Изобретение относится к области электротехники, а именно к управлению входными преобразователями электроподвижного состава переменного тока.
Известен способ управления четырехквадрантным преобразователем, состоящий в том, что ток источника переменной э.д.с. регулируют изменением продолжительности времени приложения к нему э.д.с. источника переменной э.д.с. и разности переменной э.д.с. источника переменной э.д.с и напряжения емкости выходного фильтра, продолжительности приложения э.д.с. источника переменной э.д.с. и разности э.д.с. источника переменной э.д.с. и напряжения емкости выходного фильтра определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала, сдвинутых относительно питающего напряжения на угол нагрузки (см. Литовченко В.В. 4q-S-Четырехквадрантный преобразователь электровозов переменного тока // Изв. вузов. Электромеханика. 2000. №3. С.64-73).
Этот способ реализуется посредством сложных определений времени приложения переменной э.д.с. и разности переменной э.д.с. и напряжения выходного фильтра. Кроме того, способ не учитывает изменения параметров питающей сети от, например, перемещения электроподвижного состава по участку пути или параметров нагрузки преобразователя, например индуктивности питающихся от него тяговых индукторных двигателей.
Наиболее близким по технической сущности является способ управления четырехквадрантным преобразователем, заключающийся в том, что регулируют ток источника переменной э.д.с. изменением продолжительности времени приложения к нему переменной э.д.с. и разности переменной э.д.с. и напряжения емкости выходного фильтра, для чего полупериод питающего напряжения разбивают на m равных интервалов, в начале каждого полупериода переменной э.д.с. определяют разность между заданным и текущим напряжениями емкости выходного фильтра, вводят эту разность в регулятор, определяют для каждого из m интервалов заданное значение тока источника переменной э.д.с. по формуле
 ,
,
где А - сигнал с выхода регулятора;
k - номер интервала,
в начале каждого интервала прикладывают к источнику переменной э.д.с. переменную э.д.с., пока ток источника переменной э.д.с. меньше по модулю заданного значения тока на этом интервале, после чего до конца интервала прикладывают к источнику переменной э.д.с. разность переменной э.д.с. и напряжения емкости выходного фильтра, причем если в начале интервала ток источника переменной э.д.с. по модулю больше заданного значения, то к источнику сразу прикладывают разность переменной э.д.с. и напряжения емкости выходного фильтра (см. заявку 2004137243109 РФ, МПК7 Н02М 7/515, B60L 7/12. Способ управления четырехквадрантным преобразователем / А.В.Беляев; заявитель и патентообладатель Всерос. н.-и. и проектно-конструкт. Ин-т электровозостроения (ОАО «ВЭлНИИ»).
Этот способ имеет следующий недостаток. При малом значении напряжения питающей сети, например в начале полупериода переменной э.д.с., ток источника переменной э.д.с. может не достичь заданного значения на данном интервале, а поэтому может не достичь его и на следующем и т.д., пока значение переменной э.д.с. не станет достаточным для достижения необходимого значения тока. В результате, в начале полупериодов переменной э.д.с., кривая тока источника переменной э.д.с. будет «завалена» и значение коэффициента мощности окажется низким.
Задачей изобретения является повышение коэффициента мощности четырехквадрантного преобразователя.
Поставленная задача решается тем, что в известном способе управления четырехквадрантным преобразователем, при котором регулируют ток источника переменной э.д.с. изменением продолжительности времени приложения к нему переменной э.д.с. и разности переменной э.д.с. и напряжения емкости выходного фильтра, для чего полупериод питающего напряжения разбивают на m равных интервалов, в начале каждого полупериода переменной э.д.с. определяют разность между заданным и текущим напряжениями емкости выходного фильтра, вводят эту разность в регулятор, определяют для каждого из m интервалов заданное значение тока источника переменной э.д.с. по формуле
,
где А - сигнал с выхода регулятора;
k - номер интервала,
в начале каждого интервала прикладывают к источнику переменной э.д.с. переменную э.д.с., пока ток источника переменной э.д.с. меньше по модулю заданного значения тока на этом интервале, после чего до конца интервала прикладывают к источнику переменной э.д.с. разность переменной э.д.с. и напряжения емкости выходного фильтра, если в начале интервала ток источника переменной э.д.с. по модулю больше заданного значения, то к источнику сразу прикладывают разность переменной э.д.с. и напряжения емкости выходного фильтра, а если ток источника переменной э.д.с. не достиг заданного значения до конца интервала, то в начале следующего интервала прикладывают к источнику переменной э.д.с. сумму переменной э.д.с. и напряжения емкости выходного фильтра.
