I По авт.св. № 278371 известен сустав задающего органа дистанцией ного копирующего манипулятора с воспроизведением нагрузки исполнительного органа с помощью релейной следящей системы, содегкащий датчик управления положением исполнительного органа, датчик усилия нагрузки, приводной электро двигатель с необратимым механическим редуктором и датчик усилия оператора, выполненный из упругого деформируемого элемента и измерителя его деформаций.
Однако этот сустав не имеет устройства, вырабатывающего сигнал на изменение положения исполнительного органа в сторону движения руки, оператора по углу между выходным валом необратимого редуктора и звеном сустава, на котором установлен редуктор.
Целью изобретения является обеспечение в процессе манипулирования регулируемого в зависимости
от нагрузки рассогласования положения llcrloJшитeльнoгo и задакяцего органов манипулятора при сохранении жесткости исполнительного органа, а также снижение потребляемой мощности приводного электродвигателя суставав
Это достигается тем, что ротор датчика управления положением исполнительного органа закреплен на выходном валу необратимого механического редуктора, а статор « на звене сустава, на котором установлен редуктор.
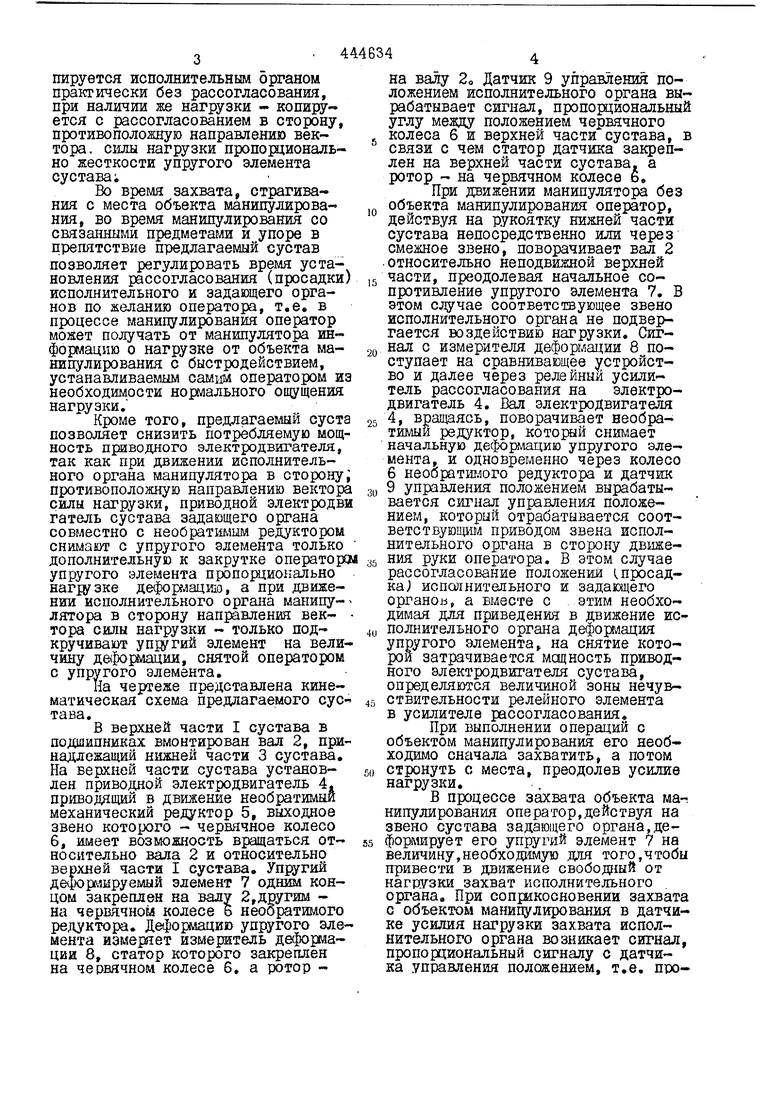
Предлагаемый сустав задающего органа позволяет автоматически регулировать в процессе манипулирования величину рассогласования Iпросадки) исполнительного и задаю щего органов манипулятора пропорционально нагрузке на исполнительном органе от объекта манипулировани, т.е. при отсутствии нагрузки на исполнительном орга| не положение задащего отэгана копируется исполнительным органом практически без рассогласования, при наличии же нагрузки - копируется с рассогласованием в сторону, противоположную направлению вектора, силы нагрузки пропорционально жесткости упругого элемента сустава; Во время захвата, страгивания с места объекта манипулирования, во время манипулирования со связанными предметами и упоре в препятствие предлагаемый сустав позволяет регулировать время установления рассогласования (просадки исполнительного и задающего органов по желанию оператора, т.е. в процессе манипулирования оператор может получать от манипулятора инфорлацпю о нагрузке от объекта манипулирования с быстродействием, устанавливаемым caMi-iM оператором и необходимости нормального ощущения нагрузки. Кроме того, предлагаемый сует позволяет снизить потребляемую мощ ность праведного электродвигателя, так как при движении исполнительного органа манипулятора в сторону противоположную направлению вектор силы нагрузки, приводной электродв гатель сустава задающего органа совместно с необратимым редуктором снимают с упругого элемента только дополнительную к закрутке оператор упругого элемента пропощиокально нагрузке деформацию, а при движении исполнительного органа манипулятора в сторону направления вектора силы нагрузки - только подкручивают упругий элемент на вели чину )орлации, снятой оператором с упругого элемента. На чертеже представлена кинематическая схема предлагаемого сус тава. В верхней части I сустава в подшипниках вмонтирован вал 2, при надлежащий нижней части 3 сустава. На верхней части сустава установлен приводной электродвигатель 4. приводящий в движение необратимый механический редуктор 5, выходное звено которого - червячное колесо 6, имеет возможность вращаться относительно вала 2 и относительно верхней части I сустава. Упругий деформируемый элемент 7 одним концом закреплен на валу 2,другим на червячной колесе ь необратимого редуктора. Дефорйлацию упругого эле мента измеряет