Изобретения относятся к космической технике, а точнее к средствам монтажа двигательных систем на космических летательных аппаратах, и могут относиться к другим областям техники, где требуется высокая точность выставки оси двигателя, антенных устройств и др. параллельно оси изделия.
Из известного уровня техники близких средств (способов) и устройств для осуществления аналогичных способов выставки, подобных настоящим изобретениям, не выявлено.
Задачей настоящих изобретений является создание способа выставки оси маршевого двигателя (МД) параллельно оси космического аппарата (КА) с достижением технического результата в виде получения максимальной точности установки и параллельности осей КА и МД при отклонении этих осей от параллельности в одной плоскости и создание устройства для его осуществления.
Решение данной задачи достигается тем, что устройство для выставки оси МД параллельно оси КА содержит неподвижный и поворотный кронштейны, электропривод, проставку, соединяющую неподвижный кронштейн с электроприводом, внутри которой размещены полумуфты и крестовина, кинематически связывающие выходной вал электропривода с поворотным кронштейном, с устанавливаемым на нем МД, причем полумуфты, выходной вал электропривода и вал поворотного кронштейна снабжены торцевыми зубьями, при этом количество зубьев у выходного вала электропривода и его полумуфты отличается от количества зубьев вала поворотного кронштейна и его полумуфты на один зуб.
Решение данной задачи достигается также тем, что способ выставки оси МД параллельно оси КА заключается в том, что производят сборку неподвижного и поворотного кронштейнов, устанавливают эту сборку опорной поверхностью неподвижного кронштейна на горизонтальную поверхность оснастки, поворачивают выходной вал электропривода в среднее положение между двумя жесткими упорами, подавая напряжение на электропривод, и, удерживая его в этом положении, соединяют выходной вал электропривода с валом поворотного кронштейна с помощью полумуфт и крестовины, присоединяют электропривод через проставку к неподвижному кронштейну, обеспечивая отклонения от параллельности установочной плоскости поворотного кронштейна относительно опорной плоскости неподвижного кронштейна не более двух угловых градусов, определяют по квадранту отклонения от параллельности установочной плоскости относительно опорной плоскости при выборе люфта "по" (ϕ1) и "против" (ϕ2) часовой стрелки при приложении момента от руки (М), определяя направление со стороны выходного вала электропривода, определяют люфт (ϕл=ϕ1-ϕ2), определяют по формуле количество зубьев Z, на которое необходимо повернуть обе полумуфты относительно среднего положения выходного вала электропривода:

где:
 - сумма отклонении "по" и "против" часовой стрелки, деленная пополам;
- сумма отклонении "по" и "против" часовой стрелки, деленная пополам;
 - угол поворота установочной плоскости относительно опорной плоскости в угловых минутах, равный углу поворота полумуфт в одну и ту же сторону на один зуб;
- угол поворота установочной плоскости относительно опорной плоскости в угловых минутах, равный углу поворота полумуфт в одну и ту же сторону на один зуб;
ZТ1 - количество торцевых зубьев у выходного вала электропривода и сцепленной с ним полумуфты;
ZT2 - количество торцевых зубьев на валу подвижного кронштейна и сцепленной с ним полумуфты;
360 - угол полного оборота в угловых градусах;
60 - количество угловых минут в одном угловом градусе;
Х - целое число;
 - дробная часть числа меньше 0,5;
- дробная часть числа меньше 0,5;
 - дробная часть числа больше 0,5,
- дробная часть числа больше 0,5,
отсоединяют проставку вместе с электроприводом от неподвижного кронштейна, полумуфты выводят из зацепления с крестовиной и электропривод с закрепленными проставкой и полумуфтой снимают с оснастки, полумуфты отсоединяют от валов электропривода и поворотного кронштейна и поворачивают относительно среднего положения выходного вала электропривода, причем при отклонении от параллельности установочной плоскости от опорной плоскости "по" часовой стрелке поворачивают поворотный кронштейн и полумуфты на подсчитанное количество зубьев Z в ту же сторону, а при отклонении установочной плоскости "против" часовой стрелки, полумуфты и поворотный кронштейн поворачивают "против" часовой стрелки, при этом, если Z<X,5, поворачивают обе полумуфты на Х зубьев, если Z≥X,5, поворачивают обе полумуфты на (Х+1) зуб, и соединяют полумуфты в таком положении соответственно с валом электропривода и валом поворотного кронштейна, сохраняя первоначальное положение полумуфт относительно крестовины, проверяют отклонение от параллельности (ϕ) установочной плоскости относительно опорной плоскости при приложении к поворотному кронштейну момента от руки, которое должно быть не более

