ОБЛАСТЬ ТЕХНИКИ
[0001] Изобретение относится к области гидроакустики, в частности, к гидроакустической системе для обнаружения подводных объектов и к способу обнаружения подводных объектов с использованием такой системы.
УРОВЕНЬ ТЕХНИКИ
[0002] Контроль акваторий осуществляется в самых разных целях: от решения исследовательских задач до обеспечения безопасности прилегающих территорий и самих акваторий. Наблюдение может проводиться как в надводной части акватории, так и под водой. В зависимости от задач, на решение которых направлен контроль акваторий, различаются способы и инструменты для их реализации.
[0003] Особый интерес представляет контроль объектов, входящих в подводную часть акватории и перемещающихся в ней. Для реализации этого разработаны способы, использующие облучение подводного пространства, подлежащего контролю, гидроакустическим сигналом. Распространение такого сигнала под водой происходит на значительные расстояния, что позволяет использовать системы и способы, основанные на излучении и приеме таких сигналов, в качестве эффективного средства контроля акватории. Тем не менее, способность гидроакустических сигналов распространяться на значительные расстояния также порождает и ряд проблем, связанных в первую очередь с появлением поверхностной и донной реверберации, снижающей точность и значительно усложняющей контроль акватории. Для работы в условиях реверберационных помех ограничивают объем облучаемого пространства, например, за счет использования направленного облучения или ограничения длительности импульсов. В результате такого ограничения контролируемого пространства возникают зоны неуверенного приема или неохваченные зоны, обнаружение объекта в которых затруднено.
[0004] Известен способ обнаружения подводных объектов на морском рубеже и в мелком море (патент РФ 2161319, дата публикации 27.12.2000, класс МПК G01S 15/00), согласно которому во избежание образования зон неуверенного приема используется облучение подводного пространства гидроакустическими сигналами разных частот в верхней полусфере из ряда точек с известными координатами. После этого в течение ограниченного периода времени производится прием сигнала в указанных точках, причем в каждой точке прием осуществляется одновременно как минимум на трех частотах, и вывод об обнаружении объекта делается на основании анализа обработанных сигналов. Для реализации этого способа предложена барьерная система, содержащая множество приемно-излучающих гидроакустических модулей, располагаемых на дне и объединенных кабельной линией связи с аппаратурой берегового поста. Недостатками известных способа и системы являются сравнительно невысокая точность определения наличия в акватории подводных объектов, а также необходимость излучения импульсов из множества точек.
[0005] Таким образом, существует потребность в разработке решений, позволяющих повысить надежность обнаружения в акватории подводных объектов, таких как, например, водолазы или беспилотные подводные аппараты. Также существует потребность в обеспечении надежного обнаружения подводных объектов в условиях наличия посторонних предметов на дне акватории и при отражении зондирующего импульса от волн.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0006] Указанная задача решена предложенной гидроакустической системой для обнаружения подводных объектов, содержащей гидроакустическое устройство и программно-аппаратный комплекс. Гидроакустическое устройство содержит водонепроницаемый корпус, одну излучающую и по меньшей мере три приемные антенны, расположенные на корпусе, и источник электропитания, расположенный внутри корпуса или отдельно вне его. Антенны гидроакустического устройства выполнены с возможностью излучения и приема гидроакустических сигналов в верхней полусфере и указанная одна излучающая антенна состоит из по меньшей мере девяти излучающих элементов, а каждая из указанных по меньшей мере трех приемных антенн состоит из по меньшей мере двенадцати элементов. Источник электропитания выполнен с возможностью подачи электропитания на указанные одну излучающую и по меньшей мере три приемные антенны. Программно-аппаратный комплекс гидроакустической системы содержит вычислительный блок и соединен с гидроакустическим устройством с возможностью управления работой антенн посредством управляющих сигналов и с возможностью получения сигналов от каждой из указанных по меньшей мере трех приемных антенн и обработки этих сигналов с получением результирующего сигнала. При этом программно-аппаратный комплекс гидроакустической системы выполнен с возможностью формирования секторных диаграмм направленности для каждого излучающего элемента указанной одной излучающей антенны и формирования секторных диаграмм направленности для каждого приемного элемента каждой из по меньшей мере трех приемных антенн, причем сектора выбираются таким образом, чтобы обеспечивать охват верхней полусферы, а диаграмма направленности соответствующего излучающего или приемного элемента в каждом секторе оптимизирована преобразованием Дольфа-Чебышева. Кроме того, программно-аппаратный комплекс гидроакустической системы выполнен с возможностью получения данных о подводной среде и ограничения времени приема отраженного гидроакустического сигнала в каждом секторе на основании этих данных, а также с возможностью определения порогового значения сигнала для каждого сектора посредством облучения подводной среды излучением гидроакустической системы. При этом обработка сигналов программно-аппаратным комплексом включает для каждой из по меньшей мере трех приемных антенн суммирование сигналов, принятых разными элементами каждой приемной антенны в одном секторе, для получения результирующего значения сигнала для этого сектора. Программно-аппаратный комплекс также выполнен с возможностью выдачи сообщения об обнаружении подводного объекта на основании сравнения результирующего значения сигнала для каждого сектора с заданным программно-аппаратному комплексу пороговым значением сигнала, соответствующим указанному сектору, при превышении указанного порогового значения результирующим значением сигнала в этом секторе для по меньшей мере одной из указанных по меньшей мере трех приемных антенн. Технический результат, обеспечиваемый системой, заключается в повышении точности и надежности обнаружения подводных объектов за счет уменьшения влияния поверхностной и донной реверберации, а также исключения влияния на прием гидроакустического сигнала посторонних объектов, расположенных в пределах контролируемой акватории, и повышения качества анализируемых данных за счет получения сигнала множеством элементов.
[0007] Согласно одному из частных вариантов реализации системы, излучающие и приемные элементы в соответствующих излучающей и приемных антеннах расположены на расстоянии, меньшем длины волны гидроакустического сигнала.
[0008] Согласно другому частному варианту реализации системы, программно-аппаратный комплекс выполнен с возможностью выбора секторов и формирования в них диаграмм направленности для элементов антенн так, чтобы обеспечить перекрытие диаграмм направленности. В частности, предпочтительно обеспечивать перекрытие диаграмм направленности по уровню главного лепестка 0,7. В результате точность и надежность обнаружения подводных объектов дополнительно повышаются за счет перекрестного обнаружения объектов.
[0009] Согласно еще одному варианту реализации системы, программно-аппаратный комплекс выполнен с возможностью хранения и выдачи данных о подводной среде, что обеспечивает упрощение и ускорение работы системы в одних и тех же условиях. В другом варианте реализации системы, программно-аппаратный комплекс выполнен с возможностью определения данных о подводной среде путем излучения гидроакустического сигнала излучающими элементами излучающей антенны, приема отраженного гидроакустического сигнала приемными элементами приемных антенн без ограничения времени приема и обработки полученных данных программно-аппаратным комплексом. Это обеспечивает точность и надежность работы системы в изменяющихся условиях.
[0010] Согласно одному из частных вариантов реализации системы, гидроакустическое устройство и программно-аппаратный комплекс, могут быть соединены друг с другом посредством комбинированного кабеля.
[0011] Согласно еще одному варианту реализации системы, в программно-аппаратном комплексе предусмотрен интерфейс ввода-вывода данных, выполненный с возможностью выдачи сообщения об обнаружении подводного объекта, которое может представлять одно или более из следующего: звуковой сигнал, текстовое сообщение, в графическое сообщение на дисплее интерфейса ввода-вывода данных.
