Область техники
Изобретение относится к устройству и способу для управления началом работы по меньшей мере одного инструмента в машине для обработки рыбы, в которой инструмент и рыба перемещаются друг относительно друга по заданному пути транспортировки, причем положение рыбы относительно инструмента определяется с помощью направляющего элемента, внедряющегося внутрь рыбы, а инструмент после выравнивания рыбы в результате внедрения этого направляющего элемента начинает воздействие на рыбу или врезание в нее.
Уровень техники
При обработке или подготовке рыбы часто, в особенности когда рыба еще не выпотрошена, т.е. ее брюшная полость не очищена, требуется выравнивать ее в области брюшной полости, чтобы вскрыть ее прорезным ножом и затем удалить внутренности с помощью всасывающего устройства и/или произвести очистку брюшной полости с помощью скребков, щеток и т.п. В известном способе обработки, описанном, например, в DE 19829376 А1, рыба, лежащая на спинке, транспортируется в призмах цепного транспортера, однако известны также машины, в которых рыба подводится снаружи и перемещается транспортерными лентами. Чтобы выравнивать рыбу относительно ее средней оси, в брюшную полость или в пищеварительный тракт рыбы вводят направляющий элемент, представляющий собой в указанной публикации штихель, внедряемый в область ануса.
В известных способах из-за того, что рыба в приемных призмах цепного транспортера или между транспортерными лентами направляется относительно свободно и, например, деформации рыбы не могут быть скомпенсированы, возникают трудности, если штихель не попадает в анус или другое место внедрения. В этом случае штихель отжимает рыбу в сторону и его острие повреждает чешую рыбы с боковой стороны. В особенности рыба повреждается в нежелательных местах последующими инструментами, такими как, например, описанные в DE 19829376 А1 всасывающее устройство, скребок и, прежде всего, прорезной нож, работающий в одном функциональном узле со штихелем, но приводимый в действие отдельно. В особенности рыба повреждается сверху, так что конечный продукт уже не удовлетворяет требованиям высшего качества. Этот недостаток является особенно серьезным, если, как сказано в названной публикации, ставится цель выполнять на машине так называемый "княжеский разрез", который до сих пор делали только вручную (так называется способ потрошения, удовлетворяющий наивысшим требованиям качества, при котором остаются неразрезанными последние 2-3 см брюшной стенки в области жабр), и если хотят сделать возможной машинную обработку также и для ценных видов рыбы.
Постановка задачи
Целью изобретения является устранить указанные трудности и недостатки и, прежде всего, избежать упомянутых повреждений рыбы.
В частности, задача изобретения состоит в том, чтобы обеспечить приведение в действие последующих инструментов машины только в случае, если штихель внедрен правильно с точки зрения его функции и, тем самым, если рыба позиционирована правильно.
Решение задачи
Поставленная задача решается тем, что в устройстве для управления началом работы по меньшей мере одного инструмента в машине для обработки рыбы, в которой инструмент и рыбу перемещают друг относительно друга по заданному пути транспортировки, содержащем направляющий элемент для определения положения рыбы относительно инструмента, установленный с возможностью внедрения внутрь рыбы, согласно изобретению направляющий элемент снабжен датчиком для определения положения рыбы относительно направляющего элемента, соединенным с вычислительным блоком, служащим для сравнения заданного положения рыбы и ее фактического положения, выход которого связан с исполнительным механизмом для приведения инструмента в действие только в том случае, когда фактическое положение рыбы совпадает с ее заданным положением при правильно внедренном в нее направляющем элементе.
Таким образом, прорезной нож и другие последующие инструменты, перемещаемые относительно рыбы, приводятся в действие только тогда, когда фактическое положение рыбы, определяемое датчиком, совпадает с заданным значением при правильно внедренном штихеле.
Согласно одному варианту осуществления изобретения датчик положения рыбы относительно направляющего элемента содержит световод, конец которого расположен в направляющем устройство и который соединен с вычислительным блоком, выполненным в виде блока обработки, а источник света установлен таким образом, что свет, направленный на конец световода, не достигает его при правильно внедренном направляющем элементе внутрь рыбы.
