Область техники, к которой относится изобретение
Настоящее изобретение относится к области техники устройств, приводимых в движение электродвижущей силой, и, в частности, к области систем привода электрических тележек и самодвижущихся устройств.
Описание известного уровня техники
В настоящее время устройства, приводимые в действие электродвигателями, как, например, тележки, вилочные погрузчики или платформы для транспортировки грузов, товаров, поддонов, тарных ящиков и т.д., подъемные приспособления и самодвижущиеся приборы, как, например, подвижные рентгеновские установки, находят применение в различных областях промышленности и торговли.
Такие устройства обычно приводятся в движение одним или несколькими приводными колесами с приводом от электродвигателей, при этом оператор имеет возможность выбирать функции пуска/останова/, движения вперед/назад и, в некоторых случаях, скорость передвижения. Этот тип устройств обслуживается оператором, стоящим на полу, который управляет направлением и, где это приемлемо, скоростью передвижения при помощи средства управления, соответствующего упомянутым функциям. Средство управления обычно располагается на рычаге или штанге, которые, чтобы направлять устройство влево или вправо, обычно соединены с рамой или платформой, при этом рама или платформа имеет одно или несколько колес, которые свободно вращаются и соединены, с возможностью поворота, с передней или задней частью корпуса устройства, так что смещение штанги или рычага вправо или влево вызывает поворот устройства вправо или влево.
Эти обычные устройства, хотя они и очень полезные, имеют несколько недостатков.
В этом отношении первым недостатком обычных устройств является то, что, в результате выполнения операций поворота вправо или влево посредством ручной установки направления колес свободного хода, оказывается усложненной возможность выполнения поворотов в ограниченных пространствах. Кроме того, с этим типом устройства также оказывается относительно сложным передвижение с соответствующей скоростью, и, следовательно, для безопасного и аккуратного обращения необходимо обучение обращению.
В заявке на европейский патент ЕР 0253333 описывается система управления для подачи энергии на колеса с независимым приводом механизированной транспортной тележки для транспортировки медицинского диагностического оборудования. Рукоятка с ручным включением установлена на тележке в таком положении, что человек может прикладывать усилие руки к рукоятке в том направлении, в котором он хочет, чтобы тележка перемещалась. Датчики силы соединены с рукояткой для восприятия усилия рук, приложенного к ней в плоскости, параллельной плоскости, в которой тележка должна двигаться. Датчики силы вырабатывают сигналы, представляющие величину и направление усилия рук, приложенного к рукоятке в прямом, обратном направлении и в направлении поворота. Электронные схемы подключены к датчикам силы для вырабатывания сигналов управления для двигателей, приводящих во вращение колеса тележки для независимого управления направлением и скоростью движения тележки.
Признаки, известные в комбинации из этого европейского патента, помещены в преамбуле независимого пункта 1 формулы изобретения.
Задача изобретения
Задача настоящего изобретения заключается в устранении вышеупомянутых недостатков при помощи системы, которая позволяет осуществлять управляемую работу устройства, приводимого в движение электродвигателем, которым легко управлять без какой-либо необходимости в интенсивном обучении, которое можно поворачивать в ограниченных пространствах и которое, несмотря на то что оно является активным механизированным элементом, работает с некоторой пассивностью, которая переводится в ощущение тяжеловесности для оператора, делающая обращение оператора с устройством интуитивным, очень точным, легким и быстрым.