При таком способе управления четырехквадрантным преобразователем сумма значений э.д.с. источника переменной э.д.с. и напряжения емкости выходного фильтра обеспечивают необходимое значение тока почти на всех интервалах, что повышает коэффициент мощности преобразователя.
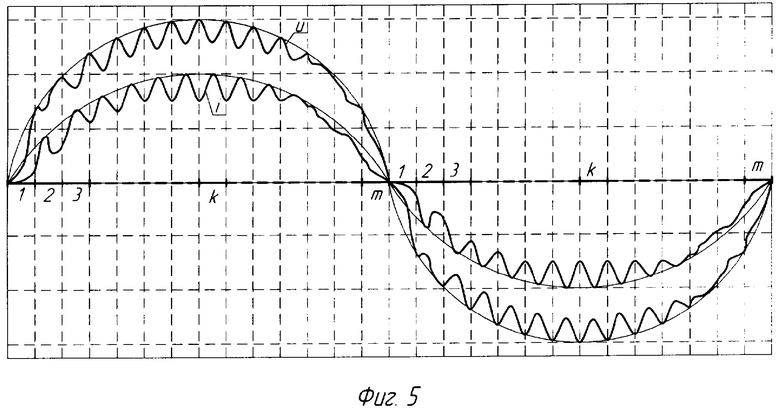
На фиг.1 показана принципиальная схема преобразователя; на фиг.2 - устройство, реализующее данный способ управления; на фиг.3 - алгоритм работы устройства в текущем полупериоде переменной э.д.с.; на фиг.4, 5 - временные диаграммы реализации способа по прототипу и по предлагаемому способу соответственно.
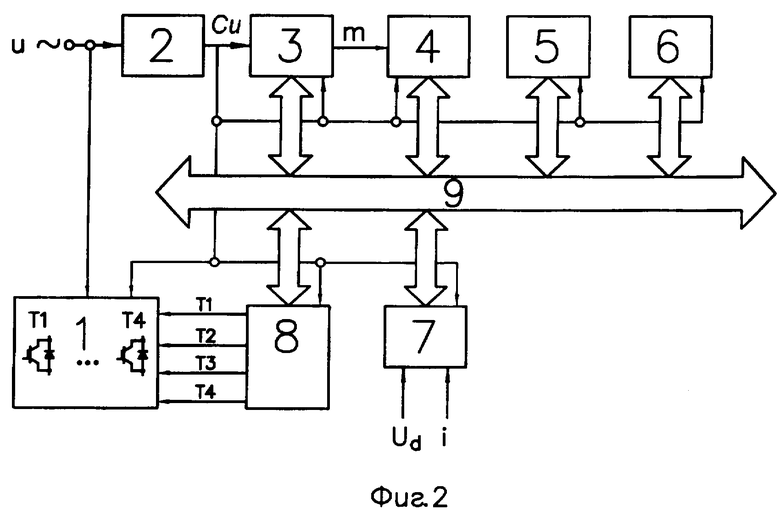
Преобразователь 1 (фиг.2) управляется микропроцессорной системой, состоящей из блока синхронизации 2, блока формирования прерываний 3, процессора 4, оперативного запоминающего устройства (ОЗУ) 5, постоянного запоминающего устройства (ПЗУ) 6, аналогово-цифрового преобразователя (АЦП) 7, блока ввода-вывода дискретных сигналов (БВВ) 8. Входы-выходы блока формирования прерываний 3, процессора 4, ОЗУ 5, ПЗУ 6, АЦП 7, блока ввода-вывода дискретных сигналов 8 соединены шиной адресов-данных 9.
Выход блока ввода-вывода дискретных сигналов 8 соединен с управляющими цепями вентилей преобразователя 1, нагруженного на питающую контактную сеть переменного тока, с которой соединен и вход блока синхронизации 2, выход которого соединен со входом блока формирования прерываний 3. Выходы блока 3 соединены с шинами прерывания процессора 4.
