Изобретение относится к измерительной технике и может быть использовано для непрерывного измерения и регистрации взаимного положения рельсовых нитей железнодорожного полотна в вертикальной плоскости в зависимости от пройденного расстояния.
Известно устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости (Авторское свидетельство СССР № 142776. Механизм для записи превышения одного рельса железнодорожного пути над другим. Авторы Плохоцкий М.А., Найдич А.М. // Бюл. Изобретений №22, 1961). Механизм для записи содержит измерительную колесную пару, подрессоренный кузов, гироскопический стабилизатор с рычагом, нижний конец которого жестко закреплен на выходной оси стабилизатора, трособлочную систему и регистрирующий блок с механической записью, причем гироскопический стабилизатор, трособлочная система и регистрирующий блок установлены на подрессоренном кузове, механически фиксированном на измерительной колесной паре.
Недостатком механизма записи является сложность конструкции, большие габариты и механическая запись с механической протяжкой бумажный ленты, что снижает точность определения измеряемого параметра.
Известно устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости, взятое за прототип. (Авторское свидетельство СССР № 1120166, МПК G 01 C 7/04. Арутюнов С.С., Хохлов В.М., Глебов В.А. и др. // Бюл. № 39, 23.10.1984г). Устройство содержит измерительную колесную пару, подрессоренный кузов, гироскопический стабилизатор с вертикальным рычагом, нижний конец которого жестко закреплен на выходной оси стабилизатора, трособлочную систему и регистрирующий блок, причем гироскопический стабилизатор, трособлочная система и регистрирующий блок установлены на подрессоренном кузове, механически фиксированном на измерительной колесной паре. Для упрощения конструкции и уменьшения габаритов, в него введен компенсирующий двуплечий рычаг, ось которого соединена шарнирно с верхним концом установленного вертикально рычага стабилизатора, верхний конец двуплечего рычага связан с регистрирующим блоком, а нижний конец соединен через трособлочную систему с буксами измерительной колесной пары. Чтобы исключить из показаний регистрирующего блока колебания подрессоренного кузова, отношение плеч компенсирующего двуплечего рычага соответствует равенству
где  длина плеча компенсирующего двуплечего рычага от его оси до нижнего конца рычага;
длина плеча компенсирующего двуплечего рычага от его оси до нижнего конца рычага;  длина плеча компенсирующего двуплечего рычага от его оси до верхнего конца рычага;
длина плеча компенсирующего двуплечего рычага от его оси до верхнего конца рычага;  расстояние между точками крепления гибких тросов трособлочной системы к буксам измерительной колесной пары;
расстояние между точками крепления гибких тросов трособлочной системы к буксам измерительной колесной пары;  длина рычага стабилизатора.
длина рычага стабилизатора.
При этом превышение одной рельсовой нити над другой и перемещение верхнего конца компенсирующего двуплечего рычага связаны масштабным коэффициентом

где  ширина рельсовой колеи.
ширина рельсовой колеи.
Недостатком прототипа является сложность конструкции регистрирующего блока механического типа с протяжкой бумажный ленты в зависимости от пройденного пути, его большие габариты, что снижает точность и надежность определения измеряемого параметра – превышения одного рельса над другим в вертикальной плоскости.
Техническим результатом изобретения является упрощение конструкции регистрирующего блока, повышение точности и надежности его работы.
Технический результат достигается тем, что в устройстве для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости, содержащем измерительную колесную пару, подрессоренный кузов, трособлочную систему, регистрирующий блок и установленный на корпусе кузова гироскопический стабилизатор, с выходной осью которого жестко связан вертикальный рычаг, верхний конец которого шарнирно соединен с компенсирующим двуплечим рычагом, нижний конец которого кинематически соединен с центральным отклоняющим блоком, при этом он с одной стороны в диаметральных точках соединен с двумя пружинами, вторые концы которых жестко закреплены на кузове, а с другой стороны с помощью двух гибких тросов, закрепленных диаметрально на центральном отклоняющем блоке и перекинутых через два боковых отклоняющих блока, соединен с соответствующими концами букс измерительной колесной пары, при этом верхний конец компенсирующего двуплечего рычага кинематически связан с регистрирующим блоком, новым является то, что регистрирующий блок представляет собой датчик углового (линейного) перемещения, выход которого через последовательно соединенные первый масштабный усилитель и первый преобразователь аналог-код подключен на первый входной порт микроконтроллера, на второй входной порт которого через последовательно соединенные второй масштабный усилитель и второй преобразователь аналог-код подключен измеритель пройденного пути.