Описание изобретения
В соответствии с изобретением вышеупомянутые задачи решаются при помощи системы для управляемой работы устройства, приводимого в движение электродвигателем, которая содержит, по меньшей мере, два приводных колеса, установленных на противоположных концах оси, приводимых в движение электродвижущим средством, и средство управления для управления приведением в движение приводных колес, в которой каждое приводное колесо приводится в движение независимым электродвигателем, и тем, что каждый электродвигатель снабжен независимым средством управления. В соответствии с изобретением это средство управления для каждого электродвигателя содержит независимый усилитель мощности, который усиливает электрические сигналы, создаваемые посредством датчиков, и подает электрическую энергию на электродвигатель. Средство датчиков определяет механическое усилие движений «от себя» и «на себя», приложенное пользователем к элементу с возвратно-поступательным перемещением, и преобразует упомянутое механическое усилие в электрические сигналы, указывающие на степень усилия (например, сильная, очень сильная или слабая) в направлении (вперед или назад) механического усилия, приложенного к упомянутому элементу с возвратно-поступательным перемещением. Усилитель усиливает сигналы в соответствии с коэффициентом усиления в единицах массы устройства и подает на электродвигатель, так что он приводит в действие приводное колесо в соответствии с крутящим моментом, соответствующим движению, определяемому посредством датчиков. Средство датчиков, которое управляет каждым электродвигателем, может работать отдельно таким образом, что каждое приводное колесо может селективно приводиться в движение.
В предпочтительном варианте выполнения изобретения система имеет два колеса, причем каждое приводится в движение своим собственным электродвигателем, а также первое средство управления для первого электродвигателя и второе независимое средство управления для второго электродвигателя. В соответствии с этим вариантом выполнения первое средство управления содержит первое средство датчиков, необходимое для первого средства с возвратно-поступательным перемещением, и второе средство управления содержит второе средство датчиков, необходимое для второго средства с возвратно-поступательным перемещением. Предпочтительно, чтобы первый и второй элементы с возвратно-поступательным перемещением были соединены между собой соединительным элементом, подсоединенным таким образом, чтобы движения «на себя» или «от себя» соединительного элемента пользователем могло селективно воздействовать на первый или второй элемент с перемещением «от себя».
В предпочтительном варианте выполнения изобретения соединительным элементом является рукоятка, концы которой воздействуют соответственно на соответствующие элементы с возвратно-поступательным перемещением, которые, в свою очередь, воздействуют на соответствующие датчики. С таким устройством достигается то, что, в результате движения рукоятки «от себя» или «на себя», оператор может производить маневрирование особенно легким и удобным образом. Таким образом, когда рукоятка расположена на задней части устройства и оператор желает начать движение вперед, ему необходимо только захватить рукоятку обеими руками, одну руку на левую часть рукоятки, а другую - на ее правую часть, и двигать ее «от себя» с одинаковым усилием обеих рук. В результате этого концы рукоятки будут прикладывать одинаковое давление на два датчика, которые будут передавать электрические сигналы, соответствующие их средствам управления, так что оба электродвигателя будут вращаться с одинаковой скоростью. Если оператор желает повернуть вправо, он с большой силой двигает «от себя» рукоятку левой рукой, так что средство управления на левой стороне дает команду электродвигателю на левой стороне вращаться с большей скоростью, чем электродвигатель на правой стороне, и, следовательно, левое приводное колесо вращается быстрее, чем правое, и, если он желает повернуть налево, он с большей силой двигает «от себя» рукоятку правой рукой, в этом случае средство управления правой стороны и, следовательно, электродвигатель правой стороны и правое приводное колесо работают так, как было описано выше в отношении маневрирования с поворотом вправо. Если оператор желает начать движение в обратном направлении, он двигает рукоятку «на себя», вместо движения «от себя», так же, как было описано выше в отношении движения вперед.
Если оператор желает развернуть устройство, он двигает «от себя» рукоятку рукой, которая противоположна направлению поворота, и одновременно двигает «на себя» рукоятку другой рукой. В этом случае двигатель и, следовательно, приводное колесо стороны, на которой оператор двигает «на себя» рукоятку, вращаются в обратном направлении, тогда как приводное колесо на стороне, на которой оператор двигает рукоятку «от себя», вращается в противоположном направлении, тем самым позволяя устройству полностью развернуться.