[0012] Согласно еще одному варианту реализации системы, программно-аппаратный комплекс выполнен с возможностью, при обнаружении по меньшей мере в одном секторе подводного объекта, устанавливать неподвижность обнаруженного объекта, направление движения или скорость движения обнаруженного объекта.
[0013] Согласно еще одному варианту реализации системы, программно-аппаратный комплекс выполнен с возможностью, при обнаружении по меньшей мере в одном секторе подводного объекта, определения координат обнаруженного объекта на основании сравнения временных задержек сигнала, принятого приемными элементами разных приемных антенн гидроакустического устройства.
[0014] Также, указанная задача решена предлагаемым способом обнаружения подводных объектов, реализуемым с использованием вышеупомянутой гидроакустической системы. Согласно способу, измеряют шум подводной среды посредством облучения подводной среды излучением гидроакустического устройства, определяют на основе измеренного шума подводной среды пороговое значение для обнаружения подводных объектов для каждого сектора и вводят определенные таким образом пороговые значения для каждого сектора в программно-аппаратный комплекс. Затем, с использованием гидроакустического устройства излучают гидроакустический сигнал излучающими элементами одной излучающей антенны и принимают отраженный гидроакустический сигнал приемными элементами каждой из по меньшей мере трех приемных антенн. Далее, принятый сигнал передают от гидроакустического устройства в программно-аппаратный комплекс, где обрабатывают указанный принятый сигнал с получением результирующих значений сигнала для каждого сектора, после чего производят сравнение результирующих значений сигнала для каждого сектора с соответствующим этому сектору пороговым значением и выдают сообщение об обнаружении в секторе подводного объекта при превышении порогового значения по меньшей мере одним из указанных результирующих значений. Отличительная особенность способа заключается в том, что перед измерением шума подводной среды формируют секторные диаграммы направленности для каждого излучающего элемента указанной излучающей антенны и секторные диаграммы направленности для каждого приемного элемента каждой из по меньшей мере трех приемных антенн, причем сектора выбираются таким образом, чтобы обеспечивать охват верхней полусферы, а диаграмму направленности соответствующего излучающего или приемного элемента в каждом секторе оптимизируют преобразованием Дольфа-Чебышева, а также в том, что получают данные о подводной среде и ограничивают на основании этих данных время приема сигнала в каждом секторе Кроме того, способ отличается тем, что при определении пороговых значений сигнала для каждого сектора излучают гидроакустический сигнал излучающими элементами излучающей антенны, принимают отраженный гидроакустический сигнал приемными элементами всех из по меньшей мере трех приемных антенн, после чего вычислительный блок программно-аппаратного комплекса рассчитывает пороговые значения сигнала для каждого сектора. Также способ отличается тем, что на этапе обработки отраженного гидроакустического сигнала для каждой из по меньшей мере трех приемных антенн производят суммирование сигналов, принятых разными приемными элементами этой антенны в одних и тех же секторах, после чего для каждого сектора получают результирующее значение сигнала для каждой приемной антенны. Предложенный способ обеспечивает надежное обнаружение подводных объектов за счет усиления принятого от объекта сигнала, а также за счет уменьшения влияния поверхностной и донной реверберации.
[0015] Согласно одному из вариантов реализации, на этапе формирования программно-аппаратным комплексом секторных диаграмм направленности для каждого излучающего элемента излучающей антенны и секторных диаграмм направленности для каждого приемного элемента каждой из по меньшей мере трех приемных антенн сектора выбирают таким образом, чтобы обеспечить перекрытие в них диаграмм направленности. Предпочтительно перекрытие диаграмм направленности по уровню главного лепестка 0,7. При такой реализации способа дополнительно повышаются точность и надежность обнаружения подводных объектов за счет перекрестного обнаружения объектов.