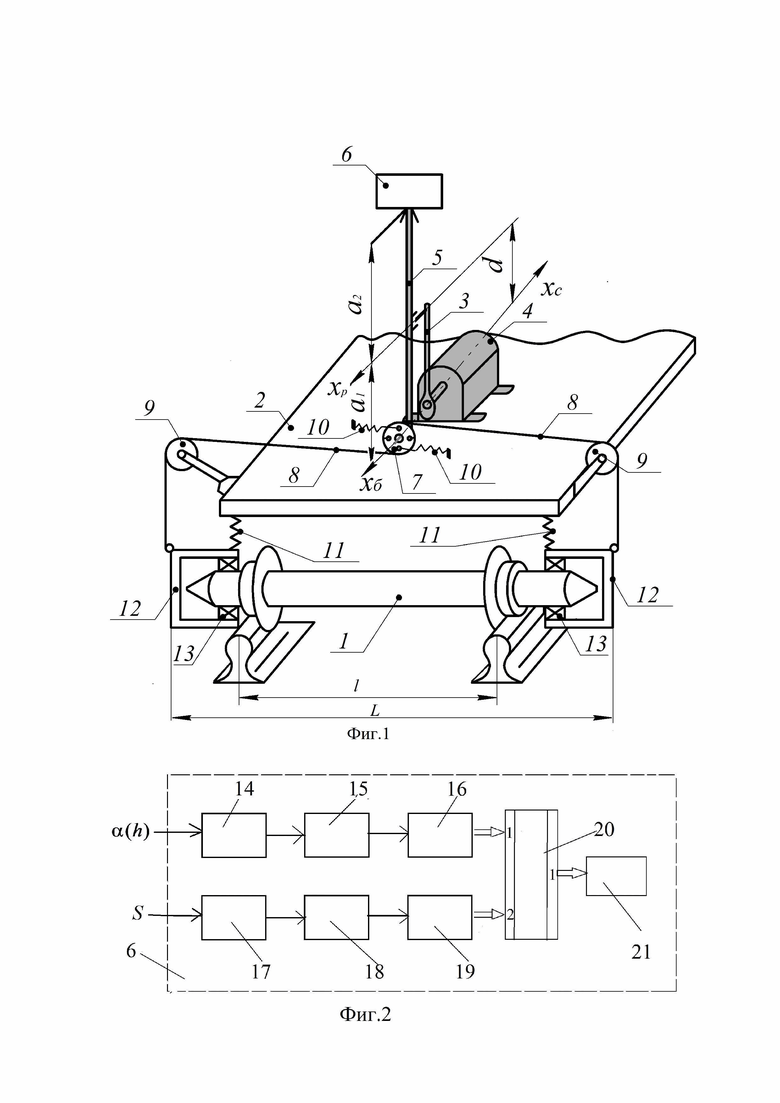
Существо изобретения поясняется чертежами, представленными на фиг.1 и фиг.2, где соответственно изображены кинематическая схема устройства и блок-схема устройства регистрации.
На фиг.1 и фиг.2 приняты следующие обозначения:
1 – измерительная колесная пара;
2 – подрессоренный кузов;
3 – рычаг, стабилизированный (в вертикальной плоскости);
4 – гироскопический стабилизатор;
5 – компенсирующий двуплечий рычаг;
6 – регистрирующий блок (устройство);
7 – центральный отклоняющий блок;
8 – гибкие тросы;
9 – боковые отклоняющие блоки;
10 – пружины ;
11 – рессоры;
12 – буксы;
13 – подшипники;
14 - датчик линейного перемещения или датчик углового перемещения (далее по тексту для краткости – датчик перемещения);
15 – первый масштабный усилитель;
16 – первый преобразователь аналог-код;
17 – измеритель пройденного пути;
18 – второй масштабный усилитель;
19 – второй преобразователь аналог-код;
20 - компьютер – микроконтроллер (далее по тексту микроконтроллер);
21 – накопитель;
 ось стабилизации гироскопического стабилизатора;
ось стабилизации гироскопического стабилизатора;
 ось вращения центрального отклоняющего блока;
ось вращения центрального отклоняющего блока;
 ось вращения двуплечего компенсирующего рычага;
ось вращения двуплечего компенсирующего рычага;
 расстояние между осью
расстояние между осью  и
и 
 расстояние между осью и верхним концом двуплечего компенсирующего рычага;
расстояние между осью и верхним концом двуплечего компенсирующего рычага;
 расстояние между осью
расстояние между осью  и ;
и ;
 пройденный путь путеизмерителем;
пройденный путь путеизмерителем;
 угловое превышение рельсовых нитей;
угловое превышение рельсовых нитей;
 линейное превышение рельсовых нитей.