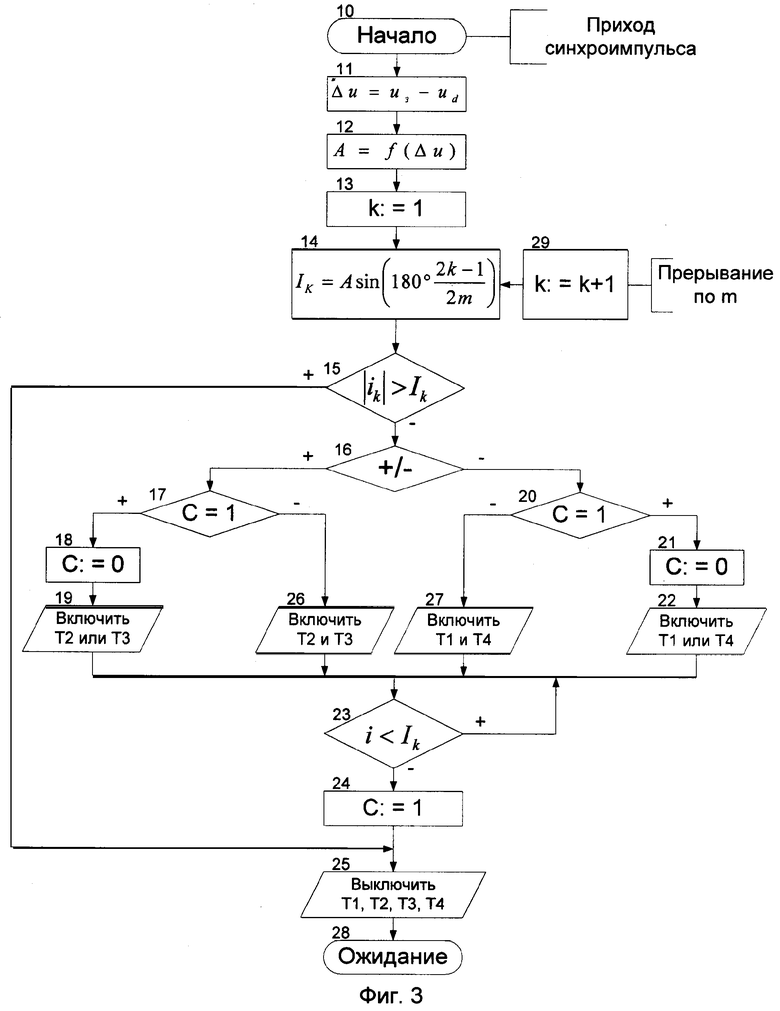
Способ реализуется алгоритмом, приведенным на фиг.3.
При переходе питающего напряжения через нулевое значение на выходе блока синхронизации 2 появляется импульс синхронизации СИ, который запускает блок формирования прерываний 3, на выходе m которого появляются сигналы запроса прерываний через равные временные интервалы, на которые разбит полупериод переменной э.д.с., устанавливает процессор 4, ОЗУ 5, ПЗУ 6, обнуляет АЦП 7, блок ввода-вывода дискретных сигналов БВВ 8.
Микропроцессорная система работает в соответствии с командами и константами, записанными в ПЗУ 6.
