Изобретение относится к оборонной технике, в частности к комплексным средствам контроля параметров управляемых ракет, например, телеориентируемых в луче.
В настоящее время из-за высокого быстродействия и высокой степени доверия к полученным результатам контроля автоматизированные системы контроля заменяют обычную контрольно проверочную аппаратуру ручного контроля.
Известен способ контроля параметров управляемой ракеты, вращающейся по углу крена, и автоматизированная система контроля для его осуществления, описанные в патенте РФ №2243494 от 19.03.03 г., МПК7 F42B 15/00, выбранные в качестве прототипа. Способ контроля параметров управляемой ракеты, вращающейся по углу крена, включающий задачу формирования сигналов, имитирующих команды и вращение ракеты по углу крена, подачу их на аппаратуру управления ракеты, сравнение текущих величин команд управления на входе рулевого привода с предварительно заданными имитирующими значениями с учетом угла крена ракеты и оценку по результатам сравнения соответствия контролируемых параметров заданным, при котором имитирующий сигнал вращения ракеты по углу крена формируют в виде двух импульсных сигналов, сдвинутых относительно друг друга на 90°.
Известная автоматизированная система контроля параметров управляемой ракеты, вращающейся по углу крена и состоящей из последовательно включенных приемника, аппаратуры разделения каналов и декодирования, преобразователя команд с датчиком угла крена и рулевым приводом, содержащая источник питания, согласующее устройство и последовательно соединенные имитатор командного сигнала и блок контроля, второй вход которого соединен со входом рулевого привода, второй выход имитатора командного сигнала связан со входом приемника, элементы датчика угла крена соединены с выходом согласующего устройства, при этом имитатор сигнала вращения выполнен в виде формирователя кренового сигнала.
Недостатком известных способа контроля параметров управляемой ракеты, вращающейся по углу крена, и автоматизированной системы контроля для его осуществления является невысокая точность контроля из-за неопределенности момента его начала. Это обусловлено тем, что начальная фаза имитируемого сигнала вращения произвольная, а значит не соответствует начальному углу крена, с которым ракета установлена на пусковой установке.
Задачей настоящего изобретения является повышение точности контроля параметров управляемой ракеты, вращающейся по углу крена.
Поставленная задача решается за счет того, что в способе контроля параметров управляемой ракеты, вращающейся по углу крена, включающем задачу сигналов, имитирующих команды и вращение ракеты по углу крена, подачу их на аппаратуру управления ракеты, сравнение текущих величин команд управления на выходе аппаратуры управления с предварительно заданными имитирующими значениями с учетом угла крена ракеты и оценку по результатам сравнения соответствия контролируемых параметров заданным, при котором имитирующий сигнал вращения ракеты по углу крена формируют в виде двух импульсных сигналов, сдвинутых относительно друг друга на 90°, новым является то, что в требуемый момент начала процесса контроля вырабатывают сигнал, имитирующий начало управляемого полета ракеты, который синхронизируют первым фронтом одного из двух импульсных сигналов, соответствующего началу формирования команды по тангажу, при этом синхронизированным сигналом разрешают формирование импульсных сигналов на выходе имитатора сигнала вращения ракеты по углу крена с момента начала формирования команды по тангажу, причем с момента начала формирования сигнала или его синхронизации производят отсчет времени, в течение которого осуществляют контроль параметров управляемой ракеты.
Автоматизированная система контроля параметров управляемой ракеты, вращающейся по углу крена и состоящей из последовательно включенных аппаратуры управления и рулевого привода, содержащая источник питания, согласующее устройство и последовательно соединенные имитатор командного сигнала и блок контроля, второй вход которого соединен с выходом аппаратуры управления, второй выход имитатора командного сигнала связан с приемным входом аппаратуры управления, креновый вход которой соединен с выходом согласующего устройства, при этом имитатор сигнала вращения выполнен в виде формирователя кренового сигнала, в имитатор сигнала вращения введены два устройства разрешения и последовательно соединенные ключ и формирователь пускового сигнала, второй вход которого соединен с первым выходом формирователя кренового сигнала и первым входом первого устройства разрешения, первый вход второго устройства разрешения соединен со вторым выходом формирователя кренового сигнала, вторые входы обоих устройств разрешения соединены вместе и подключены к выходу формирователя пускового сигнала, источник питания соединен со вторым выводом ключа, выходы первого и второго устройств разрешения соединены соответственно с объединенными вместе входом согласующего устройства и третьим входом блока контроля.