[0016] Согласно еще одному варианту реализации, на этапе получения данных о подводной среде данные извлекают из сохраненных в программно-аппаратном комплексе данных о подводной среде. В другом варианте реализации на этапе получения данных о подводной среде данные получают путем излучения гидроакустического сигнала излучающими элементами излучающей антенны, приема отраженного гидроакустического сигнала приемными элементами приемных антенн без ограничения времени приема и обработки полученных данных программно-аппаратным комплексом для получения данных о подводной среде.
[0017] Согласно одному из вариантов реализации, выдача сообщения об обнаружении подводного объекта производится в виде одного или более из следующего: звуковой сигнал, текстовое сообщение, графическое уведомление на дисплее интерфейса ввода-вывода данных.
[0018] Согласно одному из вариантов реализации, дополнительно может производиться установление неподвижности обнаруженного объекта, направления его движения и/или скорости движения обнаруженного объекта. Согласно еще одному из вариантов реализации, дополнительно могут производить определение координат обнаруженного подводного объекта на основании сравнения временных задержек сигнала, принятого приемными элементами разных приемных антенн гидроакустического устройства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0019] Система и способ согласно настоящему изобретению будут далее описаны более подробно со ссылкой на сопроводительные чертежи, где:
[0020] на ФИГ. 1 представлено схематичное изображение гидроакустической системы согласно одному из вариантов реализации изобретения,
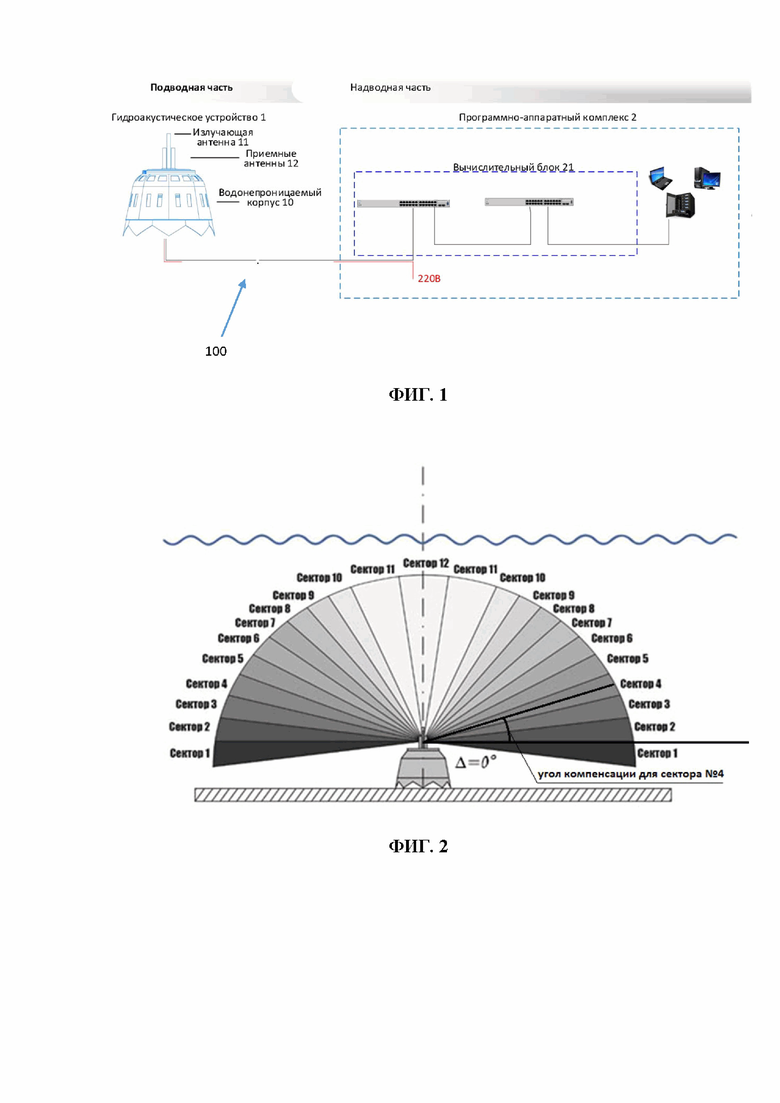
[0021] на ФИГ. 2 показано схематичное изображение секторов излучения и приема одного элемента антенн гидроакустического устройства предлагаемой гидроакустической системы,
[0022] на ФИГ. 3 показано схематичное изображение секторов излучения и приема одного элемента антенн гидроакустического устройства предлагаемой гидроакустической системы с настроенной относительно препятствий дальностью обнаружения,
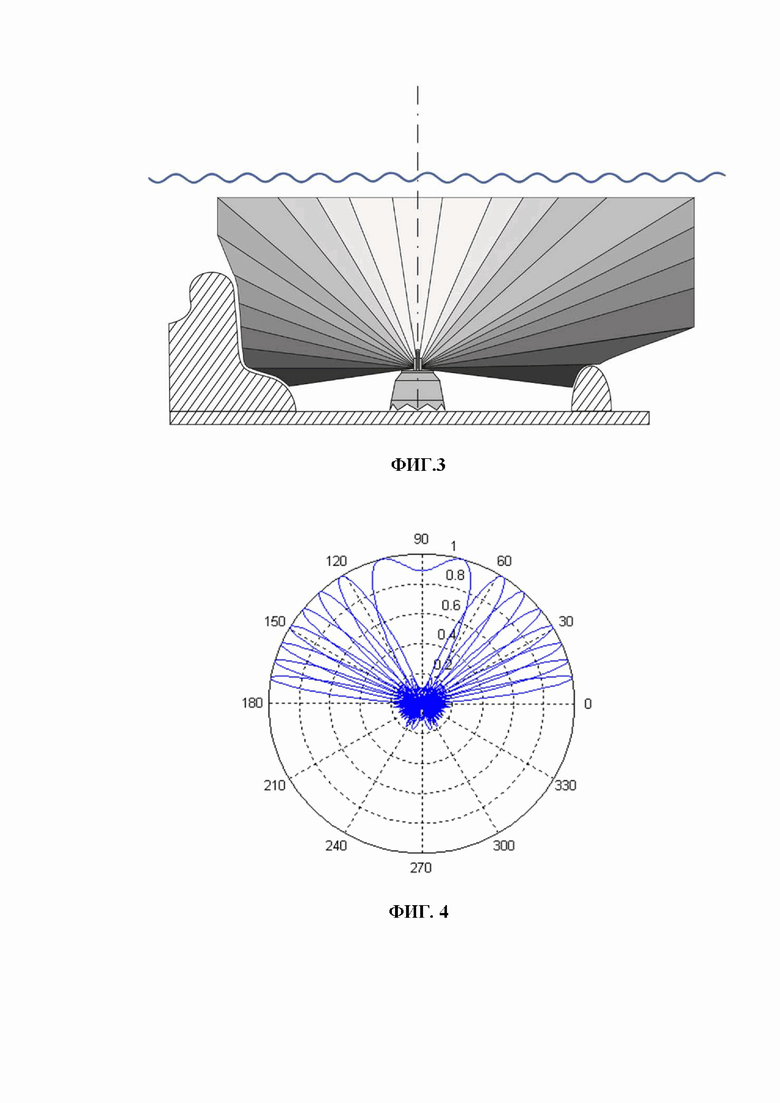
[0023] на ФИГ. 4 показан общий вид охвата диаграммами направленности элемента излучающей 9-элементной антенны верхней полусферы подводного пространства для 8 углов компенсации с перекрытием главных лепестков по уровню 1,5 дБ,
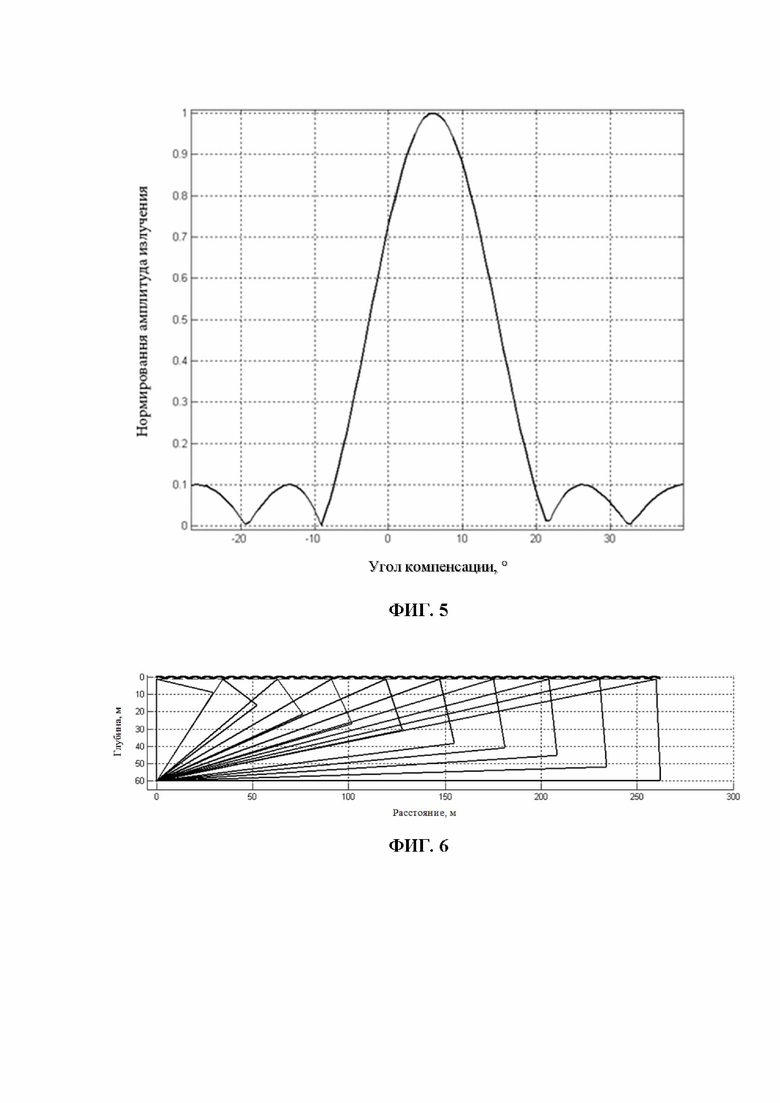
[0024] на ФИГ. 5 представлен пример диаграммы направленности элемента излучающей 9-элементной антенны после оптимизации весовыми коэффициентами Дольфа-Чебышева с углом компенсации 6°,
[0025] на ФИГ. 6 показан схематично пример перекрытия главных лепестков диаграмм направленности элемента антенны,
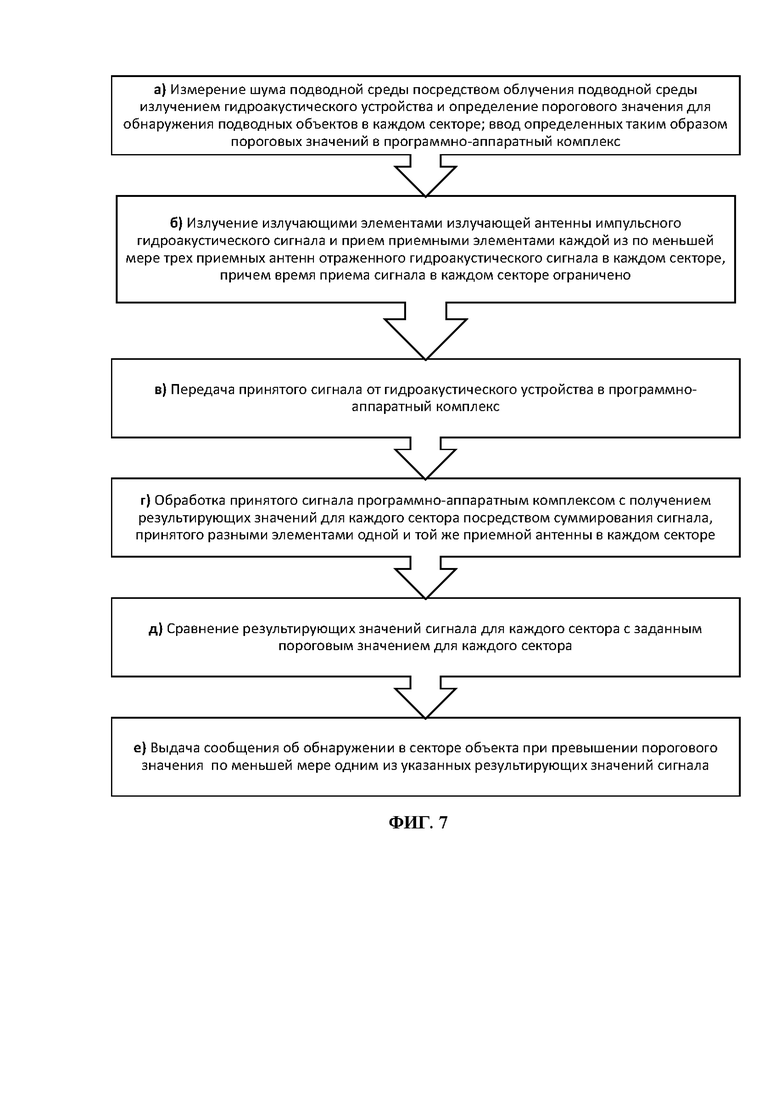
[0026] на ФИГ. 7 представлена блок-схема, иллюстрирующая этапы способа обнаружения подводных объектов с использованием предлагаемой гидроакустической системы.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0027] На ФИГ. 1 представлено схематичное изображение гидроакустической системы 100 для обнаружения подводных объектов согласно одному из вариантов реализации. Система 100 содержит гидроакустическое устройство 1, содержащее водонепроницаемый корпус 10, на котором расположена одна излучающая антенна 11 и по меньшей мере три приемные антенны 12, состоящие из излучающих и приемных элементов, соответственно. Дополнительные антенны могут быть установлены для обеспечения точности, а также для целей контроля полученных данных. Также в водонепроницаемом корпусе 1 может быть размещен источник электропитания (не показан), подающий электропитание на элементы антенн гидроакустического устройства. Система 100 также содержит программно-аппаратный комплекс 2, соединенный с гидроакустическим устройством 1 с возможностью обмена данными. Кроме того, через программно-аппаратный комплекс 2 возможна подача электропитания от источника электропитания на указанные одну излучающую антенну 11 и по меньшей мере три приемные антенны 12. Программно-аппаратный комплекс 2 содержит вычислительный блок 21 и соединен с гидроакустическим устройством 1 с возможностью получения и обработки сигналов, а также с возможностью передачи управляющих сигналов источнику электропитания для управления работой указанных одной излучающей антенны 11 и по меньшей мере трех приемных антенн 12.