линейное превышение рельсовых нитей.
В соответствии с фиг.1 кинематическая схема, являющаяся частью устройства, содержит измерительную колесную пару 1, которая при движении путеизмерителя вращается в подшипниках 13, размещенных в буксах 12, подрессоренный кузов 2, связанный с буксами с помощью пружин 11, стабилизированный в вертикальной плоскости рычаг 3, который жестко закреплен на оси стабилизации  гироскопического стабилизатора 4, компенсирующий двуплечий рычаг 5, регистрирующий блок 6, центральный отклоняющий блок 7, установленный кинематически на оси
гироскопического стабилизатора 4, компенсирующий двуплечий рычаг 5, регистрирующий блок 6, центральный отклоняющий блок 7, установленный кинематически на оси  компенсирующего двуплечего рычага 5, гибкие тросы 8, которые с одной стороны охватывают центральный отклоняющий блок 7 и жестко крепятся к нему в диаметрально противоположных точках, а с другой стороны охватывают боковые отклоняющие блоки 9, установленные на кузове, и жестко крепятся к буксам 12 измерительной колесной пары 1. Пружины 10 натяжения трособлочной системы закреплены жестко в диаметрально противоположных точках центрального отклоняющего блока 7 (перпендикулярно линии точек крепления гибких тросов 8). Компенсирующий двуплечий рычаг 5 своим верхним концом кинематически перемещает подвижную часть датчика перемещения 14, который является измерительным устройством регистрирующего блока 6.
компенсирующего двуплечего рычага 5, гибкие тросы 8, которые с одной стороны охватывают центральный отклоняющий блок 7 и жестко крепятся к нему в диаметрально противоположных точках, а с другой стороны охватывают боковые отклоняющие блоки 9, установленные на кузове, и жестко крепятся к буксам 12 измерительной колесной пары 1. Пружины 10 натяжения трособлочной системы закреплены жестко в диаметрально противоположных точках центрального отклоняющего блока 7 (перпендикулярно линии точек крепления гибких тросов 8). Компенсирующий двуплечий рычаг 5 своим верхним концом кинематически перемещает подвижную часть датчика перемещения 14, который является измерительным устройством регистрирующего блока 6.
Нам фиг.2 предлагаемого устройства приведена блок-схема регистрирующего блока 6, который содержит два канала измерения.
Первый канал предназначен для измерения превышения одного рельса над другим и состоит последовательно соединенных: датчика перемещения 14, первого масштабного усилителя 15 и первого преобразователь аналог-код 16, выход которого подключен на первый входной порт микроконтроллера 20.
Второй канал предназначен для измерения пройденного путеизмерителем пути и состоит последовательно соединенных: измерителя пройденного пути 17, второго масштабного усилителя 18 и второго преобразователь аналог-код 19, выход которого подключен на второй входной порт микроконтроллера 20.
К выходному порту микроконтроллера 20 подключен накопитель 21, например, в виде флешки.
Устройство работает следующим образом.
Работа кинематического канала измерения.
При изменении положения рельсовых нитей по высоте изменяется соответственно положение катящейся по ним измерительной колесной пары 1. При этом возможны следующие варианты расположения измерительной колесной пары и подрессоренного кузова.
1). Положение кузова 2 неизменно, а ось измерительной колесной пары 1 отклоняется.