При этом предпочтительно использовать модулированный свет, чтобы в максимальной степени уменьшить помехи от постороннего света (дневной свет, лампы и т.д.). В этом варианте осуществления находящийся в направляющем элементе конец световода принимает модулированный свет, исходящий от источника света, расположенного вне рыбы и предпочтительно выше нее. Если острие направляющего элемента находится в рыбе, то световой сигнал в световоде отсутствует и вычислительный блок фиксирует совпадение фактического положения рыбы с ее заданным положением, чтобы инициировать сигнал приведения в действие, после чего последующие инструменты внедряются в брюшную полость и могут работать внутри рыбы. Если же острие направляющего элемента не попадает в место внедрения, т.е. в анус, и движется вне брюшной полости, то на конец световода попадает свет, посылаемый источником света. При этом в вычислительном блоке вырабатывается сигнал несовпадения и производится остановка последующих инструментов с приведением их в положение покоя. Рыбу, боковая сторона которой остается неповрежденной, можно снять на конце конвейерной линии транспортирующего устройства и снова поместить в установку.
Согласно другому варианту осуществления изобретения датчик положения рыбы относительно направляющего элемента выполнен в виде механического щупа. Положение щупа при ощупывании рыбы контролируется предпочтительно с помощью концевого выключателя.
Механический щуп может быть выполнен в виде двойного рычага, имеющего по одному рычажному элементу, установленному с каждой стороны направляющего элемента с возможностью движения независимо друг от друга.
Рычажные элементы могут быть установлены на общей оси поворота, а их положение можно контролировать при помощью концевого выключателя. Если расположенный между ощупывающими рычажными элементами направляющий элемент находится вне рыбы, то оба рычажных элемента находятся в исходном положении и концевой выключатель нажат. Если направляющий элемент внедрен в рыбу, то оба ощупывающих рычага поворачиваются. Регистрируется совпадение фактического положения рыбы относительно направляющего элемента с заданным положением. Результат будет таким же, как в варианте со световодом, описанном выше. Если же направляющий элемент соскальзывает на одну сторону рыбы, то поворачивается только один ощупывающий рычаг, расположенный между рыбой и направляющим элементом, а другой ощупывающий рычаг, находящийся со стороны направляющего элемента, обращенной от рыбы, остается в исходном положении. В результате регистрируется отклонение фактического положения рыбы от заданного с описанными выше последствиями для инструментов, которые в действие не приводятся.
Направляющий элемент предпочтительно представляет собой штихель.
Поставленная задача решается также тем, что в способе управления началом работы по меньшей мере одного инструмента в машине для обработки рыбы, в которой инструмент и рыбу перемещают друг относительно друга по заданному пути транспортировки, предусматривающем определение положения рыбы относительно инструмента с помощью направляющего элемента, внедряемого внутрь рыбы, причем начало воздействия инструмента на рыбу или врезания в нее осуществляют после выравнивания рыбы в результате внедрения этого направляющего элемента, согласно изобретению контролируют положение рыбы относительно направляющего элемента, сравнивая фактическое положение рыбы относительно направляющего элемента с ее заданным положением, а начало воздействия инструмента осуществляют только в случае совпадения фактического положения рыбы с ее заданным положением при правильно внедренном направляющем элементе.
Согласно одному варианту осуществления способа определение положения рыбы относительно направляющего элемента осуществляют путем направления света от источника света на конец световода, расположенный в направляющем элементе, так что свет от источника света не достигает указанного конца световода, если направляющий элемент внедрен в рыбу правильно, и путем регистрации светового сигнала или его отсутствия в световоде при внедрении направляющего элемента в рыбу.
Согласно другому варианту осуществления способа, определение положения рыбы относительно направляющего элемента осуществляют путем ощупывания тела рыбы механическим щупом.
При этом ощупывание можно осуществлять в двух точках, а определение совпадения фактического положения рыбы с заданным осуществлять по точкам ощупывания.