[0028] При работе гидроакустической системы, согласно настоящему изобретению, гидроакустическое устройство 1 размещается под водой в выбранном месте контролируемой акватории, формируя подводную часть системы. При выборе места спуска руководствуются данными о глубине и равномерности дна, а также о наличии препятствий, способных создавать помехи или зоны неуверенного приема. Указанные данные могут быть заранее введены в программно-аппаратный комплекс 2 или могут быть определены непосредственно гидроакустической системой 100. Для спуска устройства 1 и его размещения и/или закрепления в выбранном местоположении на дне акватории на корпусе 10 могут быть предусмотрены специальные удерживающие средства. Программно-аппаратный комплекс 2 представляет собой надводную часть системы и может быть расположен на берегу поблизости контролируемой акватории, на судне или в другом местоположении, позволяющем обеспечить связь между элементами гидроакустической системы. Гидроакустическое устройство 1 может быть соединено с программно-аппаратным комплексом 2 посредством комбинированного кабеля, проложенного по подводной части акватории и надводной части суши, прилегающей к акватории, при этом комбинированный кабель включает в себя по меньшей мере кабель для передачи электропитания и кабель для передачи данных, такой как оптоволоконный кабель.
[0029] Излучающая антенна 11 состоит из по меньшей мере девяти излучающих элементов, расположенных рядом друг с другом, предпочтительно выполненных из пьезокерамического материала. При конструировании антенн для выбора размеров и расстояния между элементами антенн руководствуются длинами волн используемых гидроакустических сигналов. Так, предпочтительно, чтобы расстояние между центрами соседних элементов антенны было сопоставимо с длиной волны гидроакустического сигнала, например, было меньше длины волны гидроакустического сигнала, в частности составляло половину длины волны гидроакустического сигнала. Выбор числа элементов для излучающей антенны 11 обусловлен необходимостью обеспечения оптимальной ширины луча. Так, например, при использовании антенны с девятью излучающими элементами ширина луча составит 12°, а при использовании антенны с десятью излучающими элементами - 6° и т.д. Эмпирически обнаружено, что использование антенн с количеством элементов, меньшим девяти, приводит к слишком широкому лучу, что негативно сказывается на точности и надежности результатов обнаружения подводных объектов. С целью исключения влияния донной реверберации излучающая антенна 11 выполнена с возможностью излучения гидроакустического сигнала в верхнюю полусферу. Дальность излучения определяется мощностью излучающей антенны 11, которая определяется напряжением, подаваемым на ее элементы источником электропитания. Элементы излучающей антенны 11 выполнены с возможностью регулировки их секторных диаграмм направленности посредством управляющих сигналов от программно-аппаратного комплекса 2, при этом выбор направления излучения производят на основании данных о контролируемой акватории, например, данных о наличии отмелей или других препятствий, способных создавать дополнительные реверберационные помехи. Такие данные могут вводиться оператором, для чего в программно-аппаратном комплексе 2 предусмотрен интерфейс ввода-вывода данных, реализованный в виде персонального компьютера, ноутбука, планшетного компьютера или любого подходящего средства, позволяющего взаимодействовать с программной частью комплекса 2. Также указанные данные могут быть определены самой гидроакустической системой 100. Программно-аппаратный комплекс 2 также может иметь средства для хранения и выдачи указанной информации. Также указанные данные могут быть сохранены в программно-аппаратном комплексе с возможностью извлечения.