Аналогично, оператор может выбрать скорость передвижения простым движением рукоятки «от себя» или «на себя» с изменяемым усилием.
В предпочтительном варианте выполнения системы изобретения каждое средство управления также содержит первое средство предварительного усилителя, которое усиливает электрические сигналы, вырабатываемые средством датчиков, как функцию определенного усилия движения «от себя» или «на себя», которое подает предварительно усиленные сигналы на усилитель мощности, который подает энергию на приводное колесо. В этом предпочтительном варианте выполнения также является особенно полезным то, что каждое средство управления содержит также для каждого усилителя мощности схему обратной связи, которая сравнивает, посредством средства компаратора, действительную величину электрической энергии, подаваемой на электродвигатель, с предварительно установленной величиной электрической энергии, необходимой для достижения движения приводного колеса, и преобразует обнаруженную разность, - которая возникает, например, когда приводное колесо находится на уклоне вперед или назад, - между действительной величиной и предварительно установленной величиной в сигналы ошибки, посредством которых изменяются входные электрические сигналы на усилитель мощности для того, чтобы последний подавал необходимую энергию на электродвигатель для его вращения на основе крутящего момента, необходимого для выполнения движения, определяемого посредством датчиков. Таким образом, достигается то, что неровность поверхности, по которой передвигается устройство, автоматически компенсируется, насколько это касается ее возможного влияния на движение устройства, и движение, поэтому, равномерное. Соответственно, каждая схема обратной связи содержит второе средство предварительного усилителя, которое усиливает сигналы ошибки.
В особенно предпочтительном варианте выполнения системы согласно изобретению последняя встроена в подвижную рентгеновскую установку. Хорошо известно, что эти установки очень тяжелые (обычно 400-600 кг) и часто должны быть способны к маневрированию в очень ограниченных пространствах персоналом, не приученным к частому обращению с этим типом устройств.
В соответствии с изобретением вычисляется коэффициент усиления, применяемый в усилителе мощности, так что сохраняется отношение между массой приводимого в движение устройства и приложением пользователем приемлемого усилия на элементы с возвратно-поступательным перемещением.
