Предлагаемое техническое решение относится к авиации и может быть использовано в спортивных и развлекательных целях.
Орнитоптеры - это летательные аппараты тяжелее воздуха, полет которых осуществляется с помощью машущих движений крыльев.
Известен летательный аппарат [Патент РФ №2014247], который включает корпус (фюзеляж) с шарнирно установленными крыльями, силовую установку, поворотную платформу с подъемным механизмом и гидравлический привод машущих движений. Его конструкция позволяет осуществлять маховые движения крыла в горизонтальной и вертикальной плоскостях. Однако данное решение направлено на использование машущих движений только в режиме взлета и посадки, а в режиме полета крылья зафиксированы и неподвижны. Такой летательный аппарат движется по самолетному варианту и, следовательно, не может быть отнесен к орнитоптерам.
Известен дельтаплан с машущими крыльями [Патент США №5170965], который содержит несущий остов, выполненный в виде рамы, состоящей из взаимно перпендикулярных балок, связанных стяжками. На раме закреплены крылья, хвостовая часть оперения и шасси. Крыло включает подпружиненный к раме лонжерон, на котором закреплена обшивка, растянутая на массивных латах. Конструкция такого летательного аппарата громоздка, обладает низкими аэродинамическими характеристиками, не позволяет быстро реагировать при изменении аэродинамических воздействий на крыло, а при попадании в противофазу направления движения (инерционного, вследствие парусности и веса) крыла и воздействия силы тяги может привести к остановке движения и, в конечном итоге, к поломке крыла.
Наиболее близким к заявляемому решению является летательный аппарат (патент РФ №2138424), представляющий собой орнитоптер, состоящий из корпуса (остова) с шарнирно установленными крыльями, силовой установки, содержащей энергоблок (баллон со сжатым газом) и два привода машущих движений (для каждого крыла отдельно), и двух блоков управления давлением, которые управляют соответствующими приводами машущих движений. Блок управления соединен с рычагом ручного управления крыльями. Привод машущих движений представляет собой пневмоцилиндр, шток которого соединен с кольцеобразной гибкой тягой. Гибкая тяга неподвижно закреплена на лонжероне соответствующего крыла, а на ней неподвижно закреплен блок управления давлением в камерах пневмоцилиндра, с которыми через соответствующие магистрали соединен баллон со сжатым газом силовой установки. Использование в данном решении пневматической силовой установки приводит к значительным потерям энергии и, следовательно, такой орнитоптер обладает невысокими энергосберегающими характеристиками. Для создания такой пневмосистемы необходимы нестандартные составляющие, что усложняет процесс производства орнитоптера. Данный летательный аппарат не обладает достаточной степенью надежности, поскольку управление движением каждого крыла осуществляется независимо друг от друга и существует опасность разбалансировки. Кроме того, существует опасность взрыва баллона со сжатым газом.
Заявляемое изобретение решает задачу создания простого, надежного орнитоптера с высокими энергосберегающими характеристиками.
Поставленная задача решается тем, что в орнитоптере, содержащем корпус с шарнирно установленными крыльями, силовую установку, состоящую из энергоблока и привода машущих движений, и блок управления приводом машущих движений, привод машущих движений состоит из жестко прикрепленного к корпусу гидроцилиндра, к штоку которого шарнирно прикреплены концы двух штанг, при этом их другие концы шарнирно соединены каждая с основанием соответствующего крыла, а энергоблок состоит из гидронасоса и двигателя, подключенного так, чтобы обеспечивать вращательное движение гидронасоса, причем гидронасос соединен подающим и обратным трубопроводами с блоком управления приводом машущих движений, который реверсивными трубопроводами соединен с двумя полостями гидроцилиндра.
В основу предложенного технического решение положено использование гидравлической силовой установки, что обеспечивает энергосберегающий режим работы данного летательного аппарата.
Надежность орнитоптера обеспечивается конструктивными особенностями силовой установки, а именно тем, что движение обоих крыльев задается движением штока одного гидроцилиндра, что обеспечивает синхронность, а также наличием двигателя в силовой установке, что обеспечивает долговременную работу и повышает безопасность полета, так как уменьшает роль человека в осуществлении полета.
Простота предложенного орнитоптера обусловлена тем, что в нем могут быть использованы стандартные конструкции, узлы и агрегаты, что упрощает процесс его производства.
На чертеже изображена функциональная схема орнитоптера.
Предлагаемый орнитоптер (фиг.1) содержит корпус 1, на котором с помощью шарниров 2 закреплены крылья 3, энергоблок силовой установки, состоящий из гидронасоса 4 с двигателем 5, привод машущих движений силовой установки, состоящий из жестко прикрепленного к корпусу 1 гидроцилиндра 6 с поршнем 7 и штоком 8, и двух штанг 9, одни концы которых шарниром 10 соединены со штоком 8 гидроцилиндра 6, а другие концы шарнирами 11 соединены каждый с основанием соответствующего крыла 3. Орнитоптер также содержит блок 12 управления приводом машущих движений, который соединен подающим 13 и обратным 14 трубопроводами с гидронасосом 4, а также реверсивными трубопроводами 15 с двумя полостями гидроцилиндра.