Предлагаемое изобретение поясняется чертежами, приведенными на фиг.1, 2 и 3. На фиг.1 приведена структурная электрическая схема автоматизированной системы контроля параметров управляемой ракеты, вращающейся по углу крена, где 1 - ракета (Р); 2 - аппаратура управления (АУ); 3 - приемник (П); 4 - имитатор командных сигналов (ИКС); 5 - аппаратура разделения каналов и декодирования (АРКД); 6 - блок контроля (БК); 7 - преобразователь команд (ПК); 8 - согласующие устройства (СУ); 9 - рулевой привод (РП); 10 - имитатор сигнала вращения (ИСВ).
На фиг.2 приведена упрощенная структурная электрическая схема имитатора сигнала вращения 10, где 11 - формирователь кренового сигнала (ФКС); 12 - автогенератор (АГ); 13 - формирователь пускового сигнала (ФПС); 14а и 14б - первый и второй делители частоты соответственно (ДЧ1 и ДЧ2); 15 - D триггер (ДТ); 16 - формирователь разового импульса (ФРИ); 17а и 17б первое и второе устройства разрешения (УР1 и УР2); Е - источник питания; К - ключ.
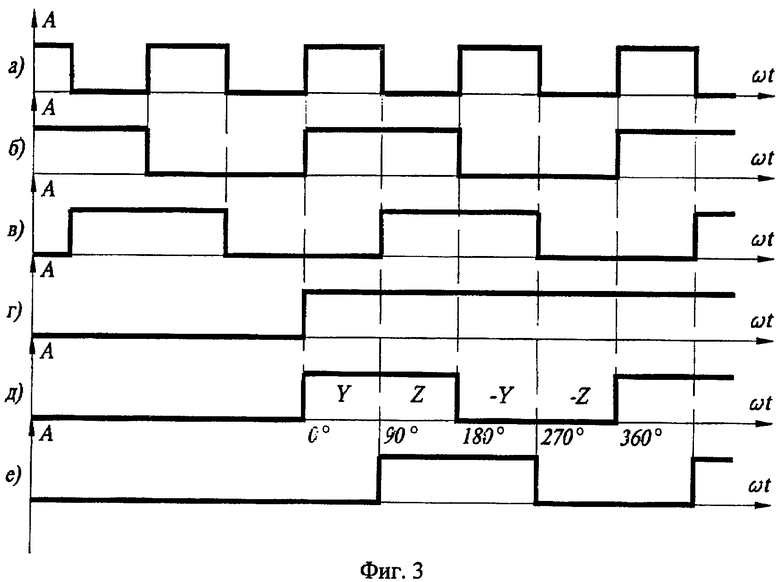
На фиг.3 приведены эпюры сигналов, где "а" - на выходе автогенератора 12; "б" и "в" - соответственно на первом и втором выходах формирователя кренового сигнала 11 (первый и второй разряды двоичного числа); "г" - на выходе формирователя пускового сигнала 13,"д" и "е" - соответственно на выходах первого и второго устройств разрешения 17а и 17б.
Заявленный способ реализуют следующим образом. Задают сигналы, имитирующие команды и вращение ракеты по углу крена. Например, сигналы, имитирующие команды, задают как в прототипе, т.е. формируют командные сообщения, изменяемые от максимального до минимального значений в каналах по курсу Z и тангажу Y, которые модулируют по закону временно-импульсной модуляции и преобразуют в электромагнитное излучение, например оптическое. В ряде случаев удобно подавать на ракету имитирующие команды не в виде электромагнитного излучения, а в виде сигнала с временно импульсной модуляцией, минуя приемник, например, на вход аппаратуры разделения каналов и декодирования.
Аналогичным образом (как в прототипе при N=2, где N - количество оптронных пар в датчик угла крена) формируют имитирующий сигнал вращения ракеты по углу, при этом сигнал вращения ракеты по углу крена формируют в виде двух импульсных сигналов, сдвинутых относительно друг друг на 90°. Подают сигналы, имитирующие команды и вращение ракеты по углу крена на входы бортовой аппаратуры управления, соответственно, например, на оптический вход приемника и на входные элементы датчика угла крена ракеты в преобразователе команд через согласующее устройство.