В качестве датчиков для определения приложенного оператором усилия движения «от себя» и «на себя» можно использовать тензодатчики (например, измеряющие растяжение приборы), определители давления, а также пьезоэлектрические, оптические, магнитные, емкостные и резистивные датчики.
В качестве усилителей мощности можно использовать стандартные измерительные усилители и предварительные усилители для входных сигналов, например, предлагаемые фирмой «Аналог дивайс» (Analogue Device).
Описание чертежей
Ниже описывается изобретение на основе варианта выполнения, показанного на прилагаемых чертежах, которые образуют неотъемлемую часть этого описания изобретения, на которых:
на фиг.1 показана блок-схема, на которой изображены основные электронные и электрические элементы системы изобретения в варианте выполнения, применимом к устройству, приводимому в движение двумя приводными колесами;
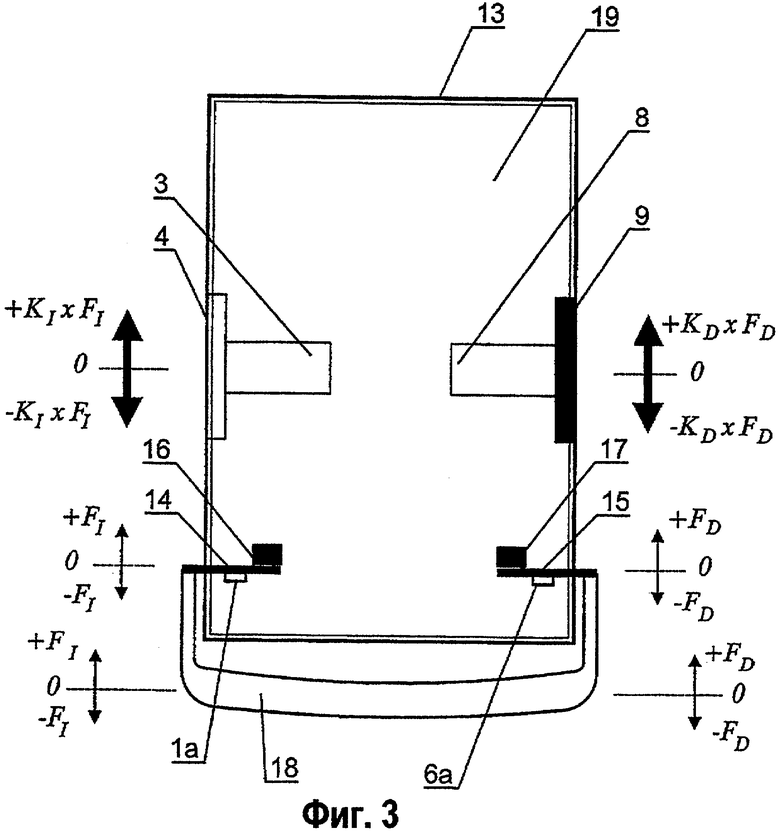
на фиг.2 - блок-схема, соответствующая фиг.1, основных элементов, связанных с управлением левостороннего приводного колеса;
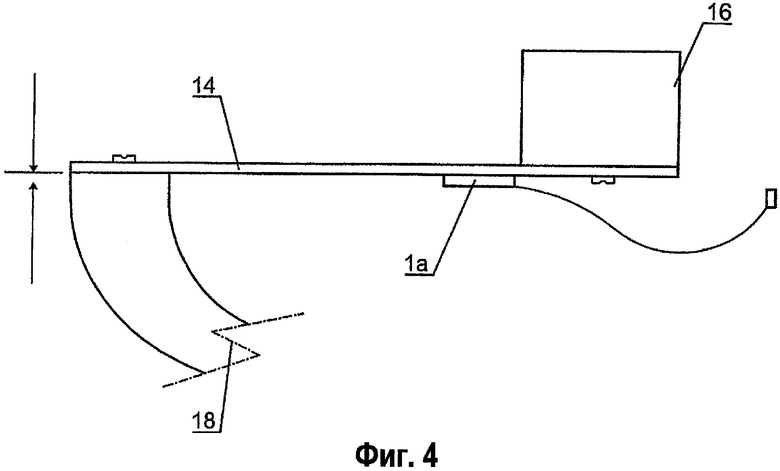
на фиг.3 - схематический вид сверху наиболее важных составляющих системы в варианте выполнения, изображенном на фиг.1;
на фиг.4 - схематический вид расположения рукоятки, левостороннего датчика силы и левостороннего элемента с возвратно-поступательным перемещением, показанных на фиг.3.
Описание предпочтительного варианта выполнения изобретения
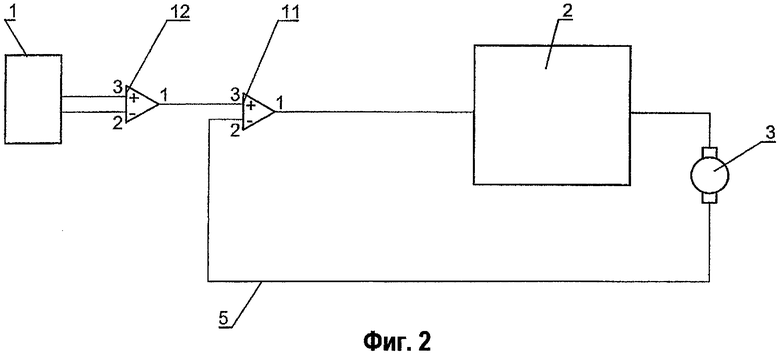
Как показано на фиг.1, система содержит датчик силы 1, который определяет прикладываемое оператором механическое усилие движения «от себя» +FI или движения «на себя» -FI и передает сигналы, указывающие на определенные усилия, на усилитель мощности 2. Усилитель 2 усиливает сигнал с коэффициентом усиления KI и подает результирующую электрическую энергию на левый двигатель 3 постоянного тока, который приводит в действие левое приводное колесо 4. Схема обратной связи 5, которая измеряет ток двигателя, пропорциональный крутящему моменту, определяет любую разность между номинальной величиной и действительной величиной и вырабатывает, в случае наличия разности между этими величинами, сигнал ошибки, который подается на усилитель 2 в дополнение к сигналу, принимаемому от датчика силы 1. На фиг.1 также показано расположение элементов для управления и приведения в движение правого колеса, включающих правый датчик силы 6, который определяет прикладываемое оператором усилие движения «от себя» +FD или движения «на себя» -FD, правый усилитель 7, правый электродвигатель 8, правое приводное колесо 9 и правую схему обратной связи 10. Для приведения в движение левого колеса предусматривается совершенно аналогичное расположение элементов.