В качестве двигателя 5 может быть использован любой двигатель, который может обеспечить вращательное движение гидронасоса 4. Могут быть использованы и стандартные ДВС и двигатель Стирлинга, который обладает к тому же высоким КПД и является малошумящим.
В качестве блока 12 управления приводом машущих движений может быть использован стандартный гидрораспределитель (Учебник ″Гидравлика, гидромашины и гидроприводы″, Башта Т.М. и др., М.: Машиностроение, 1982 г., стр.358).
Орнитоптер работает следующим образом
После запуска силовой установки двигателем 5 и гидронасосом 4 создается рабочее давление в подающем трубопроводе 13. При этом гидрожидкость из гидронасоса 4 подается на блок 12 управления. На блок 12 управления поступает сигнал от пилота или от автоматической системы управления движением, задающий направление движения крыльев. По этому сигналу блок 12 подает через один из реверсивных трубопроводов гидрожидкость в соответствующую полость гидроцилиндра 6. Поршень 7 под воздействием давления, создаваемого поступившей гидрожидкостью, движется и толкает (тянет) шток 8, присоединенный через шарнир 10 к штангам 9, которые в свою очередь приводят в движение крылья 3. Таким образом, возвратно-поступательное движение штока 8 обеспечивает маховые движения крыльев.
| название | год | авторы | номер документа |
|---|---|---|---|
| Орнитоптер | 2023 |
|
RU2810824C1 |
| МАХОЛЁТ | 2014 |
|
RU2578389C1 |
| Махолет | 2017 |
|
RU2655582C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2138424C1 |
| МАХОЛЕТ | 2016 |
|
RU2659357C2 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2279374C1 |
| Механизм привода крыла орнитоптера | 1979 |
|
SU878652A1 |
Изобретение относится к области авиации. Орнитоптер содержит корпус с шарнирно установленными крыльями, силовую установку, состоящую из энергоблока и привода машущих движений крыла, и блок управления приводом машущих движений крыла. Привод машущих движений крыла состоит из жестко прикрепленного к корпусу гидроцилиндра, к штоку которого шарнирно прикреплены концы двух штанг, при этом их другие концы шарнирно соединены каждая с основанием соответствующего крыла. Энергоблок состоит из гидронасоса и двигателя. Гидронасос соединен подающим и обратным трубопроводами с блоком управления приводом машущих движений крыла, который реверсивными трубопроводами соединен с двумя полостями гидроцилиндра. Технический результат - упрощение конструкции. 1 ил.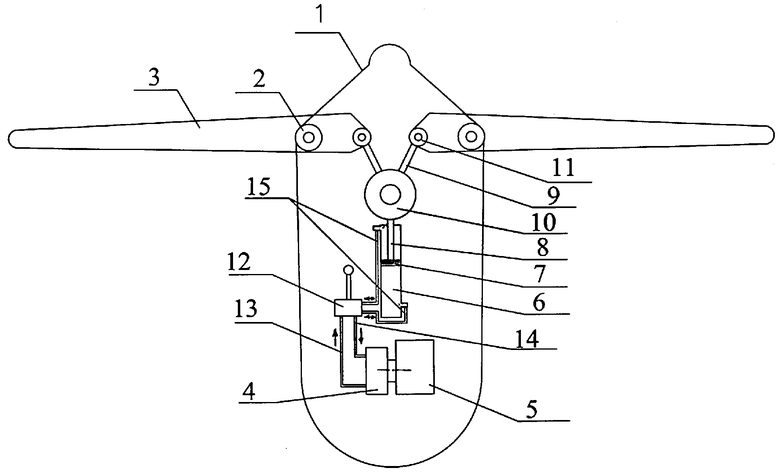
Орнитоптер, содержащий корпус с шарнирно установленными крыльями, силовую установку, состоящую из энергоблока и привода машущих движений крыла, а также блок управления приводом машущих движений крыла, отличающийся тем, что привод машущих движений крыла состоит из жестко прикрепленного к корпусу гидроцилиндра с поршнем и штоком и двух штанг, одни концы которых шарнирно соединены со штоком гидроцилиндра, а другие концы шарнирно соединены каждая с основанием соответствующего крыла, при этом энергоблок силовой установки состоит из гидронасоса и двигателя, подключенного так, чтобы обеспечивать вращательное движение гидронасоса, причем гидронасос соединен подающим и обратным трубопроводами с блоком управления, который реверсивными трубопроводами соединен с двумя полостями гидроцилиндра.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2138424C1 |