При этом перемещение букс 12 измерительной колесной пары посредством гибких тросов 8 и компенсирующего рычага 5 передается в заданном масштабе на регистрирующий блок 6, а именно на датчик перемещения 14.
2). Кузов 2 и измерительная колесная пара 1премещаются вместе и синхронно на один и тот же угол.
В этом случае положение блока 7, установленного на нижнем конце компенсирующего рычага 5, относительно кузова не меняется и рычаг 3, стабилизированный в вертикальной плоскости, заставляет повернуться компенсирующий рычаг 5 вокруг оси блока 7, передавая таким образом, на датчик положения 14 регистрирующего блока 6 отклонение рельс по высоте.
3). Положение измерительной колесной пары не меняется, а происходят лишь колебания кузова.
В этом варианте компенсирующий рычаг 5 поворачивается одновременно трособлочной системой, связывающей его с буксами, и рычагом 3, стабилизированным в вертикальной плоскости. При этом верхний конец компенсирующего рычага 5, связанный с датчиком положения 14 регистрирующего блока 6, остается неподвижным относительно кузова. Сигнал с датчика положения будет отсутствовать.
4). Колебание кузова вверх-вниз.
В этом варианте, когда нет наклона, происходит лишь ослабление и натяжение пружин 10, не вызывая углового перемещения компенсирующего рычаг 5.
Таким образом, при любых колебаниях кузова регистрирующее устройство фиксирует лишь отклонение взаимного положения рельсовых нитей по высоте.
Работа электронного канала измерения.
В соответствии с фиг.2 одновременно и в реальном масштабе времени по запросу микроконтроллера 20 происходит опрос первого 16 и второго 19 преобразователей аналог-код, на входы которых соответственно подключены первый 15 и второй 18 масштабные усилители, соединенные своими входами соответственно с выходами датчика перемещения 14 и измерителя пройденного пути 17. Задача микроконтроллера состоит в формировании двух файлов, в которые в функции времени записаны показания датчика перемещения 14 и измерителя пройденного пути 17

где  дискретное время, а угловые
дискретное время, а угловые  и линейные перемещения
и линейные перемещения  связаны соотношением
связаны соотношением 
Указанные файлы записывают в накопитель и в дальнейшем с помощью программы, например, Excel строят графики
которые используют для анализа качества железнодорожного полотна.
В качестве датчика перемещения 14 можно применить датчик линейного перемещения, например, в виде оптической линейки или датчик углового перемещения, например, в виде кругового потенциометра или индуктивного датчика угла.
В качестве измерителя пройденного пути 17 можно применить тахогенератор, который с помощью гибкого троса кинематически связан с измерительной колесной парой 1 или приемное устройство спутниковой навигационной системы.
В дополнение положительных качеств прототипа, которые состоят в более простой кинематической схеме, позволяющей построить измерительное устройство с меньшим количеством деталей, что уменьшает инерционность механической системы измерения, предлагаемое устройство заменяет механический регистрирующий блок электронным, который формирует более точно и надежно графики, характеризующие взаимное расположение рельсовых нитей в вертикальной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости | 1982 |
|
SU1120166A1 |
| Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости | 2017 |
|
RU2676951C1 |
| Устройство для определения и регистрации взаимного положения рельсовых путей в вертикальной плоскости | 1978 |