Как показано на фиг.2, левосторонняя схема обратной связи 5 содержит предварительный усилитель 11 для сигнала ошибки и другой предварительный усилитель 12 для сигнала, принимаемого от датчика силы 1. Расположение, показанное на фиг.2, для левой стороны совершенно аналогично расположению элементов на правой стороне (не показано на фиг.2).
На фиг.3 показано расположение:
- датчиков силы 1, 6, включающих измеряющие растяжение приборы («Вишей» (Vishay)) 1a, 6a;
- электродвигателей 3, 8;
- приводных колес 4, 9 в подвижной рентгеновской установке 13;
- элементов с возвратно-поступательным перемещением 14, 15, содержащих пружинящие металлические полосы, закрепленные в соответствующих крепежных деталях 16, 17 рамы установки 13, причем упомянутые элементы с возвратно-поступательным перемещением соединены друг с другом, на их внешних концах, при помощи рукоятки 18.
Также может быть принято во внимание, что в варианте выполнения, изображенном на фиг.3, источником питания является комплект перезаряжаемых батарей 19.
На фиг.4 подробно изображено расположение датчика силы 1а, элемента с возвратно-поступательным перемещением 14 и его крепежной детали 16, а также рукоятки 18.
Из фиг.3 и 4 можно сделать вывод, что, когда пользователь двигает «на себя» или «от себя» рукоятку 18, то это приводит к пружинящей деформации вперед или назад соответствующей полосы 14, 15, причем эта деформация определяется соответствующим измеряющим растяжение прибором 1а, 6а и преобразуется в электрический сигнал в соответствии с тем, как было описано выше. Вследствие гибкости полос 14, 15, когда пользователь не двигает «на себя» или «от себя» рукоятку, оставленную свободно специально или случайно, полоса возвращается в свое положение останова, и, в результате, движение установки останавливается.