[0030] Каждая из по меньшей мере трех приемных антенн 12 состоит из по меньшей мере двенадцати приемных элементов, расположенных рядом друг с другом, предпочтительно выполненных из пьезокерамического материала. Принцип выбора размеров и расположения приемных элементов в приемной антенне 12 аналогичен принципу конструирования излучающей антенны 11. Приемные элементы приемной антенны 12 так же выполнены с возможностью работы - приема гидроакустического сигнала, в верхней полусфере.
[0031] Каждый излучающий или приемный элемент излучающей или приемной антенны 11 или 12, соответственно, имеет секторную диаграмму направленности. Выбор секторов излучения и приема производится так, чтобы обеспечивался охват всей верхней полусферы подводной среды, например, как показано на ФИГ. 2. Каждому сектору при этом должна соответствовать своя диаграмма направленности, причем для обеспечения точности работы системы указанная диаграмма направленности предпочтительно состоит из по существу одного лепестка, в котором излучается/принимается сигнал. В предложенной системе используется цифровое диаграммообразование, то есть для каждого элемента формируются диаграммы направленности для множества секторов. Принципы формирования и оптимизации диаграмм направленности будут описаны далее в настоящем документе.
[0032] Когда элементы излучающей антенны 11 излучают гидроакустический сигнал, его распространение происходит в выбранной регулировками ее секторной диаграммы направленности области. При наличии в такой области подводного объекта гидроакустический сигнал отражается от него и приходит в виде отраженного сигнала на элементы приемных антенн 12. Элементы приемных антенн 12 также имеют регулируемые управляющими сигналами программно-аппаратного комплекса 2 секторные диаграммы направленности, при этом набор диаграмм направленности (ФИГ. 2) элементов приемных антенн 12 должен быть сформирован таким образом, чтобы охватывать всю область контролируемого пространства. Предпочтительно настраивать секторы приема так, чтобы было исключено влияние реверберации от поверхности акватории (поверхностной реверберации), дна, берега или иных препятствий, то есть настраивать соответствующую дальность излучения или время приема в каждом секторе, например, как показано на ФИГ. 3. Использование в приемной антенне 12 по меньшей мере двенадцати приемных элементов позволяет дополнительно повысить чувствительность и точность системы. Принципы ограничения времени приема отраженного гидроакустического сигнала приемными элементами приемных антенн 12 будут описаны далее в настоящем документе.
[0033] Диаграмма направленности каждого элемента антенны содержит главный лепесток, в котором излучается наибольшее количество энергии, и побочные лепестки: боковые и задний, имеющий максимум в направлении, приблизительно обратном направлению максимума главного лепестка. Излучение, исходящее в побочные лепестки, является нежелательным, так как уменьшает эффективность антенны, увеличивая реверберации. Таким образом, предпочтительно формировать диаграмму направленности так, чтобы уровень побочных лепестков был минимальным. Кроме того, для того, чтобы обеспечивался эффективный контроль всей области контролируемой акватории, главный лепесток диаграммы направленности антенны должен иметь минимальную ширину, чтобы набор таких главных лепестков для разных секторов излучения и приема - для разных фазовых сдвигов, обеспечивал надежное излучение и/или прием во всей области контролируемой акватории.
[0034] Диаграмму направленности строят по классической формуле (1):
 (1)
(1)
где n - число элементов в антенне;
d - расстояние между элементами, м;
f - частота излучения/приема, с-1;
c - скорость звука в воде, м/с;
α0 - угол компенсации диаграммы направленности, °;
α - угол от 0° до 359°.
[0035] В результате для примера для элемента излучающей антенны, состоящей из девяти элементов, диаграммы направленности имеют вид, показанный на ФИГ. 4, где приведен охват для восьми секторов (восьми углов компенсации). В таблице 1 приведены данные по ширине лепестков диаграммы направленности на различных углах компенсации, то есть углах относительно горизонта, в которых направляется главный лепесток диаграммы направленности. Для выбора углов компенсации диаграммы направленности - то есть, секторов излучения и приема, были приняты следующие параметры:
- рабочая частота: 50 кГц;
- скорость звука в среде: 1500 м/с;
- количество элементов в антенне: 9;
- расстояние между элементами антенны: половина длины волны, 0,015 м.
[0036] При формировании диаграммы направленности указанным выше способом уровень боковых лепестков остается значительным, что уменьшает мощность излучения в главном лепестке и повышает уровень помех при приеме сигналов. Для формирования диаграммы направленности с заданным уровнем боковых лепестков дополнительно применяют амплитудную оптимизацию - преобразование Дольфа-Чебышева, к элементам антенны по формуле (2):
 (2)
(2)
где Ap - амплитуда главного лепестка р-того элемента антенны после оптимизации;
p - номер элемента, для которого рассчитывается оптимизированное значение амплитуды;
k - номера перебираемых элементов антенны,
причем  ;
;
n=(N-1)/2, где N - общее количество элементов в антенне;
 ;
;
а - амплитуда главного лепестка диаграммы направленности элемента антенной решетки (до оптимизации одинаковая для всех элементов).
[0037] На ФИГ. 5 показан пример диаграммы направленности, полученной после такой оптимизации весовыми коэффициентами Дольфа-Чебышева для линейной антенной решетки из девяти элементов и угла компенсации 6°. В результате оптимизации уровень боковых лепестков не превышает 10% от уровня главного лепестка, то есть обеспечивается направление излучения по существу в одном направлении для сектора, что повышает точность работы системы.
[0038] Для обеспечения эффективного контроля всей контролируемой области предпочтительно формировать диаграмму направленности таким образом, чтобы обеспечивалось перекрытие и главных лепестков диаграмм направленности, формируемых для каждого сектора. Перекрытие обеспечивается введением временных задержек между сигналами с соседних элементов антенны. Необходимая временная задержка определяется углом компенсации диаграммы направленности по формуле (3):
 (3)
(3)
где dt - необходимая временная задержка между сигналами с соседних элементов антенны, с;
d - расстояние между центрами соседних элементов антенны, м;
α0 - угол компенсации диаграммы направленности, °;
с - скорость звука в воде, м/с.
[0039] Также необходимо ограничивать дальность приема, то есть требуемую дальность обнаружения, для того, чтобы исключить выход сигнала за водную поверхность, приводящий к усилению поверхностной реверберации, или исключить влияние других препятствий, способствующих реверберации. Для этого необходимо ограничить время приема в каждом секторе с учетом данных о подводной среде. Для различных секторов - различных углов компенсации, время, необходимое звуковой волне для прохождения на максимально возможное расстояние и обратно, будет различаться. При этом необходимо избегать возможного отражения от поверхности, для чего следует рассчитывать время хода луча нужно для расстояния от гидроакустического устройства 1 до некоторой горизонтальной поверхности, расположенной на глубине, не досягаемой для волнения. Аналогично, при работе системы можно учитывать наличие других препятствий, способствующих реверберации, чтобы исключить их влияние на надежность обнаружения объектов в акватории. Определение глубины, не досягаемой для волнения, производится на основании известных или определенных характеристик контролируемой акватории. Кроме того, в расчетах времени хода необходимо использовать угол, по которому главный лепесток диаграммы направленности достигает обозначенной горизонтальной поверхности быстрее всего. Указанный угол может быть вычислен на основании известного угла компенсации и ширины (амплитуды) главного лепестка по формуле (4):
 (4)
(4)
где  - угол, по которому главный лепесток диаграммы направленности достигает горизонтальной поверхности быстрее всего, °;
- угол, по которому главный лепесток диаграммы направленности достигает горизонтальной поверхности быстрее всего, °;
α0 - угол компенсации диаграммы направленности, °;
А - амплитуда главного лепестка диаграммы направленности, °.