где:

при получении минимального допустимого отклонения закрепляют проставку с электроприводом на неподвижном кронштейне, выставляют КА по реперным точкам с помощью теодолита, снимают с оснастки выставленное на ней устройство и монтируют его на базовую плоскость КА, устанавливают на установочную плоскость поворотного кронштейна МД, определяют отклонения оси МД по показаниям квадранта относительно выставленной по реперным точкам оси КА и при отклонении за установленные пределы корректируют отклонения за счет поворота полумуфт.
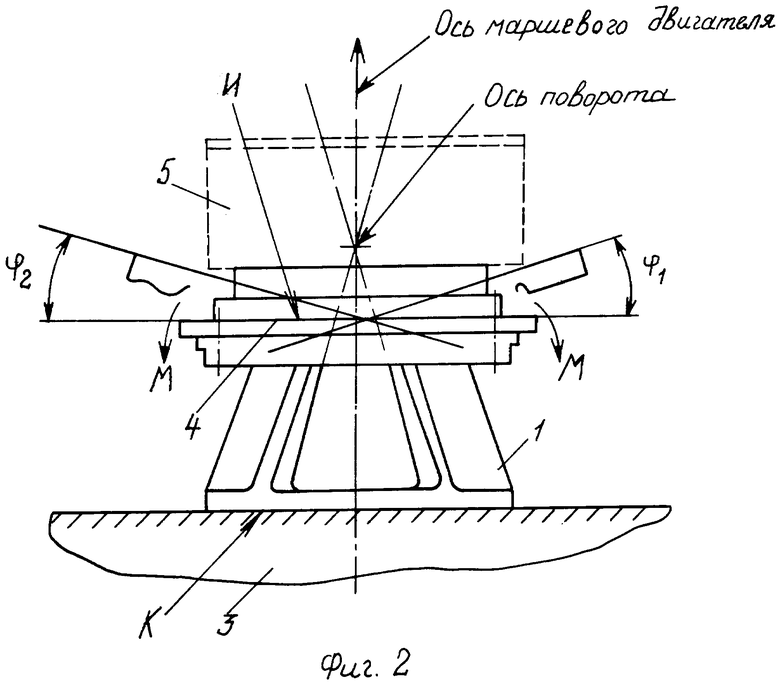
Далее предлагаемый способ и устройство поясняются более подробно с использованием прилагаемых графических материалов, где на фиг.1 показан общий вид устройства для выставки оси МД параллельно оси КА, на фиг.2 - отдельный момент, поясняющий способ.
Устройство для выставки оси МД параллельно оси КА содержит неподвижный кронштейн 1 с опорной плоскостью "К" для установки его на базовую плоскость "Л" КА (поз.2 на фиг.1) или какой-либо оснастки (поз.3 на фиг.2), поворотный кронштейн 4 с установочной плоскостью "И" для установки на ней маршевого двигателя 5, электропривод 6, проставку 7, соединяющую неподвижный кронштейн 1 с электроприводом 6. Внутри проставки 7 размещены две зубчатые полумуфты 8 и 9, крестовина 10, кинематически связанная с выходным валом 11 электропривода и валом 12 поворотного кронштейна. Маршевый двигатель 5 устанавливается на плоскость "И" поворотного кронштейна 4 так, чтобы ось МД была перпендикулярна к плоскости "И". Выходной вал 11 электропривода 6, закрепленного через проставку 7 на неподвижном кронштейне 1, через зубчатые полумуфты 8 и 9, крестовину 10 и вал поворотного кронштейна 12 может поворачивать поворотный кронштейн 4 с неподвижно закрепленным на нем маршевым двигателем на угол α, ограниченный жесткими упорами, расположенными внутри электропривода 6. Поворотный кронштейн поворачивается в подшипниках 13 и 14, смонтированных в боковых стенках неподвижного кронштейна, т.е. поворотный кронштейн поворачивается внутри неподвижного. Зубчатые полумуфты 8, 9, выходной вал 11 электропривода 6 и вал 12 поворотного кронштейна 4 снабжены торцевыми зубьями, причем количество зубьев у выходного вала 11 электропривода 6 и его полумуфты 8, соединенных болтом 15, отличается от количества зубьев вала 12 поворотного кронштейна и его полумуфты 9, соединенных болтом 16 на 1 зуб. Болты 15 и 16 контрятся шайбами 17.
Способ выставки оси маршевого двигателя параллельно оси космического аппарата реализуется, например, следующим образом.
Производят сборку неподвижного и поворотного кронштейнов. Устанавливают эту сборку опорной поверхностью "К" неподвижного кронштейна на горизонтальную (выставленную в "горизонт") поверхность оснастки 3 (см. фиг.2). Поворачивают выходной вал электропривода в среднее положение между двумя жесткими упорами ( ), (где α - угол поворота от одного жесткого упора до другого), и, подавая напряжение на электропривод, удерживают его в этом положении.
), (где α - угол поворота от одного жесткого упора до другого), и, подавая напряжение на электропривод, удерживают его в этом положении.
Соединяют выходной вал электропривода с валом поворотного кронштейна с помощью полумуфт и крестовины, присоединяя электропривод через проставку к неподвижному кронштейну, обеспечивая отклонение от параллельности плоскости "И" поворотного кронштейна относительно плоскости "К" неподвижного кронштейна не более двух угловых градусов за счет поворота полумуфт.
Определяют по квадранту отклонения от параллельности плоскости "И" относительно плоскости "К" при выборе люфта "по" (ϕ1) и "против" (ϕ2) часовой стрелки при приложении момента М от руки (Фиг.2), определяя направление со стороны выходного вала электропривода.
Определяют люфт ϕл=ϕ1-ϕ2.
Определяют по формуле количество зубьев Z, на которое необходимо повернуть обе полумуфты:

где:
- сумма отклонений "по" и "против" часовой стрелки, деленная попалам;
 - угол поворота плоскости "И" относительно плоскости "К" в угловых минутах, равный углу поворота полумуфт в одну и ту же сторону на один зуб;
- угол поворота плоскости "И" относительно плоскости "К" в угловых минутах, равный углу поворота полумуфт в одну и ту же сторону на один зуб;
ZТ1 - количество торцевых зубьев у выходного вала электропривода и сцепленной с ним полумуфты;
ZТ2 - количество торцевых зубьев на валу подвижного кронштейна и сцепленной с ним полумуфты;
360 - угол полного оборота в угловых градусах;
60 - количество угловых минут в одном угловом градусе;
Х - целое число,
- дробная часть числа меньше 0,5;
- дробная часть числа больше 0,5.
Отсоединяют проставку вместе с электроприводом от неподвижного кронштейна, разъединяя выходной вал электропривода от вала поворотного кронштейна, полумуфты выводят из зацепления с крестовиной.
Электропривод с закрепленными проставкой и полумуфтой снимают с оснастки.
Полумуфты отсоединяют от валов электропривода и поворотного кронштейна и поворачивают относительно среднего положения выходного вала электропривода, причем при отклонении от параллельности плоскости "И" от плоскости "К" "по" часовой стрелке поворачивают полумуфты и поворотный кронштейн на подсчитанное количество зубьев Z в ту же сторону, а при отклонении плоскости "И" "против" часовой стрелки полумуфты и поворотный кронштейн поворачивают "против" часовой стрелки. При этом, если Z<X,5, поворачивают обе полумуфты на Х зубьев, если Z≥X,5, поворачивают обе полумуфты на (Х+1) зуб для обеспечения параллельности плоскостей "И" и "К".
Выходной вал электропривода с проставкой и полумуфтой соединяют с валом поворотного кронштейна, сохраняя первоначальное положение полумуфт относительно крестовины.
Проверяют отклонение от параллельности (ϕ) плоскости "И" относительно плоскости "К" при приложении к поворотному кронштейну момента от руки, которое должно быть не более 
где:
У - точность выставки.
Точность выставки (У) увеличивается при уменьшении до нуля и при увеличении до единицы.
При  точность выставки (У) подсчитывается по формуле:
точность выставки (У) подсчитывается по формуле:

При  поворот осуществляется на (Х+1) зуб, а смещение относительно подсчитанного количества зубьев составит:
поворот осуществляется на (Х+1) зуб, а смещение относительно подсчитанного количества зубьев составит:
Уточненная точность выставки (У1) при  и
и  подсчитывается по формуле:
подсчитывается по формуле:

Тогда фактическое отклонение от параллельности (ϕо) будет подсчитываться по формуле:

При получении минимального допустимого отклонения закрепляют проставку с электроприводом на неподвижном кронштейне.
Выставляют КА по реперным точкам с помощью теодолита, снимают с оснастки выставленное на ней устройство и монтируют его на плоскость "Л" КА, а на плоскость "И" поворотного кронштейна устанавливают маршевый двигатель.
И, наконец, определяют отклонения оси маршевого двигателя по показаниям квадранта, установленного на плоскость "Н" маршевого двигателя, относительно выставленной по реперным точкам оси КА и при отклонении за установленные пределы корректируют отклонения за счет поворота полумуфт с использованием вышеприведенных операций и формул, с учетом деления суммарного люфта пополам, и максимальной точностью.
Таким образом, фактически в данном изобретении предлагается выставлять ось маршевого двигателя относительно КА в два этапа.
- Первый этап включает выставку плоскости "И" поворотного кронштейна устройства для выставки оси маршевого двигателя относительно посадочной плоскости неподвижного кронштейна устройства, устанавливаемого на этом этапе на какой-то оснастке, не связанной непосредственно с КА, учитывая, что ось маршевого двигателя устанавливается перпендикулярно плоскости "И" поворотного кронштейна, на которую двигатель устанавливается.
Фактически на первом этапе производится выставка оси маршевого двигателя к посадочной плоскости "К" неподвижного кронштейна.
- На втором этапе окончательно выставляется ось маршевого двигателя с помощью квадранта, установленного на плоскость "Н" двигателя, относительно оси КА, выставленного с помощью теодолита.
Пример 1
ZT1=40 зубьев
ZT2=41 зуб
ϕ1=1°30'
ϕ2=1°

X=5
(Х+1)=(5+1)=6 - количество зубьев, на которое необходимо повернуть обе полумуфты

 , т.е.
, т.е. 
Точность выставки (У) при
равна:

Уточненная точность выставки (У1) без учета люфта равна:

Люфт равен: ϕл=ϕ1-ϕ2=1°30'-1°=30 угловых минут.
Отклонение от параллельности (ϕо) плоскости "И" относительно плоскости "К" с учетом половины люфта равно:

Примечание. Максимальное отклонение от параллельности (ϕо(мах)) плоскости "И" относительно плоскости "К" при: ZT1=40, ZТ2=41, ϕл=30 угловых минут, будет равно:

Пример 2
ZT1=40 зубьев
ZT2=41 зуб
ϕ1=70'
ϕ2=40'

X=4 - количество зубьев, на которое необходимо повернуть обе полумуфты

Точность выставки (У) при
равна:

Уточненная точность выставки (У1) без учета люфта равна:

Люфт равен: ϕл=ϕ1-ϕ2=70'-40'=30 угловых минут.
Отклонение от параллельности (ϕо) плоскости "И" относительно плоскости "К" с учетом половины люфта равно:

Пример 3
ZТ1=40 зубьев
ZT2=41 зуб
ϕ1=25'
ϕ2=-5'

Х=0
(Х+1)=1 зуб - количество зубьев, на которое необходимо повернуть обе полумуфты
 , т.е.
, т.е. 
Точность выставки (У) при равна:

Уточненная точность выставки (У1) без учета люфта:

Люфт равен: ϕл=ϕ1-ϕ2=25'-(-5')=30 угловых минут.
Отклонение от параллельности (ϕо) плоскости "И" относительно плоскости "К" с учетом половины люфта равно:

Пример 4
ZТ1=60 зубьев
ZТ2=61 зуб
ϕ1=1°30'
ϕ2=1°

Х=12
(Х+1)=(12+1)=13 зубьев - количество зубьев, на которое необходимо повернуть обе полумуфты

 , т.е.
, т.е. 
Точность выставки (У) при равна:

Уточненная точность выставки (У1) без учета люфта:

Люфт равен: ϕл=ϕ1-ϕ2=1°30'-1°=30 угловых минут.
Отклонение от параллельности (ϕо) плоскости "И" относительно плоскости "К" с учетом половины люфта равно:

Примечание. Максимальное отклонение от параллельности (ϕо(мах)) плоскости "И" относительно плоскости "К" при: ZT1=60, ZТ2=61, ϕл=30 угловых минут, будет равно:

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ДЛЯ ОБЛЁТА ЛУНЫ | 2015 |
|
RU2614464C2 |
| СПОСОБ ВЫСТАВКИ ОСИ ЧУВСТВИТЕЛЬНОСТИ МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 1972 |
|
SU1839886A1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 1999 |
|
RU2149109C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ КООРДИНАТ ИЗМЕРИТЕЛЬНОЙ ОСИ АКСЕЛЕРОМЕТРА | 1999 |
|
RU2164693C1 |
| УГЛОВАЯ ЗУБЧАТАЯ МУФТА ДЛЯ ПОДВИЖНЫХ ВАЛОВ | 2009 |
|
RU2418211C1 |
| Револьверный суппорт с горизонтальной осью револьверной головки | 1979 |
|
SU887069A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| Сверлильно-клепальный автомат | 1989 |
|
SU1660828A1 |
| СПОСОБ ВЫСТАВКИ ОСЕЙ ПОДВИЖНОГО ОБЪЕКТА | 2004 |
|
RU2320963C2 |
| Крестовина универсального шарнира с переменным углом между осями шипов (варианты) | 2023 |
|
RU2802379C1 |
Изобретения относятся к средствам монтажа двигательных систем преимущественно на космических аппаратах (КА). Предлагаемое устройство содержит неподвижный и поворотный кронштейны. Первый из них имеет опорную плоскость для установки на базовую плоскость КА и через проставку соединен с электроприводом (ЭП). Второй имеет установочную плоскость для маршевого двигателя. Выходной вал ЭП связан с поворотным кронштейном через полумуфты и крестовину, размещенные в проставке. Полумуфты, вал ЭП и вал поворотного кронштейна снабжены торцевыми зубьями. Число зубьев у вала ЭП и его полумуфты на единицу отличается от их числа у вала кронштейна и его полумуфты. Предлагаемый способ состоит в сборке обоих кронштейнов, ЭП и проставки и установке сборки на оснастку. С помощью ЭП производят небольшие (не более градусов) повороты вала поворотного кронштейна "по" и "против" часовой стрелки. Определяют непараллельность установочной и опорной плоскостей и люфт во вращательной паре, а также число зубьев, необходимое для поворота полумуфт от среднего положения вала ЭП. Полумуфты отсоединяют от валов ЭП и поворотного кронштейна и поворачивают относительно среднего положения вала ЭП. При непараллельности указанных плоскостей поворачивают поворотный кронштейн и полумуфты на специальным образом подсчитанное число зубьев в направлении "по" или "против" часовой стрелки. Затем полумуфты вновь соединяют с указанными валами, сохраняя их положение относительно крестовины. Вновь проверяют непараллельность плоскостей при приложении к поворотному кронштейну момента. При минимальном допустимом отклонении закрепляют проставку с ЭП на неподвижном кронштейне. Затем производят выставку и установку на КА маршевого двигателя, корректируя возможные отклонения за счет поворота полумуфт. Технический результат состоит в достижении максимальной точности установки и параллельности осей КА и маршевого двигателя. 2 н.п. ф-лы. 2 ил.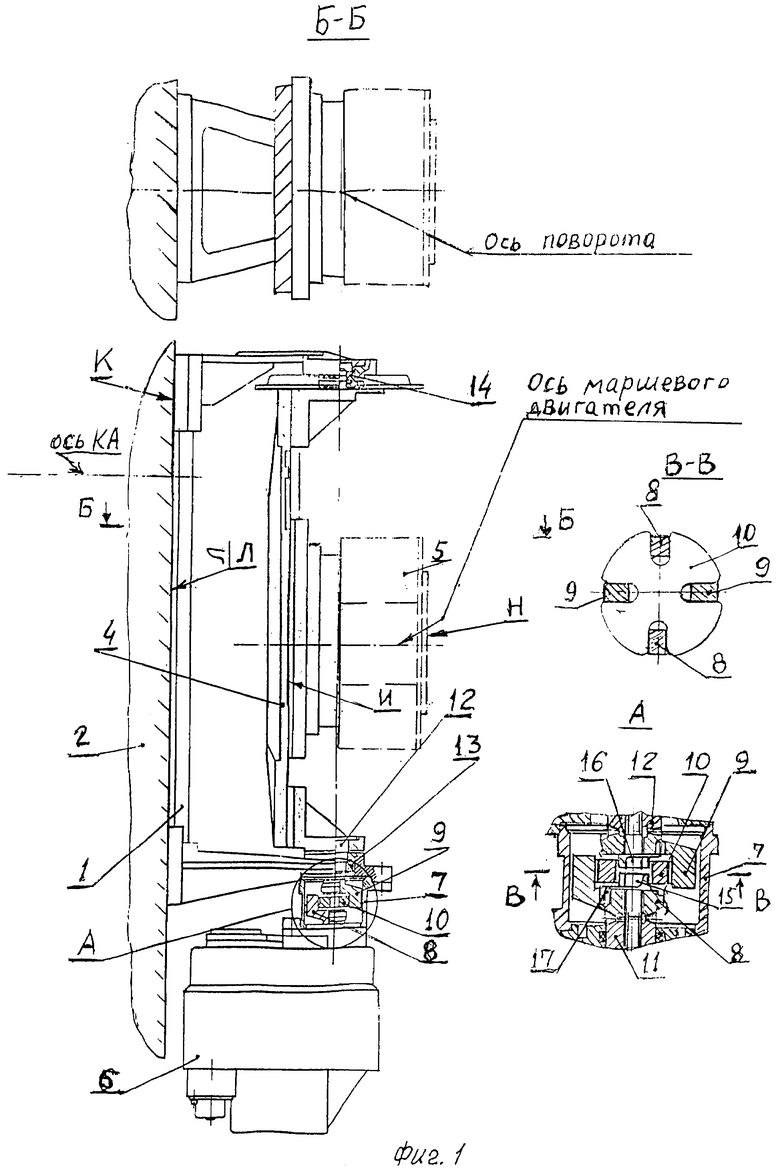
ϕЛ=ϕ1-ϕ2,
определяют количество зубьев Z, на которое необходимо повернуть обе полумуфты относительно среднего положения выходного вала электропривода, по формуле