Поскольку значения имитирующих команд заранее известны, т.е. они известны для каждого текущего момента (отрезка) времени, то заданные (например, программно изменяемые во времени) командные сообщения и реально измеренные декодированные команды управления на рулевом приводе можно сравнивать по величине, а значит выделять разницу этих двух текущих во времени величин, а по ней делать вывод о соответствии контролируемых параметров заданным значениям.
В требуемый момент начала процесса контроля вырабатывают сигнал, имитирующий начало управляемого полета ракеты, например, скачок напряжения. Этот скачок напряжения (например, перепад логического уровня из нулевого в единичное) синхронизируется первым фронтом одного из двух импульсных сигналов, соответствующего началу формирования команды по тангажу, соответствующего величине имитирующего угла крена ракеты, например, равного 0°.
Синхронизированный скачок напряжения разрешает формировать импульсные сигналы на выходе имитатора сигнала вращения ракеты по углу крена. Причем эти импульсные сигналы начинаются с момента начала формирования команды по тангажу.
Кроме того, с момента начала формирования сигнала или его синхронизации (например, с момента начала формирования скачка напряжения или с момента его синхронизации) производят отсчет времени, в течение которого осуществляют контроль параметров управляемой ракеты.
Для реализации заявленного способа предлагается автоматизированная система контроля параметров управляемой ракеты, вращающейся по углу крена, в которой последовательно соединены имитатор командного сигнала 4 и блок контроля 6. Второй выход имитатора командного сигнала 4 связан с приемным входом аппаратуры управления 2 (входом приемника 3 или аппаратуры разделения каналов и декодирования 5). Второй вход блока контроля 6 соединен с выходом аппаратуры управления 2. Выход согласующего устройства 8 соединен с креновым входом аппаратуры управления 2. Последовательно соединены ключ К и формирователь пускового сигнала 13, второй вход которого соединен с первым выходом формирователя кренового сигнала 11 и первым входом первого устройства разрешения 17а. Первый вход второго устройства разрешения 17б соединен со вторым выходом формирователя кренового сигнала 11. Вторые входы обоих устройств разрешения 17а и 17б соединены вместе и подключены к выходу формирователя пускового сигнала 13. Источник питания Е соединен со вторым выводом ключа К. Выходы первого 17а и второго 17б устройств разрешения соединены с цифровыми (двухразрядными) входами: входом согласующего устройства 8 и третьим входом блока контроля 6.
Имитатор командного сигнала 4, блок контроля 6 и согласующее устройство 8 можно выполнить как в прототипе, при этом согласующее устройство 8 может быть выполнено в виде двух идентичных устройств. Ракета 1 выполнена аналогично как в прототипе, при этом в аппаратуру управления 2 включены последовательно соединенные приемник 3, аппаратура разделения каналов и декодирования 5 и преобразователь команд 7, в который включен оптронный датчик угла крена.
Пример выполнения имитатора сигнала вращения 10 приведен на фиг.2. Автогенератор 12, например, перестраиваемый по частоте генератор импульсов со скважностью два. Делители частоты 14а и 14б делят частоту импульсного входного сигнала на два, при этом первый срабатывает, например, по переднему фронту входных импульсов, а второй по заднему фронту. В качестве первого и второго делителей частоты 14 можно использовать первый (младший) разряд счетчиков импульсов на микросхеме 564ИЕ10, при подаче сигнала соответственно на входы "С" и "V".
"D" триггер 15 можно выполнить на микросхеме 564ТМ2, при этом "D" вход - это первый вход формирователя пускового сигнала 13, "R" вход - вход обнуления, "С" вход - второй вход формирователя пускового сигнала 13, при наличии на котором перепада логических уровней из нулевого в единичный запоминается величина логического уровня с "D" входа.
Формирователь разового импульса 16 может быть выполнен в виде дифференцирующей RC цепи, состоящей из последовательно включенных конденсатора и резистора, причем первый вывод конденсатора подключен к источнику питание Е, первый вывод резистора заземлен, а вторые выводы конденсатора и резистора соединены между собой и являются выходом дифференцирующей RC цепи, на котором, в момент выхода источника питания на режим, формируется разовый импульс (скачок напряжения). Первое и второе устройства разрешения 17а и 17б идентичные и могут быть выполнены каждая как логическая двухвходовая схема "И". Источник Е - источник, величина которого соответствует единичному логическому уровню. К - ключ, например, кнопка с фиксацией, при нажатии которой замыкается цепь.