По приходу синхроимпульса СИ (фиг.3, блок 10) в блоке 11 определяют разность Δu между заданным uЗ и текущим ud напряжениями выходного фильтра и вводят в регулятор (блок 12), который в зависимости от величины этой разности определяет амплитуду А тока источника переменной э.д.с., определяющего выходное напряжение ud четырехквадрантного преобразователя. В блоке 13 номеру первого из m интервалов присваивают значение единицы, а в блоке 14 определяют значение, которого должен достичь ток на заданном интервале по формуле
,
где А - сигнал с выхода регулятора; k - номер интервала. Если значение тока источника переменной э.д.с. меньше по абсолютной величине необходимого значения тока на заданном интервале (блок 15), то в положительном полупериоде источника переменной э.д.с. (блок 16), если установлен признак С=1 (блок 17), т.е. ток на предыдущем интервале достиг заданного значения, обнуляют признак С (блок 18) и включают транзисторы T2 или T3 преобразователя (блок 19), в отрицательном полупериоде включают транзисторы T1 или T4 преобразователя (блок 22), прикладывая к источнику переменной э.д.с. переменную э.д.с., после чего в блоке 23 процессор 4, опрашивая АЦП 7, определяет превышение током источника переменной э.д.с. необходимого на данном интервале значения, при этом устанавливают признак С=1 (блок 24) и выключают (блок 25) ранее включенные транзисторы, прикладывая тем самым к источнику переменной э.д.с. разность переменной э.д.с. и напряжения емкости выходного фильтра. Если в начале интервала значение тока превышает (по модулю) заданное значение (блок 15), то транзисторы не включают (блок 25) и сразу прикладывают к источнику переменной э.д.с. разность переменной э.д.с. и напряжения выходного фильтра.
Если признак С не установлен (С=0, блоки 17, 20), т.е. ток не достиг заданного значения на предыдущем интервале, то в положительном полупериоде источника переменной э.д.с. включают транзисторы T2 и T3 (блок 26) четырехквадрантного преобразователя, а в отрицательном - T1 и T4 (блок 27), прикладывая к источнику переменной э.д.с. сумму переменной э.д.с. и напряжения выходного фильтра, после чего выполняют блоки 23-25 и процессор переходит в режим ожидания следующего синхроимпульса (блок 28).
По приходу из блока формирования прерываний 3 очередного запроса прерывания процессор увеличивает значение k на единицу (блок 29) и повторяет алгоритм блоков 14-28 для следующего k-го интервала.
При появлении очередного синхроимпульса СИ, соответствующего окончанию текущего и началу следующего полупериода источника переменной э.д.с., алгоритм, приведенный на фиг.3, повторяют.
Блок формирования прерываний 3, процессор 4, ОЗУ 5, ПЗУ 6 и АЦП 7 могут быть интегрированы в специализированный контроллер, например М167-1С (см. каталог продукции «Бортовая промышленная электроника» АО «Каскод», 105037 Москва, Измайловская пл., 7).
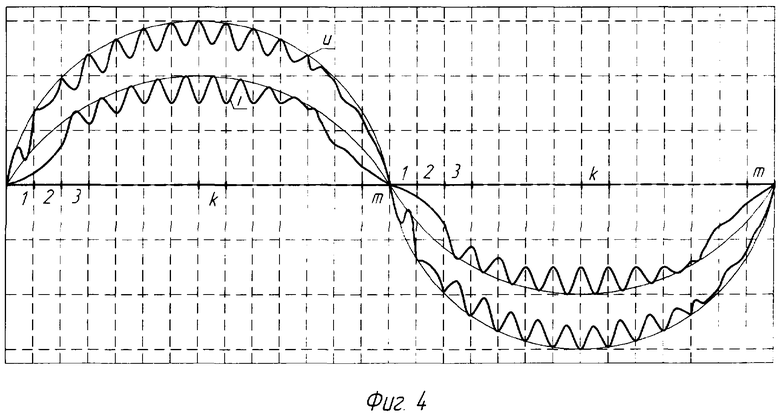
На фиг.4, 5 приведены временные диаграммы реализации прототипа (фиг.4) и данного способов управления на испытательном стенде ОАО «ВЭлНИИ».