где  - полусумма указанных отклонений по и против часовой стрелки,
- полусумма указанных отклонений по и против часовой стрелки,
 - угол поворота установочной плоскости относительно опорной плоскости в угловых минутах, равный углу поворота полумуфт в одну и ту же сторону на один зуб;
- угол поворота установочной плоскости относительно опорной плоскости в угловых минутах, равный углу поворота полумуфт в одну и ту же сторону на один зуб;
ZТ1 - количество торцевых зубьев у выходного вала электропривода и сцепленной с ним полумуфты;
ZТ2 - количество торцевых зубьев на валу подвижного кронштейна и сцепленной с ним полумуфты;
Х - целая часть числа,
 - дробная часть этого числа меньше 0,5;
- дробная часть этого числа меньше 0,5;
 - дробная часть этого числа больше 0,5,
- дробная часть этого числа больше 0,5,
отсоединяют проставку вместе с электроприводом от неподвижного кронштейна, полумуфты выводят из зацепления с крестовиной и электропривод с закрепленными проставкой и полумуфтой снимают с оснастки, полумуфты отсоединяют от валов электропривода и поворотного кронштейна и поворачивают относительно указанного среднего положения выходного вала электропривода, причем при отклонении от параллельности установочной плоскости относительно опорной плоскости по часовой стрелке, поворачивают поворотный кронштейн и полумуфты в ту же сторону на подсчитанное количество зубьев Z, при отклонении установочной плоскости против часовой стрелки полумуфты и поворотный кронштейн поворачивают против часовой стрелки, при этом если Z<X,5, то поворачивают обе полумуфты на Х зубьев, а если Z>Х,5, то поворачивают обе полумуфты на (Х+1) зуб, соединяют полумуфты в таком положении соответственно с валом электропривода и валом поворотного кронштейна, сохраняя первоначальное положение полумуфт относительно крестовины, проверяют отклонение от параллельности (ϕ) установочной плоскости относительно опорной плоскости при приложении к поворотному кронштейну момента вручную, которое должно быть не более

где  - точность выставки, при этом при получении минимального допустимого отклонения закрепляют проставку с электроприводом на неподвижном кронштейне, выставляют космический аппарат по реперным точкам с помощью теодолита, снимают с оснастки выставленное на ней устройство и монтируют его на базовую плоскость космического аппарата, а затем устанавливают на установочную плоскость поворотного кронштейна маршевый двигатель и определяют отклонения оси маршевого двигателя по показаниям квадранта относительно выставленной по реперным точкам оси космического аппарата и при отклонении за установленные пределы корректируют отклонения за счет поворота полумуфт.
- точность выставки, при этом при получении минимального допустимого отклонения закрепляют проставку с электроприводом на неподвижном кронштейне, выставляют космический аппарат по реперным точкам с помощью теодолита, снимают с оснастки выставленное на ней устройство и монтируют его на базовую плоскость космического аппарата, а затем устанавливают на установочную плоскость поворотного кронштейна маршевый двигатель и определяют отклонения оси маршевого двигателя по показаниям квадранта относительно выставленной по реперным точкам оси космического аппарата и при отклонении за установленные пределы корректируют отклонения за счет поворота полумуфт.
| Технология сборки и испытаний космических аппаратов | |||
| Под общ | |||
| ред | |||
| проф | |||
| И.Т.БЕЛЯКОВА и проф | |||
| И.А.ЗЕРНОВА | |||
| - М.: Машиностроение, 1990, с.273-277 | |||
| ДВИГАТЕЛЬНАЯ УСТАНОВКА И ПОДВЕС ДВИГАТЕЛЯ | 1997 |
|
RU2175935C2 |
| ТРАНСФОРМИРУЕМЫЙ ПРЕДМЕТ ОДЕЖДЫ | 2002 |
|
RU2214143C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1991 |
|
RU2021170C1 |