Заявленная автоматизированная система контроля параметров управляемой ракеты, вращающейся по углу крена, работает следующим образом. В исходном состоянии включают источник питания и подают напряжение на автоматизированную систему контроля параметров управляемой ракеты, в том числе и на ракету 1. При этом при выходе на рабочий режим источника питания формирователь разового импульса 16 формирует импульс. Этот разовый импульс поступает на "R" вход "D" триггер 15 и устанавливает на выходе формирователя пускового сигнала 13 нулевой логический уровень (эпюра "г" на фиг.3). Автогенератор 12 вырабатывает импульсы, приведенные на эпюре "а" фиг.3, которые поступают на входы первого 14а и второго 14б делителей частоты. С выходов делителей частоты 14а и 14б (эпюры "б" и "в" на фиг.3) сигналы поступают соответственно на первые входы первого 17а и второй 17б устройств разрешения.
Поскольку на вторые входы первого 17а и второго 17б устройств разрешения поступает логический нуль с выхода формирователя пускового сигнала 13, то он запрещает прохождение сигналов их первых входов и на выходах обоих устройств разрешения будет логический нуль (эпюры "д" и "е" на фиг.3). С момента нажатия кнопки "К" на первом входе формирователя пускового сигнала 13 будет единичный логический уровень от источника "Е", который при наличии на его втором входе фронт сигнала с выхода первого делителя частоты 14а, в данном случае перепад из нуля в единичный логический уровень (эпюра "б" на фиг.3), сформирует на его выходе сигнал с единичным логическим уровнем (эпюра "г" на фиг.3).
Этот единичный логический уровень с выхода формирователя пускового сигнала 13 поступает на вторые входы первого 17а и второго 17б устройств разрешения и разрешает прохождение на их выходы сигналов с выходов соответственно первого 14а и второго 14б делителей частоты (эпюры "д" и "е" на фиг.3). Сигналы, приведенные на этих двух эпюрах, можно рассматривать как сигналы первого и второго разрядов двоичного двухразрядного числа, например число 10 соответствует углу крена ракеты 0°-90° и формированию на ракете команды по тангажу Y, число 11 соответствует 90°-180° и формированию на ракете команды по курсу Z, число 01 соответствует 180°-270° и формированию на ракете команды по тангажу минус Y и число 00 соответствует 270°-360° и формированию на ракете команды по курсу минус Z.
Таким образом, на ракете в течение первой четверти кренового периода будет формироваться первая команда в канале тангажа со своим знаком (не инвертированная). Появление первой четверти кренового периода, а именно его фронта из нуля в единичное состояние, используются, например, на ракете для запуска таймера для программного изменения команд управления по времени на ракете [патент РФ №2242698 от 26.11.02 г., МПК7 F42B 15/00]. Аналогично данный сигнал используется в блоке контроля 6 для соответствующего программного изменения команд управления по времени, с которыми сравниваются команды управления, поступающие на его второй вход.
Следовательно, синхронизация в имитаторе сигнала вращения 10 начала формирования команд (сигнала первой четверти вращения ракеты по углу крена) с началом отсчета времени позволила начинать контроль параметров с одной и той же величины угла крена ракеты, равного 0°.
Предлагаемая группа изобретений - способ контроля параметров управляемой ракеты, вращающейся по углу крена, и автоматизированная система контроля параметров для его осуществления - повышает точность контроля за счет исключения неопределенности момента его начала.