измеритель дефорлации 8, статор которого закреплен на червячном колесе 6, а ротор на валу 2о Датчик 9 управления положением исполнительного органа вырабатывает сигнал, пропорциональный углу между положением червячного колеса 6 и верхней части сустава, в связи с чем статор датчика закреплен на верхней части сустава, а ротор - на червячном колесе ь, При движении манипулятора без объекта манипулирования оператор, действуя на рукоятку нижней части сустава непосредственно или через смежное звено, поворачивает вал 2 относительно неподвижной верхней части, преодолевая начальное сопротивление упругого элемента 7. В этом случае соответствующее звено исполнительного органа не подвергается юздействию нагрузки. Сигнал с измерителя деформации 8 поступает на сравнивающее устройство и далее через релейный усилитель рассогласования на электродвигатель 4. Вал электродвигателя 4, вращаясь, поворачивает необратимый редуктор, которой снимает начальную дес юрлацию упругого элемента, и одновременно через колесо 6 необратшлого редуктора и датчик 9 управления положением вырабатывается сигнал управления положением, который отрабатывается соответствующил приводом звена исполнительного органа в сторону движения руки оператора, В этом случае рассогласование положений (.просадка) испоинительного и задащего органоь, а вместе с эт1™ необходимая для приведения в движение исполнительного органа деформация упругого элемента, на снятие которои затрачивается модность приводного электродвигателя сустава, определяются величиной зоны нечувствительности релейного элемента в усилителе рассогласования. При выполнении операций с объектом манипулирования его необходимо сначала захватить, а потом стронуть с места, преодолев усилие нагрузки. В процессе захвата объекта манипулирования оператор,действуя на звено сустава задающего органа,дефорлшрует его упругий элемент 7 на величину,необходимую лля того,чтобы привести в движение свободный от нагрузки захват исполнительного органа. При соприкосновении захвата с объектом манипулирования в датчике усилия нагрузки захвата исполнительного органа возникает сигнал, пропорциональный сигналу с датчика управления положением, т.е. про54пощиояштьшй начальной дефорглацйи упругого элемента и равный по величине сигналу с изГЛерителя дефор,ш ции упругого элемента 8, но с обрат НЫ1Л знаком. Утот сигнал поступает на сравнивающее устройстю, где компенсирует сигнал с измерителя дефо 1лации упругого элемента. Оператор продолжает воздействовать на упругий элемент 7 сустава задакь щего органа,управляющего двшхением захвата, В измерителе деформации элемента вырабатывается сигнал больший, чем сигнал с датчика усилия нагрузки, на величину, пропорциональную дополнительной дефорлации упругого элемента 7. Этот сигнал поступает на сравнивающее устройство, которое вырабатывает сигнал рассогласования, поступающий на усилитель рассогласования, а с усилителя рассогласования на прово; ной электродвигатель 4 сустава задающего органа. Вал электродвигателя 4, вращаясь, поворачивает необратш.