Из диаграммы видно, что при управлении способом-прототипом (фиг.4) ток на 1-м и 2-м интервалах не достигает заданного значения и первая гармоника тока сдвигается относительно гармоники напряжения. В то же время при управлении предлагаемым способом (фиг.5) этот сдвиг значительно меньше, что обеспечивает более высокий коэффициент мощности, чем способ-прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2289193C1 |
| СПОСОБ ФОРМИРОВАНИЯ СЕТЕВОГО ТОКА ЧЕТЫРЕХКВАДРАНТНОГО ПРЕОБРАЗОВАТЕЛЯ | 2009 |
|
RU2419950C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2315415C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2003 |
|
RU2261519C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЁХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ФОРМИРОВАНИЕМ МОДУЛИРУЮЩЕГО СИГНАЛА | 2008 |
|
RU2396690C1 |
| СПОСОБ ПРОГНОЗИРУЮЩЕГО ВЕКТОРНОГО РЕГУЛИРОВАНИЯ ЧЕТЫРЕХКВАДРАНТНОГО ПРЕОБРАЗОВАТЕЛЯ | 2004 |
|
RU2284635C2 |
| СПОСОБ УПРАВЛЕНИЯ ПАРАЛЛЕЛЬНОЙ РАБОТОЙ ЧЕТЫРЕХКВАДРАНТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2005 |
|
RU2305361C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИНХРОНИЗИРУЮЩЕГО СИГНАЛА | 2004 |
|
RU2262189C1 |
| СПОСОБ АСИНХРОННОГО УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2450412C1 |
Использование: в преобразовательной технике в качестве повышающего напряжение преобразователя, в частности, как входной преобразователь тягового электропривода электровозов переменного тока. Сущность: повышение коэффициента мощности преобразователя достижением входным током необходимых значений на всех интервалах преобразования, при этом, при малых значениях питающего напряжения и недостижением входным током необходимого значения на предыдущем интервале преобразования, ток на следующем интервале формируется суммой входного и выходного напряжений. Технический результат - повышение технико-эксплуатационных показателей электровоза. 5 ил.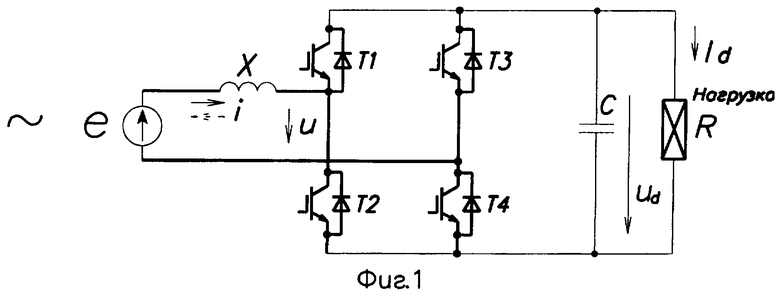
Способ управления четырехквадрантным преобразователем, заключающийся в том, что регулируют ток источника переменной э.д.с. изменением продолжительности времени приложения к нему переменной э.д.с. и разности переменной э.д.с. и напряжения емкости выходного фильтра, для чего полупериод питающего напряжения разбивают на т равных интервалов, в начале каждого полупериода переменной э.д.с. определяют разность между заданным и текущим напряжениями емкости выходного фильтра, вводят эту разность в регулятор, определяют для каждого из т интервалов заданное значение тока источника переменной э.д.с. по формуле
 ,
,
где А - сигнал с выхода регулятора;
k - номер интервала,
в начале каждого интервала прикладывают к источнику переменной э.д.с. переменную э.д.с., пока ток источника переменной э.д.с. меньше по модулю заданного значения тока на этом интервале, после чего до конца интервала прикладывают к источнику переменной э.д.с. разность переменной э.д.с. и напряжения емкости выходного фильтра, если в начале интервала ток источника переменной э.д.с. по модулю больше заданного значения, то к источнику сразу прикладывают разность переменной э.д.с. и напряжения емкости выходного фильтра, отличающийся тем, что если ток источника переменной э.д.с. не достиг заданного значения до конца интервала, то в начале следующего интервала прикладывают к источнику переменной э.д.с. сумму переменной э.д.с. и напряжения емкости выходного фильтра.
| УНИВЕРСАЛЬНЫЙ МОДУЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2231907C2 |
| СПОСОБ УПРАВЛЕНИЯ ОБРАТИМЫМ ПРЕОБРАЗОВАТЕЛЕМ ЭНЕРГИИ ПЕРЕМЕННОГО ТОКА В ЭНЕРГИЮ ПОСТОЯННОГО ТОКА | 2001 |
|
RU2216845C2 |
| СПОСОБ ОЦЕНКИ УГЛОВЫХ НЕВЯЗОК КОМПЛЕКСА ПОДГОТОВКИ И ОЦЕНКИ ТОЧНОСТИ НАЧАЛЬНОЙ ВЫСТАВКИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2001 |
|
RU2191350C2 |