Краткое описание чертежей
Дальнейшие преимущества и варианты выполнения или возможности изобретения вытекают из последующего описания примеров со ссылками на чертежи, на которых
фиг.1А схематично изображает один вариант осуществления устройства согласно изобретению в продольном разрезе;
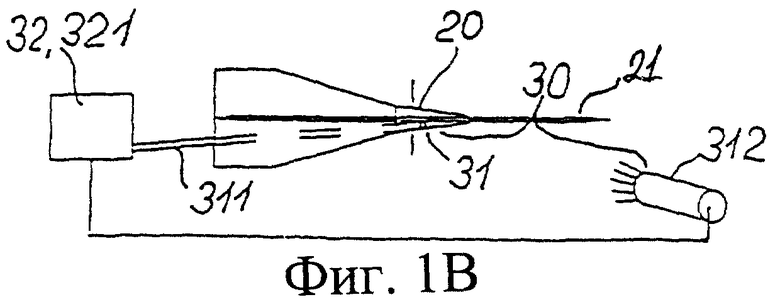
фиг.1В - вид сверху на фиг.1А;
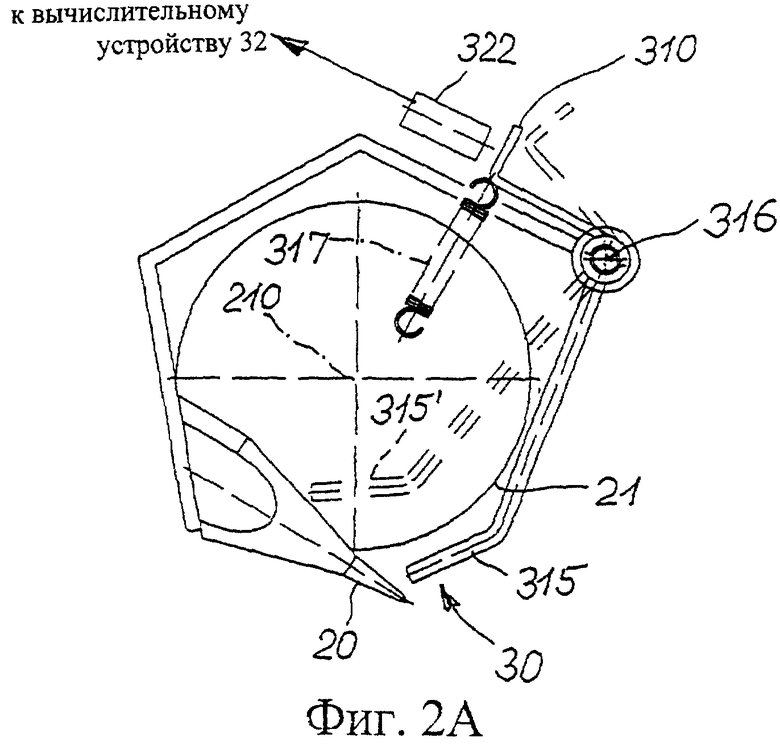
фиг.2А - другой вариант осуществления устройства согласно изобретению в продольном разрезе; и
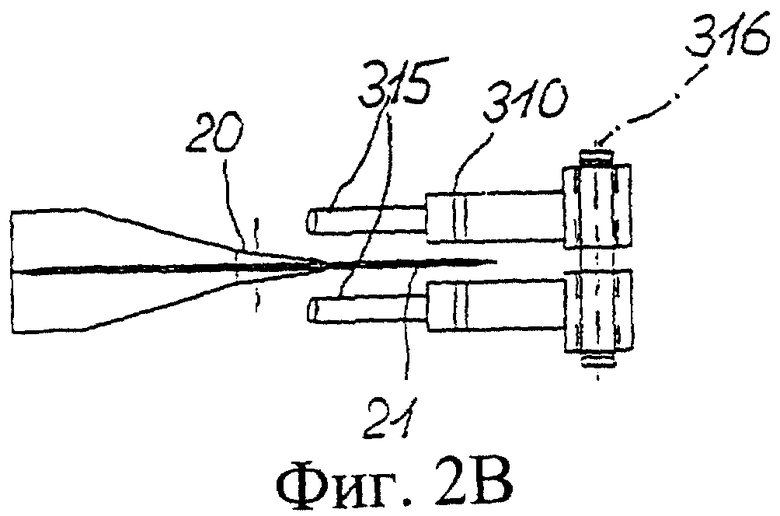
фиг.2В - вид сверху на фиг.2А.