Изобретения относятся к средствам контроля параметров управляемых ракет. Способ контроля параметров управляемой ракеты, вращающейся по углу крена, включает задачу сигналов, имитирующих команды и вращение ракеты по углу крена, подачу их на аппаратуру управления ракеты, сравнение текущих величин команд управления на выходе аппаратуры управления с предварительно заданными имитирующими значениями и оценку по результатам сравнения соответствия контролируемых параметров заданным, при которой имитирующий сигнал вращения ракеты по углу крена формируют в виде двух импульсных сигналов. Импульсные сигналы сдвинуты относительно друг друга на 90°. В требуемый момент начала процесса контроля вырабатывают сигнал, имитирующий начало управляемого полета ракеты, который синхронизируют первым фронтом одного из двух импульсных сигналов, соответствующего началу формирования команды по тангажу. Синхронизированным сигналам разрешают формирование импульсных сигналов на выходе имитатора сигнала вращения ракеты по углу крена с момента начала формирования команды по тангажу, причем с момента начала формирования сигнала или его синхронизации производят отсчет времени, в течение которого осуществляют контроль параметров управляемой ракеты. Также описана система для реализации способа. Повышается точность контроля параметров ракеты. 2 н.п. ф-лы, 3 ил.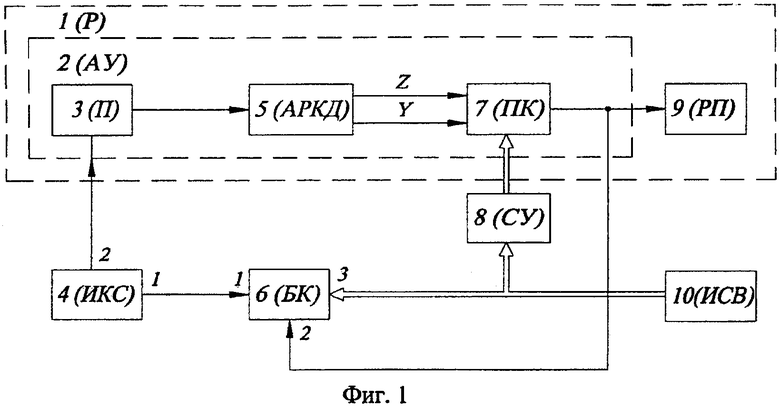
1. Способ контроля параметров управляемой ракеты, вращающейся по углу крена, включающий задачу сигналов, имитирующих команды и вращение ракеты по углу крена, подачу их на аппаратуру управления ракеты, сравнение текущих величин команд управления на выходе аппаратуры управления с предварительно заданными имитирующими значениями с учетом угла крена ракеты и оценку по результатам сравнения соответствия контролируемых параметров заданным, при котором имитирующий сигнал вращения ракеты по углу крена формируют в виде двух импульсных сигналов, сдвинутых относительно друг друга на 90°, отличающийся тем, что в требуемый момент начала процесса контроля вырабатывают сигнал, имитирующий начало управляемого полета ракеты, который синхронизируют первым фронтом одного из двух импульсных сигналов, соответствующего началу формирования команды по тангажу, при этом синхронизированным сигналам разрешают формирование импульсных сигналов на выходе имитатора сигнала вращения ракеты по углу крена с момента начала формирования команды по тангажу, причем с момента начала формирования сигнала или его синхронизации производят отсчет времени, в течение которого осуществляют контроль параметров управляемой ракеты.
2. Автоматизированная система контроля параметров управляемой ракеты, вращающейся по углу крена и состоящей из последовательно включенных аппаратуры управления и рулевого привода, содержащая источник питания, согласующее устройство и последовательно соединенные имитатор командного сигнала и блок контроля, второй вход которого соединен с выходом аппаратуры управления, второй выход имитатора командного сигнала связан с приемным входом аппаратуры управления, креновый вход которой соединен с выходом согласующего устройства, при этом имитатор сигнала вращения выполнен в виде формирователя кренового сигнала, отличающаяся тем, что имитатор сигнала вращения снабжен двумя устройствами разрешения и последовательно соединенными ключом и формирователем пускового сигнала, второй вход которого соединен с первым выходом формирователя кренового сигнала и первым входом первого устройства разрешения, первый вход второго устройства разрешения соединен со вторым выходом формирователя кренового сигнала, вторые входы обоих устройств разрешения соединены вместе и подключены к выходу формирователя пускового сигнала, источник питания соединен со вторым выводом ключа, выходы первого и второго устройств разрешения соединены соответственно с объединенными вместе входом согласующего устройства и третьим входом блока контроля.
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ УПРАВЛЯЕМОЙ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО КРЕНУ, И АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2243494C2 |
| WO 9749020 A2, 24.12.1997 | |||
| Система управления фрикционными гидромуфтами двухпоточной коробки передач транспортного средства | 1988 |
|
SU1532344A1 |
| СПОСОБ ГИБРИДНОЙ ЛАЗЕРНО-ДУГОВОЙ СВАРКИ ДЕТАЛЕЙ ИЗ АЛИТИРОВАННОЙ СТАЛИ С ПРОВОЛОКОЙ, СОДЕРЖАЩЕЙ ОБРАЗУЮЩИЕ ГАММУ-ФАЗУ ЭЛЕМЕНТЫ, И ГАЗОМ, СОДЕРЖАЩИМ МЕНЕЕ 10% АЗОТА ИЛИ КИСЛОРОДА | 2011 |
|
RU2588978C2 |