[0040] Таким образом, время, за которое гидроакустический сигнал достигает обозначенной глубины, не досягаемой для волнения, можно вычислить по формуле (5):
 (5)
(5)
где t - время, с;
h - глубина, на которой расположено гидроакустическое устройство 1, относительно глубины, не досягаемой для волнения, м;
с - скорость звука в воде, м/с;
- угол, по которому главный лепесток диаграммы направленности достигает горизонтальной поверхности быстрее всего, °.
[0041] Аналогичным образом определяют время, за которое гидроакустический сигнал достигает других объектов в акватории, способствующих реверберации. Такими объектами могут являться дно акватории, берега, отмели, стационарные объекты - стенки, камни, или иные препятствия. В настоящем изобретении время приема ограничивают для каждого сектора на основании данных об акватории. Программно-аппаратный комплекс 2 гидроакустической системы 100 может быть выполнен с возможностью хранения и выдачи таких данных по запросу пользователя. Также указанные данные могут определяться системой в начале работы - в этом случае производится излучение гидроакустического сигнала излучающими элементами излучающей антенны 11, имеющейся в системе 100, прием отраженного от препятствий гидроакустического сигнала приемными элементами по меньшей мере трех приемных антенн 12, имеющихся в системе 100, причем на данном этапе не вводятся ограничения по времени приема, и обработка полученных данных программно-аппаратным комплексом 2 с получением для каждого сектора времени, через которое приемным элементам приемных антенн 12 гидроакустического устройства 1 системы 100 приходит сигнал, отраженный от препятствия. Далее, с учетом этого времени программно-аппаратным комплексом 2 для каждого сектора задается ограничение времени приема. Предпочтительно, время приема ограничивается как 95%, 90% или менее времени хода сигнала от препятствия.
[0042] Таким образом, как следует из вышеприведенного описания, в контролируемом пространстве для каждого элемента каждой антенны будет сформирован набор диаграмм направленности, состоящий из главных лепестков сформированных диаграмм направленности. На ФИГ. 6 показано схематичное изображение примера веера таких диаграмм направленности для антенны, состоящей из девяти элементов, с перекрытием секторов.
[0043] Вышеприведенное описание описывает основные принципы конструирования и настройки гидроакустической системы 100 согласно настоящему изобретению. Функционирование системы 100 и реализация способа обнаружения подводных объектов с ее применением будет описано ниже со ссылкой на ФИГ. 7.
[0044] Обнаружение подводного объекта согласно предложенному способу осуществляется на основании сравнения обработанных сигналов, полученных элементами приемных антенн 12 гидроакустического устройства 1 - отраженных гидроакустических сигналов, с некоторым заданным пороговым значением. Определение порогового значения производят на этапе а) способа обнаружения подводных объектов посредством фиксирования элементами приемных антенн 12 гидроакустического устройства 1 шума акватории в режиме облучения излучающей антенной 11 подводной среды собственным излучением гидроакустического устройства 1. При этом для каждого сектора вычисляется отдельное пороговое значение сигнала. Для формирования статистической оценки уровня шумов и их дисперсии фиксируют шумы в течении не менее 10 периодов излучения-приема. В каждом периоде излучения-приема принятый сигнал разбивается на равные отрезки, в каждом отрезке вычисляется энергия сигнала и ее дисперсия. После достижения глубины статистической оценки не менее 10 циклов излучения-приема, формируется пороговое значение сигнала в каждом отрезке, равное математическому ожиданию энергии сигнала с границами разброса значений, равными дисперсии умноженной на коэффициент kσ. Значение коэффициента kσ подбирается алгоритмом оценивания пороговых значений автоматически в зависимости от количества обнаруженных явлений в текущем цикле. Если количество обнаруженных явлений в текущем цикле меньше заранее установленного порога, то значение kσ уменьшается на определенную заданную величину шага, если количество явлений больше порога, значение kσ увеличивается на тот же шаг.
[0045] Полученные для каждого сектора пороговые значения вводят в программно-аппаратный комплекс 2 гидроакустической системы 100.
[0046] После ввода в программно-аппаратный комплекс 2 гидроакустической системы 100 пороговых значений гидроакустическая система 100 начинает работу по обнаружению подводных объектов. Элементы излучающей антенны 11 гидроакустического устройства 1 на этапе б) излучают импульсный гидроакустический сигнал, который отражается от подводных объектов и возвращается к гидроакустическому устройству 1. Здесь приемные элементы приемных антенн 12 принимают отраженный сигнал в каждом секторе. Длительность импульсов может быть настроена от 1 до 100 мс. При этом, за счет наличия в конструкции антенн системы 100 множества элементов, расположенных в одном местоположении, и за счет возможности программно-аппаратного комплекса 2 управлять работой указанных антенн с формированием необходимого для охвата всего объема отслеживаемой акватории набора диаграмм направленности, система 100 может точно и надежно отслеживать весь объем контролируемой акватории, ограничивая время приема сигнала с учетом расстояния до поверхности, дна или других препятствий, которые могут оказывать негативное влияние на сигнал.
[0047] Далее на этапе в) способа принятый сигнал передают от гидроакустического устройства 1 программно-аппаратному комплексу 2.
[0048] На следующем этапе г) программно-аппаратный комплекс 2 обрабатывает полученный сигнал. На этом этапе программно-аппаратный комплекс 2 для каждой антенны производит суммирование сигналов, принятых каждым элементом соответствующей антенны в одном секторе. В результате такого суммирования для каждой из по меньшей мере трех приемных антенн 12 получают набор результирующих значений сигнала для каждого сектора. Кроме того, формирование набора диаграмм направленности с перекрытием главных лепестков обеспечивает перекрестное обнаружение объекта в разных секторах, что дополнительно повышает вероятность достоверного обнаружения подводных объектов.
[0049] После этого на этапе д) способа программно-аппаратный комплекс 2 сравнивает полученное для каждой приемной антенны 12 результирующее значение сигнала для каждого сектора с ранее введенным пороговым значением для этого сектора. На основании сравнения полученного значения сигнала с пороговым значением система 100 делает вывод об обнаружении подводного объекта в секторе при превышении заданного порогового значения по меньшей мере одним из указанных результирующих значений сигнала и выдает сообщение об обнаружении подводного объекта в этом секторе.
[0050] Ввиду расположения элементов каждой приемной антенны 12 на предельно малом расстоянии друг от друга, принимаемый ими сигнал от подводного объекта является идентичным, что позволяет при усилении - суммировании, получать надежный сигнал, сравнение которого с высокой точностью позволяет определять наличие в контролируемой акватории подводного объекта.
[0051] Кроме того, наличие в гидроакустическом устройстве 1 по меньшей мере трех приемных антенн 12 позволяет дополнительно обеспечивать высокую надежность обнаружения подводных объектов за счет надежного разграничения случайных сигналов и сигналов, отраженных от подводного объекта. Также наличие в системе по меньшей мере трех приемных антенн 12 позволяет фиксировать координаты подводного объекта посредством анализа временных задержек, с которыми сигнал приходит на элементы указанных антенн.
[0052] Дополнительно, гидроакустическая система 100 обнаружения подводных объектов выполнена с возможностью проведения поведенческого анализа обнаруженного в каком-либо секторе объекта - устанавливать его неподвижность, направление движения и/или скорость движения обнаруженного объекта. Для этого этапы б)-д) способа выполняют неоднократно. Перемещение обнаруженного подводного объекта также может отслеживаться на основании данных о средней скорости движения подводных объектов, угле, размере и гидроакустическом отклике от указанных объектов, для чего в программно-аппаратный комплекс 2 могут быть введены и сохранены в нем указанные данные.