Примеры выполнения изобретения
На фиг.1А и 1В представлен первый вариант выполнения конструкции штихеля, которая применяется, например, в машине для потрошения рыбы типа описанной в DE 19829376 A1. Рыба 10, размещаемая в транспортере (не показан) брюшком вверх, транспортируется в направлении стрелки А хвостом вперед. Брюшная полость 11 и брюшная стенка 12 рыбы показаны чисто схематично. С целью выравнивания рыбы 10 установлен выполненный в виде штихеля 20 направляющий элемент для внедрения в брюшную полость через анальное отверстие (не показано). Штихель 20 имеет в своей расширенной части выемку, в которую входит прорезной нож 21 для вскрытия брюшной полости. Этот прорезной нож 21 при подаче в направлении стрелки А разрезает рыбу, которая удерживается в выровненном положении штихелем 20, по брюшной стенке 12 вдоль брюшного шва, благодаря чему могут быть приводиться в действие расположенные далее по ходу процесса инструменты для удаления внутренностей и очистки брюшной полости.
В штихеле проходит световод 311, один конец которого подключен к вычислительному устройству 32 или блоку 321 обработки, а другой конец находится на верхней стороне штихеля и оканчивается вровень с ним. Этот конец образует датчик 31, второй функциональный элемент которого расположен напротив, снаружи от рыбы и ножа, и представляет собой источник 312 света, направленный на этот конец световода. Свет или другие оптические сигналы от источника света не достигают конца световода 311, если штихель 20, как показано на чертеже, внедрен в брюшную полость правильно и, благодаря его положению перед прорезным ножом 21, находится в области еще неразрезанной брюшной стенки 12. Если же штихель 20 не введен в анус правильно и находится снаружи рыбы на ее наружной поверхности, то в световод 311, соединенный с вычислительным устройством 32, попадает свет. В этом случае вычислительное устройство 32 или блок 321 обработки регистрирует передаваемые по световоду 311 световые сигналы. Вычислительное устройство служит для того, чтобы преобразовывать эти принятые световые сигналы в управляющие значения, с помощью которых можно воздействовать на шаговые двигатели (не показаны), известные, например, из DE 19829376 А1, как на исполнительные элементы для инструментов. Если, как в первом рассмотренной случае, брюшная стенка расположена правильно между источником 312 света и датчиком 31, то управляющий сигнал не вырабатывается и машина выполняет нормальную последовательность операций. Однако если на датчик 31 попадает свет и в блоке 321 обработки вырабатывается управляющий сигнал или последовательность сигналов, то он или они передаются далее на инструменты или их исполнительные элементы/шаговые двигатели и инструменты остаются в своих исходных положениях. В особенности это касается прорезного ножа 21, который в этом случае остается в своем положении покоя в выемке штихеля 20, не врезаясь в рыбу. Если, как в известном устройстве, штихель и прорезной нож выполнены как единый структурный элемент устройства, образующий подвижный узел, то оба они возвращаются по стрелке В назад в их общее положение покоя, если штихель не вошел правильно, с точки зрения его функции, в анус. Этот совместный поворот осуществляется вокруг оси, расположенной вне чертежа, при этом штихель 20 может еще самостоятельно поворачиваться вокруг оси 210 ножа 21, чтобы его можно было вывести из рыбы в конце процесса разрезания. Движение по стрелке В осуществляется один раз для каждой перемещаемой рыбы.
На фиг.2А и 2В показан другой, механический вариант выполнения устройства, который тоже может быть использован в машине согласно DE 19829276 A1. Штихель 20, выполненный с возможностью внедрения в рыбу путем поворота вокруг оси 210 вращения прорезного ножа 21, взаимодействует с датчиком в виде ощупывающей пары 315, установленной с возможностью поворота на оси 316. На каждом ощупывающем рычаге находится механический переключающий элемент 310, взаимодействующий с концевым выключателем 322, который, в свою очередь, соединен с вычислительным устройством 32 (не показано).
В положении, показанном сплошными линиями, штихель 20, расположенный посередине между ощупывающими рычагами 315, находится вне рыбы, и оба ощупывающих рычага находятся в исходном положении, так что переключающий элемент 310 держит концевой выключатель в нажатом положении. Если штихель 20 внедряется правильно, с точки зрения его функции, в анус рыбы, то оба ощупывающих рычага отклоняются в положение, обозначенное 315'. Концевой выключатель создает при помощи вычислительного устройства сигнал, который может управлять расположенными далее по ходу процесса инструментами, так что они могут очищать брюшную полость после разреза брюшной стенки прорезным ножом 21.
