Изобретение относится к средствам механизации операций передачи изделий из одной позиции в другую (от машине к машине) и может быть использовано преимущественно в различных технологических процессах для реализации вспомогательных операций. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис. а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами в линиях высокой производительности.
Известно также устройство типа “рука” для передачи изделий, содержащее комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном, исполнительного механизма с выходными звеньями, последние из которых снабжены губками для захвата изделий, и привода (патент №2191108 (РФ), публ. в БИПМ, 2002. - №29) - прототип. Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основным недостатком прототипа является сравнительно большое число движущихся масс (конструктивных элементов) и пар трения, которые увеличивают энергозатраты на процесс передачи изделий, снижают точность работы и производительность устройства. Увеличение движущихся масс приводит к необходимости уменьшения скорости движения звеньев, а это удлиняет период рабочего цикла (снижает производительность). Зазоры в большом количестве кинематических пар приводят к ошибкам положения и перемещения звеньев. Это снижает точность работы устройства.
Задачей настоящего изобретения является упрощение конструкции, повышение точности работы и производительности устройства.
Решение поставленной задачи достигается тем, что в устройстве типа “рука” для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном в виде ползуна, исполнительного механизма с выходными звеньями, последние из которых снабжены губками для захвата изделий и подвижно соединены с выходными звеньями передаточного механизма, и привода, подвижное соединение выходных звеньев исполнительного и передаточного механизмов содержит пружины и упор для фиксированного положения выходных звеньев исполнительного механизма относительно ползуна в интервалах прямого и обратного ходов устройства, при этом упор жестко закреплен на концевой части ползуна, а фиксированному положению выходных звеньев соответствует сжатое положение губок.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов (звеньев и кинематических пар) и наличием связи между элементами, обеспечивающими упрощение конструкции, повышение точности передачи изделий и производительности.
Включение в подвижное соединение выходных звеньев исполнительного и передаточного механизмов пружин и упора уменьшает число подвижных звеньев и пар трения в кинематической цепи упомянутых механизмов. Это упрощает конструкцию, снижает энергозатраты на преодоление сил трения и масс движущихся звеньев, уменьшает ошибки положения и перемещения выходных звеньев исполнительного механизма. Последнее повышает точность функционирования устройства.
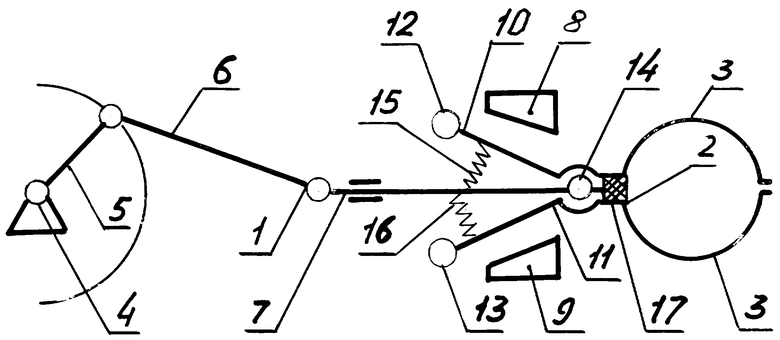
На чертеже представлено устройство типа “рука” для передачи изделий, кинематическая схема.
Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма 1, исполнительного механизма 2 с губками 3 для захвата изделий и привода 4, последний на чертеже не показан.
Механизм 1 включает кривошип 5, закрепленный на валу привода 4, шатун 6, шарнирно связанный с кривошипом, и ползун 7, сопряженный с направляющей, при этом ползун шарнирно соединен с шатуном 6.
Исполнительный механизм 2 выполнен в виде рычажно-кулачкового механизма, содержащего ведущее звено, функцию которого выполняет ползун 7 передаточного механизма, два профильных клина 8 и 9, жестко закрепленных на стойках, и выходные звенья 10 и 11, шарнирно связанные с ползуном. На свободных концах выходных звеньев смонтированы ролики 12 и 13 для взаимодействия с клиньями 8 и 9. Шарнирная связь выходных звеньев с ползуном 7 содержит палец 14, жестко закрепленный на ползуне. Фиксированное положение выходных звеньев относительно ползуна 7 обеспечивается посредством пружин 15 и 16 сжатия и упора 17, закрепленного в концевой части ползуна. Упор 17 выполнен в виде призмы прямоугольного сечения, жестко закрепленной на ползуне, при этом продольная ось призмы параллельна линии хода ползуна.
Устройство типа “рука” для передачи изделий работает следующим образом.
При работе привода 4 кривошип 5 совершает вращательное движение, которое посредством шатуна 6 преобразуется в возвратно-поступательное движение ползуна 7. Вместе с ползуном поступательное движение совершают выходные звенья 10 и 11. В интервале прямого и обратного ходов выходные звенья занимают относительно ползуна фиксированное положение, находясь от линии его движения на одинаковом угловом удалении. Это обеспечивается посредством пружин 15 и 16 сжатия и взаимодействия звеньев с упором 17 на ползуне. Фиксированному положению звеньев 10 и 11 в интервалах движения ползуна соответствует сжатое положение губок 3 для захвата изделий.
В позициях “схват изделия” и “выдача изделия”, соответствующих границам интервалов движения ползуна, ролики 12 и 13 взаимодействуют с профильными клиньями 8 и 9, выходные звенья 10 и 11 совершают поворотные движения на пальце 14 и губки 3 разжимаются для приема или выдачи изделия. При выходе роликов из сопряжения с клиньями (движение ползуна от границы интервалов) выходные звенья под действием пружин возвращаются в начальное положение, при этом губки фиксируются в сжатом положении.
В интервале рабочего хода устройства губки 3 удерживают изделие, переносимое по прямолинейной траектории из одной позиции в другую. По завершении рабочего хода губки разжимаются и перестают удерживать изделие, при этом последнее выводится из устройства.
Предложенное устройство позволяет, в сравнении с прототипом, упростить конструкцию, повысить точность передачи изделий и производительность.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438858C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438856C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2232672C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224641C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265510C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265511C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217296C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2276009C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
Изобретение относится к средствам механизации операций передачи изделий из одной позиции в другую и может быть использовано преимущественно в различных технологических процессах для реализации вспомогательных операций. Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном в виде ползуна, исполнительного механизма с выходными звеньями, последние из которых снабжены губками для захвата изделий и подвижно соединены с выходным звеном передаточного механизма, и привода. Подвижное соединение выходных звеньев исполнительного и передаточного механизмов содержит пружины и упор для фиксированного положения выходных звеньев исполнительного механизма относительно ползуна в интервалах прямого и обратного ходов устройства. При этом упор жестко закреплен на концевой части ползуна, а фиксированному положению выходных звеньев соответствует сжатое положение губок. Изобретение позволит упростить конструкцию, повысить точность работы и производительность устройства. 1 ил.
Устройство типа “рука” для передачи изделий, содержащее комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном в виде ползуна, исполнительного механизма с выходными звеньями, последние из которых снабжены губками для захвата изделий и подвижно соединены с выходным звеном передаточного механизма, и привода, отличающееся тем, что подвижное соединение выходных звеньев исполнительного и передаточного механизмов содержит пружины и упор для фиксированного положения выходных звеньев исполнительного механизма относительно ползуна в интервалах прямого и обратного ходов устройства, при этом упор жестко закреплен на концевой части ползуна, а фиксированному положению выходных звеньев соответствует сжатое положение губок.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191107C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| US 5885052 A, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