Вариант выполнения, изображенный на чертежах, может быть применим, в качестве примера, к самодвижущейся подвижной рентгеновской установке массой примерно 400 кг. В этом случае могут быть использованы два электродвигателя GSC 3, 8, каждый мощностью 500 Вт и крутящим моментом 15 Нм, два усилителя мощности «Аналог дивайс», каждый мощностью 500 Вт, которые включают предварительные усилители 11, 12 левой схемы обратной связи 5 и предварительные усилители (не показаны) правой схемы обратной связи 10. Для того чтобы обеспечить ощущение пользователем тяжеловесности, которое позволяет ему двигать «к себе» и «от себя» установку с большей безопасностью, было вычислено, что он должен прикладывать усилие, в отношении каждой руки, от 0 кг (останов) до 4 кг при движении «от себя» +FI, +FD или «на себя» -FI, -FD, определяемые датчиками силы 1, 6. Усилители мощности 2, 7 умножают эти усилия движения «от себя» и «на себя» на коэффициенты усиления KI, KD, которые могут быть установлены, например, в предварительном усилителе 11, и подают соответствующую энергию на электродвигатели 3, 8, так что они могут приводить в движение колеса 4, 9 с необходимыми усилиями +KIFI, -KIFI, +KDFD, -KDFD. Если оператор перемещает установку по уклону вниз и двигает с максимальным усилием 4 кг, это приводит к тому, что установка будет перемещаться с максимально достигаемой скоростью. При движении установки по плоскому полу или по уклону вверх максимальная скорость снижается, чтобы получить большую движущую силу. В зависимости от приложенного усилия оператор может, поэтому, регулировать скорость передвижения по каждой поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕНТГЕНОВСКАЯ АППАРАТУРА | 2003 |
|
RU2316156C2 |
| ВЫСОКОВОЛЬТНЫЙ, ВЫСОКОЧАСТОТНЫЙ И ВЫСОКОМОЩНЫЙ ТРАНСФОРМАТОР | 2014 |
|
RU2625909C2 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1972 |
|
SU444634A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
| УСОВЕРШЕНСТВОВАННЫЙ СИЛОВОЙ ПРИВОД КЛАПАНА | 2007 |
|
RU2461039C2 |
| РАМА ДЕТСКОЙ КОЛЯСКИ И ДЕТСКАЯ КОЛЯСКА | 2018 |
|
RU2776534C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С БЕСПРОВОДНОЙ СВЯЗЬЮ МЕЖДУ УСТРОЙСТВОМ УПРАВЛЕНИЯ И УДАЛЕННЫМ ДАТЧИКОМ | 2012 |
|
RU2621125C2 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
Изобретение относится к области техники устройств, приводимых в движение электродвижущей силой, и, в частности, к области систем привода электрических тележек и самодвижущихся устройств. Система для управляемой работы устройства содержит по меньшей мере два приводных колеса, приводимых в движение электродвижущим средством, в этой системе каждое из по меньшей мере двух приводных колес приводится в движение независимыми электродвигателями. Каждый электродвигатель получает электрическую энергию через независимый усилитель мощности, который усиливает электрические сигналы, создаваемые посредством датчиков. Система датчиков определяет механическое усилие, приложенное к элементу с возвратно-поступательным перемещением, и преобразует механическое усилие в электрические сигналы, которые указывают на степень и направление механического усилия, приложенного к элементу с возвратно-поступательным перемещением. Усилитель усиливает сигнал в соответствии с коэффициентом, который является функцией массы, которую тележка должна перемещать, и он подает энергию на электродвигатель, так что он может приводить в действие двигатель привода в соответствии с крутящим моментом, соответствующим движению, определяемому посредством датчиков. Технический результат - устранение недостатков при помощи системы, которая позволяет осуществлять управляемую работу устройства, приводимого в движение электродвигателем. 7 з.п. ф-лы, 4 ил.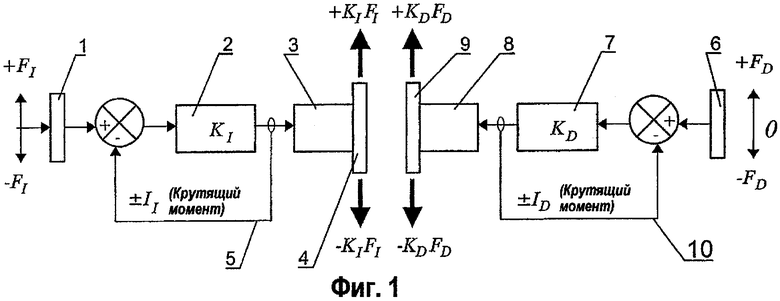
| RU 2060173 C1, 20.05.1996.EP 0253333 A1, 20.01.1988.DE 4011291, 17.10.1981.SU 1766725, 07.10.1992.GB 1263261, 09.02.1972. |