[0053] Вывод информации об обнаружении подводного объекта может быть реализован в различном виде, например, в виде звукового сигнала и/или текстового сообщения, и/или в виде графического уведомления. Предпочтительно, при обнаружении подводного объекта оператору показывается уведомление на дисплее интерфейса ввода-вывода данных программно-аппаратного комплекса 2, а также звучит звуковой сигнал.
[0054] Программно-аппаратный комплекс 2 гидроакустической системы 100 также может быть выполнен с возможностью вывода на дисплей интерфейса ввода-вывода данных информации об обнаружении подводного объекта в графическом виде на карте, которая загружается оператором в программно-аппаратный комплекс 2. На указанной карте могут быть отражены обнаруженные подводные объекты, а также их перемещение. Кроме того, гидроакустическая система 100 может быть выполнена с возможностью одновременного вывода нескольких видов информации об обнаружении подводного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645016C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ ПРИ ИХ ВТОРЖЕНИИ В ОХРАНЯЕМУЮ ЗОНУ | 2013 |
|
RU2559701C2 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| АРКТИЧЕСКАЯ ПОДВОДНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ И НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ НАДВОДНЫХ И ПОДВОДНЫХ ОБЪЕКТОВ НАВИГАЦИИ В СТЕСНЕННЫХ УСЛОВИЯХ ПЛАВАНИЯ | 2015 |
|
RU2596244C1 |
| Способ гидроакустического поиска автономного донного подводного объекта | 2019 |
|
RU2727331C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ОБЛАСТЬ НАТУРНОГО ВОДОЕМА | 1999 |
|
RU2150123C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МОРСКИХ ОБЪЕКТОВ ПРИ ВСПЛЫТИИ ПОДВОДНОГО АППАРАТА | 2002 |
|
RU2215304C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОРЫВА ПОДВОДНОГО ТРУБОПРОВОДА | 2001 |
|
RU2196931C2 |
Использование: изобретение относится к области гидроакустики. Сущность: предложена гидроакустическая система для обнаружения подводных объектов, содержащая гидроакустическое устройство и программно-аппаратный комплекс. Гидроакустическое устройство содержит водонепроницаемый корпус, одну излучающую и по меньшей мере три приемные антенны, расположенные на корпусе, а также источник электропитания, расположенный внутри корпуса. Антенны гидроакустического устройства выполнены с возможностью излучения и приема гидроакустических сигналов в верхней полусфере, причем излучающая антенна состоит из по меньшей мере девяти излучающих элементов, каждая из указанных по меньшей мере трех приемных антенн состоит из по меньшей мере двенадцати приемных элементов, а источник электропитания выполнен с возможностью подачи электропитания на элементы указанных излучающей и приемной антенн. Программно-аппаратный комплекс гидроакустической системы содержит вычислительный блок и соединен с гидроакустическим устройством с возможностью управления работой антенн посредством управляющих сигналов и с возможностью получения и обработки сигналов, принимаемых каждой из указанных по меньшей мере трех приемных антенн. При этом программно-аппаратный комплекс гидроакустической системы выполнен с возможностью формирования секторных диаграмм направленности для каждого элемента каждой из излучающей и по меньшей мере трех приемных антенн, причем сектора выбираются таким образом, чтобы обеспечивать охват верхней полусферы, а диаграмма направленности оптимизирована преобразованием Дольфа-Чебышева, а также с возможностью определения порогового значения сигнала для каждого сектора. Обработка сигналов программно-аппаратным комплексом включает для каждой из по меньшей мере трех приемных антенн суммирование сигналов, принятых разными элементами соответствующей приемной антенны в одном секторе, для получения результирующего значения сигнала для каждого сектора приема. Также программно-аппаратный комплекс выполнен с возможностью выдачи сообщения об обнаружении в секторе подводного объекта на основании сравнения результирующего значения сигнала для каждого сектора с пороговым значением, соответствующим указанному сектору, при превышении заданного порогового значения результирующим значением сигнала для по меньшей мере одной из указанных по меньшей мере трех приемных антенн. Также предложен способ обнаружения подводных объектов с использованием такой гидроакустической системы. Технический результат: повышение точности и надежности обнаружения подводных объектов за счет уменьшенного влияния поверхностной и донной реверберации, а также исключения влияния на прием посторонних объектов, расположенных в пределах контролируемой акватории. 2 н. и 16 з.п. ф-лы, 7 ил., 1 табл.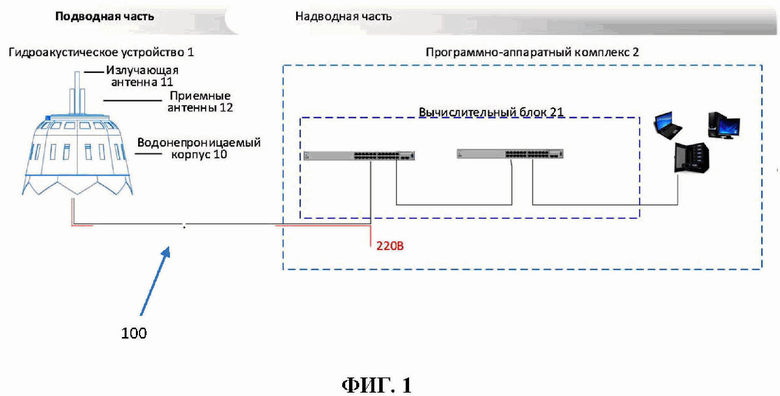
1. Гидроакустическая система для обнаружения подводных объектов, которая содержит:
гидроакустическое устройство, содержащее:
- водонепроницаемый корпус,
- одну излучающую и по меньшей мере три приемные антенны, расположенные на указанном корпусе, причем указанная излучающая антенна выполнена с возможностью излучения гидроакустического сигнала в верхнюю полусферу, указанные по меньшей мере три приемные антенны выполнены с возможностью приема гидроакустического сигнала в верхней полусфере, а каждая из указанных излучающей и по меньшей мере трех приемных антенн состоит из излучающих и приемных элементов соответственно,
- источник электропитания, размещенный в водонепроницаемом корпусе с возможностью подачи электропитания на элементы указанных излучающей и по меньшей мере трех приемных антенн,
и программно-аппаратный комплекс, содержащий вычислительный блок и соединенный с гидроакустическим устройством с возможностью передачи управляющих сигналов на источник электропитания для управления работой указанных антенн и с возможностью получения и обработки сигналов, принимаемых каждой из указанных по меньшей мере трех приемных антенн, с получением результирующего сигнала,
отличающаяся тем, что
указанная излучающая антенна состоит из по меньшей мере девяти излучающих элементов, каждая из указанных по меньшей мере трех приемных антенн состоит из по меньшей мере двенадцати приемных элементов,
программно-аппаратный комплекс выполнен с возможностью формирования секторных диаграмм направленности для каждого излучающего элемента излучающей антенны и формирования секторных диаграмм направленности для каждого приемного элемента каждой из по меньшей мере трех приемных антенн, причем сектора выбираются таким образом, чтобы обеспечивать охват верхней полусферы, а диаграмма направленности соответствующего излучающего или приемного элемента в каждом секторе оптимизирована преобразованием Дольфа-Чебышева, с возможностью получения данных о подводной среде и ограничения времени приема отраженного гидроакустического сигнала в каждом секторе на основании этих данных, а также с возможностью определения порогового значения сигнала для каждого сектора посредством облучения подводной среды излучением гидроакустической системы,
при этом обработка сигналов программно-аппаратным комплексом включает для каждой из по меньшей мере трех приемных антенн суммирование сигналов, принятых разными элементами этой приемной антенны в одном секторе, для получения результирующего значения сигнала для этого сектора, а
программно-аппаратный комплекс также выполнен с возможностью выдачи сообщения об обнаружении подводного объекта на основании сравнения результирующего значения сигнала каждого сектора с заданным программно-аппаратному комплексу пороговым значением, соответствующим указанному сектору, при превышении указанного порогового значения результирующим значением сигнала для по меньшей мере одной из указанных по меньшей мере трех приемных антенн.
