающего напряжения замыкают источник входного напряжения на входную индуктивность, пока ток не достигнет разности заданного значения и величины допустимого отклонения, размыкают источник входного напряжения, пока ток не достигнет суммы заданного значения и величины допустимого отклонения, затем опять замыкают источник входного напряжения на входную индуктивность, пока ток не достигнет разности заданного значения и величины допустимого отклонения, размыкают источник входного напряжения, пока ток не достигнет суммы заданного значения и величины допустимого отклонения и т.д. до конца отрицательного полупериода, отличающийся тем, что величину допустимого отклонения определяют по формуле
где Um - амплитудное значение питающего напряжения;
L - индуктивность входной цепи преобразователя;
m - число переключении за полупериод;
f - частота питающего напряжения.
| KERMAN H., LIENAN W | |||
| und NILL R: Vierquadrantensteller - eine netzfreundlieehe Einpeisuny fur Triebfahrzeuge mit Drehstromantrieb | |||
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ С ШИМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2091979C1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2046517C1 |
| Способ управления мостовым инвертором напряжения | 1989 |
|
SU1653106A1 |
| Способ управления инвертором напряжения | 1986 |
|
SU1403301A1 |
| Устройство для определения коэффициента гофрирования | 1982 |
|
SU1105750A1 |
| US 4629959 А, 16.12.1986 | |||
| УСОВЕРШЕНСТВОВАНИЯ В ЧУЛОЧНО-НОСОЧНЫХ ИЗДЕЛИЯХ | 1998 |
|
RU2217023C2 |