|
SU960531A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| Устройство для контроля состояния рельсового пути и для определения его пространственных координат | 2022 |
|
RU2793310C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОСАДКИ РЕЛЬСОВЫХ НИТЕЙ | 2003 |
|
RU2242554C2 |
| Устройство для измерения ширины колеи железнодорожного пути | 1980 |
|
SU966131A1 |
| СПОСОБ ИНЕРЦИАЛЬНЫХ ИЗМЕРЕНИЙ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2242391C2 |
| Путеизмерительный вагон | 1947 |
|
SU89536A1 |
Изобретение относится к измерительной технике. Предлагаемое устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости содержит измерительную колесную пару, подрессоренный кузов, трособлочную систему, регистрирующий блок и гироскопический стабилизатор, с выходной осью которого жестко связан вертикальный рычаг, верхний конец которого шарнирно соединен с компенсирующим двуплечим рычагом, нижний конец которого кинематически соединен с центральным отклоняющим блоком, при этом он с одной стороны в диаметральных точках соединен с двумя пружинами, вторые концы которых жестко закреплены на кузове, а с другой стороны с помощью двух гибких тросов соединен с соответствующими концами букс измерительной колесной пары, при этом верхний конец компенсирующего двуплечего рычага кинематически связан с регистрирующим блоком, состоящиим из датчика углового перемещения, выход которого через последовательно соединенные первый масштабный усилитель и первый преобразователь аналог-код подключен на первый входной порт микроконтроллера. Техническим результатом является упрощение конструкции регистрирующего блока. 2 ил.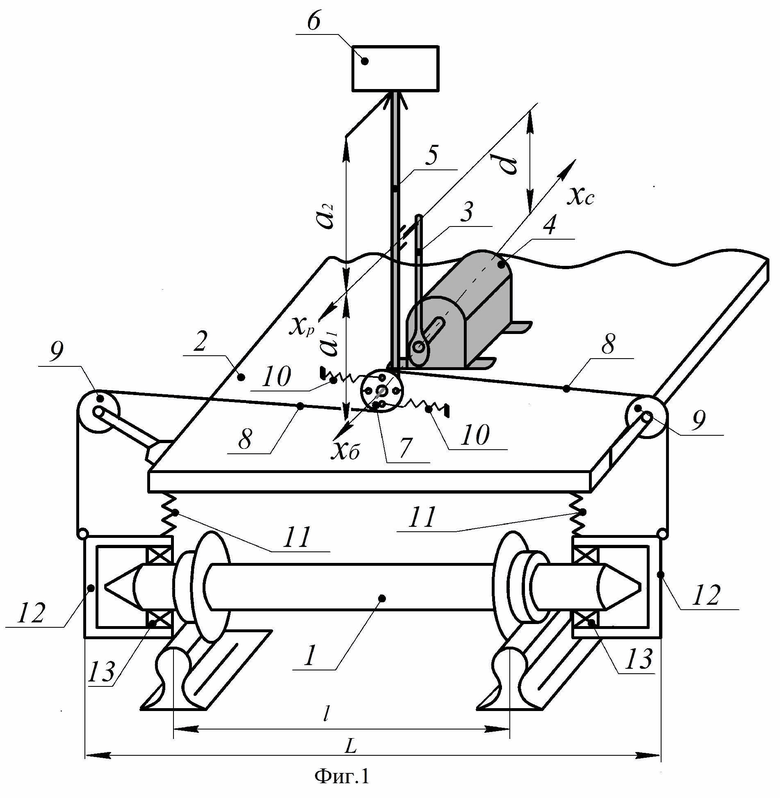
Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости, содержащее измерительную колесную пару, подрессоренный кузов, трособлочную систему, регистрирующий блок и установленный на корпусе кузова гироскопический стабилизатор, с выходной осью которого жестко связан вертикальный рычаг, верхний конец которого шарнирно соединен с компенсирующим двуплечим рычагом, нижний конец которого кинематически соединен с центральным отклоняющим блоком, при этом центральный отклоняющий блок с одной стороны в диаметральных точках соединен с двумя пружинами, вторые концы которых жестко закреплены на кузове, а с другой стороны с помощью двух гибких тросов, закрепленных диаметрально на центральном отклоняющем блоке и перекинутых через два боковых отклоняющих блока, соединен с соответствующими концами букс измерительной колесной пары, при этом верхний конец компенсирующего двуплечего рычага кинематически связан с регистрирующим блоком, отличающееся тем, что регистрирующий блок представляет собой датчик линейного перемещения или датчик углового перемещения, выход которого через последовательно соединенные первый масштабный усилитель и первый преобразователь аналог-код подключен на первый входной порт компьютера-микроконтроллера, на второй входной порт которого через последовательно соединенные второй масштабный усилитель и второй преобразователь аналог-код подключен измеритель пройденного пути.
| Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости | 1982 |
|
SU1120166A1 |
| Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости | 2017 |
|
RU2676951C1 |
| Способ определения параметров геометрии рельсовой колеи и система для его осуществления | 2018 |
|
RU2686341C1 |
| Способ получения хлорангидридов перфторалкилфосфиновых кислот | 1973 |
|
SU461628A1 |