2. Гидроакустическая система по п. 1, отличающаяся тем, что излучающие и приемные элементы в соответствующих антеннах расположены на расстоянии, меньшем длины волны гидроакустического сигнала.
3. Гидроакустическая система по п. 1, отличающаяся тем, что программно-аппаратный комплекс выполнен с возможностью выбора секторов и формирования в них диаграмм направленности для элементов антенн таким образом, чтобы обеспечить перекрытие диаграмм направленности.
4. Гидроакустическая система по п. 3, отличающаяся тем, что программно-аппаратный комплекс обеспечивает перекрытие диаграмм направленности по уровню главного лепестка 0,7.
5. Гидроакустическая система по п. 1, отличающаяся тем, что программно-аппаратный комплекс выполнен с возможностью хранения и выдачи данных о подводной среде.
6. Гидроакустическая система по п. 1, отличающаяся тем, что программно-аппаратный комплекс выполнен с возможностью определения данных о подводной среде путем излучения гидроакустического сигнала излучающими элементами излучающей антенны, приема отраженного гидроакустического сигнала приемными элементами приемных антенн без ограничения времени приема и обработки полученных данных программно-аппаратным комплексом.
7. Гидроакустическая система по п. 1, отличающаяся тем, что гидроакустическое устройство и программно-аппаратный комплекс соединены посредством комбинированного кабеля.
8. Гидроакустическая система по п. 1, отличающаяся тем, что программно-аппаратный комплекс включает интерфейс ввода-вывода данных, выполненный с возможностью выдачи сообщения об обнаружении подводного объекта, которое может представлять одно или более из следующего: звуковой сигнал, текстовое сообщение, графическое сообщение на дисплее интерфейса ввода-вывода данных.
9. Гидроакустическая система по п. 1, отличающаяся тем, что программно-аппаратный комплекс выполнен с возможностью, при обнаружении по меньшей мере в одном секторе подводного объекта, устанавливать неподвижность обнаруженного объекта, а также направление движения и/или скорость движения обнаруженного объекта.
10. Гидроакустическая система по п. 1, отличающаяся тем, что программно-аппаратный комплекс выполнен с возможностью, при обнаружении по меньшей мере в одном секторе подводного объекта, определения координат обнаруженного объекта на основании сравнения временных задержек сигнала, принятого приемными элементами разных приемных антенн гидроакустического устройства.
11. Способ обнаружения подводных объектов с использованием гидроакустической системы по любому из пп. 1-10, который включает:
а) измерение гидроакустическим устройством шума подводной среды посредством облучения подводной среды излучением гидроакустического устройства, определение порогового значения для обнаружения подводных объектов в каждом секторе на основании измеренного шума и введение определенных таким образом пороговых значений в программно-аппаратный комплекс;
б) излучение излучающими элементами излучающей антенны гидроакустического сигнала и прием приемными элементами каждой из по меньшей мере трех приемных антенн отраженного гидроакустического сигнала в каждом секторе;
в) передача принятого сигнала от гидроакустического устройства в программно-аппаратный комплекс;
г) обработка программно-аппаратным комплексом принятого сигнала с получением результирующих значений сигнала для каждого сектора;
д) сравнение результирующих значений сигнала для каждого сектора с заданным пороговым значением для каждого сектора; и
е) выдача сообщения об обнаружении в секторе объекта при превышении порогового значения по меньшей мере одним из указанных результирующих значений сигнала,
отличающийся тем, что
перед этапом а) формируют секторные диаграммы направленности для каждого излучающего элемента излучающей антенны и секторные диаграммы направленности для каждого приемного элемента каждой из по меньшей мере трех приемных антенн, причем сектора выбираются таким образом, чтобы обеспечивать охват верхней полусферы, а диаграмму направленности соответствующего излучающего или приемного элемента в каждом секторе оптимизируют преобразованием Дольфа-Чебышева;
получают данные о подводной среде и ограничивают на основании этих данных время приема отраженного гидроакустического сигнала в каждом секторе; при этом
на этапе а) для определения пороговых значений для каждого сектора излучают гидроакустический сигнал излучающими элементами излучающей антенны, принимают отраженный гидроакустический сигнал приемными элементами всех из по меньшей мере трех приемных антенн, после чего вычислительный блок программно-аппаратного комплекса рассчитывает пороговые значения сигнала для каждого сектора,
на этапе г) обработки отраженного гидроакустического сигнала для каждой приемной антенны производят суммирование сигналов, принятых разными приемными элементами этой антенны в одинаковых секторах, после чего для каждого сектора получают результирующее значение сигнала для каждой приемной антенны.
12. Способ по п. 11, в котором на этапе формирования программно-аппаратным комплексом секторных диаграмм направленности для каждого излучающего элемента излучающей антенны и секторных диаграмм направленности для каждого приемного элемента каждой из по меньшей мере трех приемных антенн сектора выбирают таким образом, чтобы обеспечить перекрытие в них диаграмм направленности.
13. Способ по п. 12, в котором перекрытие диаграмм направленности обеспечивают по уровню главного лепестка 0,7.
14. Способ по п. 11, в котором на этапе получения данных о подводной среде данные извлекают из сохраненных в программно-аппаратном комплексе данных о подводной среде.
15. Способ по п. 11, в котором на этапе получения данных о подводной среде данные получают путем излучения гидроакустического сигнала излучающими элементами излучающей антенны, приема отраженного гидроакустического сигнала приемными элементами каждой из указанных по меньшей мере трех приемных антенн без ограничения времени приема и обработки полученных данных программно-аппаратным комплексом для получения данных о подводной среде.
16. Способ по п. 11, в котором на этапе е) сообщение об обнаружении подводного объекта выдают в виде одного или более из следующего: звуковой сигнал, текстовое сообщение или графическое уведомление на дисплее интерфейса ввода-вывода данных.
17. Способ по п. 11, в котором повторяют этапы б)-д) при обнаружении подводного объекта по меньшей мере в одном секторе для установления неподвижности обнаруженного объекта, направления движения и/или скорости движения обнаруженного объекта.
18. Способ по п. 11, в котором при обнаружении подводного объекта производят определение его координат на основании сравнения временных задержек сигнала, принятого приемными элементами разных приемных антенн гидроакустического устройства.
| УСТРОЙСТВО ОБНАРУЖЕНИЯ УЗКОПОЛОСНЫХ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2007 |
|
RU2367970C2 |
| Способ определения изменения скорости движения шумящего объекта | 2020 |
|
RU2757075C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2736188C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| US 6473363 B1, 29.10.2002. | |||