шй редуктор 5, который сншдаеа дополнительную дефор:,1ацию с упругого элемента у, и одновременно чере; червячное колесо 6 и датчик 9 уд- равления положершем вырабатывается сигнал управления положением до тех пор, пока после отработки сигнала управления положением приводем захвата исполнительного органа сигнал с датчика усилия нагрузки захвата исполвитального органа срав няется по величине с сигналом с изляерителя деформации 8 захвата сустава задающего органа. Этот процесс продолжается до установления необходшлого усилия захвата объекта манипулирования. При этом величи на рассогласования положения задающего и исполнительного органов автоматически устанавливается пропорционально усилию захвата объекта манипулирования и определяется закруткой упругого элемента 7 рукой оператора. Информацию об усилии захвата объекта манипулирования опе ратор получает по реакции от закрутки упругого элемента 7, которую производит он сам из условия нор(,1ального ощущения нагрузки. Таким образом, динагдические процессы воспроизведения нагрузки машинойманипулятором и ои1ущения нагрузки человоком-оператором сокмещаются во времени. При упоре в препятствие работа сустава аналогична работе сустава при захвате объекта манипулирования В процессе страгивания с места объекта манипулирования и в пшессе машшулирования со связанныи обвекта ш последовательность аботы элементов сустава та же, что при захвате объекта, с той лишь азнщей, что после вопроизведения агрузки от объекта манипулирования ля сообцения даижения манипулятору овместно с объектом манипулироваия оператор, воздействуя на упруие элементы соответствутацих звеньв суставов задающего органа, создает дополнительную де(|юрмацию. Эта деформация перерабатывается указанным выше способом в сигнал изменения положения, который отрабатываетая соответствующш,1и приводами звеньев исполнительного органа в сторону руки оператора. При этом задающий и исполнительный органы двигаются с рассогласованием по положению, которое автоматически устанавливается в процессе движения в соответствии с изменением нагрузки. В процессе движения манипулятора при несовпадении направлений вектора силы от нагрузки и движения руки оператора исполнительный электродв-игатель 4 сустава задающего органа работает в режиме снятия дефорлацш с упругого элемента 7, а при совпадении направлений - в решше восстановления дефорлации, снимаемой оператором с упругого элемента. В том и другом случае приращение дефорлации упругого элемента в ту и другую сторону, достаточное для приведения в движение манипулятора, определяется зоной нечувствительности релейного элемента усилителя рассогласования. При движении манипулятора нагрузка на руке оператора воспроизводится самим оператором, а приводной электродвигатель сустава только сопровождает упругий элемент, затрачивая энергию на создание только приращения дефорлации упругого элемента. В связи с этшл энергозатраты приводного электродвигателя сустава задащего органа, выполненного в соответствии с настоящим изобретением, значительно ниже. Предмет изобретения Сустав задающего органа дистанционного копирующего манипулятора по авт.св. Js 278371, отличающийся тем, что, с целью обеспечения в процессе манипулирования регулируемого в зависимости от нагрузки
4446348
рассогласования положения исполни-выходном валу необратимого механи-
тельного и задающего органов, роторческого редуктора, а статор ; датчика управления положением ис-на звене, на котором установлен реполнительного органа закреплен надуктор

| название | год | авторы | номер документа |
|---|---|---|---|
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
| Привод для сустава задающего органа копирующего манипулятора | 1974 |
|
SU511201A1 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1977 |
|
SU627959A1 |
| ЗАХВАТ ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1971 |
|
SU290825A1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1972 |
|
SU423624A1 |
| Устройство для управления манипу-ляТОРОМ | 1979 |
|
SU830292A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| СУСТАВ МАНИПУЛЯТОРА | 1972 |
|
SU428935A1 |