Если же штихель 20 соскальзывает на одну сторону рыбы, то поворачивается только один из двух ощупывающих рычагов, а именно тот, который находится со стороны штихеля, обращенной к рыбе, т.е. находится между рыбой и штихелем. Другой ощупывающий рычаг 315, который находится со стороны штихеля, обращенной от рыбы, остается под действием возвратной пружины 317 в исходном положении. В результате концевой выключатель 322 остается в нажатом положении и сигнал не вырабатывается.
Таким образом, с помощью сигналов, вырабатываемых в концевом выключателе 322 в соответствии с положением ощупывающих рычагов 315, соединенных с механическими переключающими элементами 310, можно управлять последующими инструментами так, что они вводятся в брюшную полость только тогда, когда штихель 20 правильно внедрен в рыбу и прорезной нож 21 вскрывает брюшную стенку.
Таким образом, с помощью изобретения при машинной обработке рыбы, в том числе рыбы ценных видов, можно гарантировать получение продукта, удовлетворяющего действующим на сегодняшний день чрезвычайно высоким требованиям качества.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МЕХАНИЗИРОВАННОГО УДАЛЕНИЯ МЕЖМЫШЕЧНЫХ КОСТЕЙ ИЗ ФИЛЕЙНЫХ ЧАСТЕЙ ТРАНСПОРТИРУЕМЫХ РЫБ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2012 |
|
RU2576068C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ ГОРИЗОНТА РЕЗАНИЯ ДОБЫЧНОЙ ГОРНОЙ УСТАНОВКИ | 1995 |
|
RU2107162C1 |
| Устройство для ориентированной подачи рыбы к режущим инструментам | 1990 |
|
SU1750581A1 |
| ИНСТРУМЕНТ, УСТРОЙСТВО И СПОСОБ ДЛЯ ПОТРОШЕНИЯ РЫБ, ВСКРЫТЫХ В БРЮШНОЙ ПОЛОСТИ | 2007 |
|
RU2396753C2 |
| МАШИНА ДЛЯ РАЗДЕЛКИ РЫ^Ы | 1967 |
|
SU204518A1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗГЛАВЛИВАНИЯ РЫБЫ | 2014 |
|
RU2573362C1 |
| Устройство для филетирования рыбы | 1974 |
|
SU847896A3 |
| Машина для филетирования рыбы | 1976 |
|
SU917680A3 |
| Устройство для выправки подаваемой головой вперед рыбы относительно положения ее плоскости симметрии | 1982 |
|
SU1184429A3 |
| СПОСОБ ОЦЕНКИ ШЕРОХОВАТОСТИ ПОВЕРХНОСТИ ДЕТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2541730C2 |
Изобретение относится к устройству для управления началом работы по меньшей мере одного инструмента в машине для обработки рыбы, в которой инструмент и рыбу перемещают друг относительно друга по заданному пути транспортировки, содержащему направляющий элемент для определения положения рыбы относительно инструмента, установленный с возможностью внедрения внутрь рыбы. При этом направляющий элемент снабжен датчиком для определения положения рыбы относительно направляющего элемента, соединенным с вычислительным блоком, служащим для сравнения заданного положения рыбы и ее фактического положения, выход которого связан с исполнительным механизмом для приведения инструмента в действие только в том случае, когда фактическое положение рыбы совпадает с ее заданным положением при правильно внедренном в нее направляющем элементе. Данное изобретение обеспечивает правильное положение рыбы относительно направляющего элемента, а также позволяет избежать повреждение рыбы из-за неправильного ее положения относительно направляющего элемента. 2 н. и 7 з.п.ф-лы, 4 ил.
| DE 19829376 A1, 18.02.1999 | |||
| US 5026318 A, 25.06.1991 | |||
| Способ и устройство для разделки рыбы | 1959 |
|
SU125656A1 |
| УСТРОЙСТВО для ОБЕЗГЛАВЛИВАНИЯ РЫБЫ | 0 |
|
SU381193A1 |
| Устройство для управления инструментами рыборазделочной машины | 1976 |
|
SU586822A3 |

