Изобретение относится к контрольно-измерительной технике и может быть использовано дорожно-патрульной службой для определения кинематических характеристик движения автомобилей, движущихся по многополосной магистрали в условиях плохой видимости (ночное время, туман и т.п.).
Известен доплеровский акустический способ аналогичного назначения, заключающийся в облучении автомобиля ультразвуковым излучателем и приеме отраженного от автомобиля ультразвука, по доплеровской частоте которого определяют скорость движения автомобиля /Патент Японии №48-31866, кл. 111А5 (G 01 P 3/76), 1973/.
Недостатком известного способа являются трудности наведения доплеровского сонара на движущийся автомобиль в условиях плохой видимости. А также невозможность одновременного контроля кинематических характеристик множества автомобилей одновременно.
Известен акустический способ определения скорости движения автомобиля, заключающийся в приеме электроакустическим преобразователем тональной составляющей звука, производимой автомобилем, по частоте которой определяют скорость движения автомобиля /Патент Великобритании №1188204, кл. Н 4 D (G 01 P 3/00), 1967; Патент США №3529242, кл. 324-166 (G 01 P 3/54), 1970/.
Последний аналог принят за прототип. В прототипе перед электроакустическим преобразователем устанавливают решетку стержней, генерирующих звук от проезжающего мимо нее автомобиля. С помощью фильтра выделяют тональную составляющую принятого звука, имеющую максимальную амплитуду, и по ней определяют скорость движения автомобиля.
Недостатком прототипа является невозможность дистанционного измерения скорости движения автомобиля, контроль скорости и других кинематических характеристик движения сразу множества автомобилей.
Техническим результатом, появляющимся от внедрения изобретения, является возможность дистанционного определения скоростей движения сразу множества автомобилей, а также контроль номера дорожной полосы, по которой движется каждый автомобиль, и времени прохода пункта дорожно-патрульной службы каждым автомобилем в условиях плохой видимости.
Поставленный технический результат достигается тем, что в известном акустическом способе определения скорости движения в условиях плохой видимости, заключающийся в приеме электроакустическим преобразователем тональной составляющей звука, производимой автомобилем, по частоте которой определяют скорость движения автомобиля, тональную составляющую звука f0, Гц, выделяют из спектра шумоизлучения автомобиля, при этом непрерывно измеряют изменение доплеровской частоты f(t), Гц, во времени t, с данной тональной составляющей f0 и на временах, на которых наблюдается постоянство доплеровской частоты f(t) во времени t, определяют значение скорости V,  движения автомобиля по математической зависимости:
движения автомобиля по математической зависимости:

где С, м/с - скорость звука или скорость звука, определяемая экспериментально непосредственно в период определения скорости автомобиля, причем в момент времени t0, когда f(t)=0, определяют траверзное расстояние d0 между автомобилем и электроакустическим преобразователем, исходя из математической зависимости:

где t0, с - время прохождения автомобилем траверзного расстояния d0, м, между автомобилем и электроакустическим преобразователем.
Существо способа заключается в том, что при прямолинейном равномерном движении тонального источника звука связь доплеровской частоты с параметрами C, V, d0, t0 задается уравнением (2). То есть зависимость наблюдаемой частоты от времени является функцией, содержащей четыре параметра. Если значение функции f(t) каким-либо образом оценены для ряда временных отсчетов ti, то оценки параметров траектории движения автомобиля могут быть получены на основе решения задачи нелинейной регрессии методом наименьших квадратов /Д.Дж.Уайлд "Методы поиска экстремума", М.: Наука, 1967, с.17-27/.
Модель регрессии задается уравнением (2). Функционал метода наименьших квадратов имеет вид:

где Wi - весовая функция;  - измеренные значения частот /Ф.Гилл и др. Практическая оптимизация. М.: Мир, 1985, с.104-110/. Таким образом, определив скорость V автомобиля по уравнению (1) и зная значения f(t), f0, C, t0, можно по уравнению (2) определить значение d0 и номер дорожной полосы, по которой движется автомобиль.
- измеренные значения частот /Ф.Гилл и др. Практическая оптимизация. М.: Мир, 1985, с.104-110/. Таким образом, определив скорость V автомобиля по уравнению (1) и зная значения f(t), f0, C, t0, можно по уравнению (2) определить значение d0 и номер дорожной полосы, по которой движется автомобиль.
Изобретение поясняется чертежами: на фиг.1 представлена схема реализации способа; а на фиг.2 - частотно-временные следы (ЧВС), получаемые от движущихся автомобилей, для пояснения существа способа.
Способ реализуется следующим образом.
Электрический преобразователь 1 с характеристикой направленности, ориентированной на шестирядную магистраль 2, устанавливают рядом с пунктом 3 дорожно-патрульной службы (ДПС).
На преобразователь 1 (микрофон) поступает шум автомобилей 4, имеющий однотипный характер по спектру. С помощью перестраиваемого узкополосного фильтра из шумов всех автомобилей выделяют тональную составляющую f0 и прослеживают величину доплеровской частоты f(t) этой частоты.
Когда автомобиль находится достаточно далеко от ДПС, значение доплеровской частоты равно  с точностью до погрешности эксперимента. Поэтому скорость автомобиля определяется задолго до его подъезда к ДПС.
с точностью до погрешности эксперимента. Поэтому скорость автомобиля определяется задолго до его подъезда к ДПС.
Когда автомобиль проезжает ДПС, доплеровская частота f(t)=f0.
Данный момент t0 фиксируется. Если ранее на временах t≪t0 было определено, что скорость автомобиля V превышала допустимую, то включается громкоговоритель и осветитель для остановки нарушителя. При этом номер дорожной полосы определяется микропроцессором по формуле (2).
На мониторе микропроцессора каждый движущийся автомобиль оставляет ЧВС (фиг.2). Причем автомобиль, движущийся с предельно допустимой скоростью, оставляет на мониторе желтый след 5.
Автомобили-нарушители оставляют красный след 6, а автомобили, двигающиеся со скоростью меньше предельно допустимой, - зеленый цвет - 7.
Нижние части ЧВС на фиг.2 оставляют приближающиеся к ДПС автомобили, а верхние - удаляющиеся от нее.
В условиях плохой видимости представитель ДПС не преследует удаляющийся автомобиль-нарушитель, а звонит на следующий участок ДПС, также оснащенный подобной аппаратурой для задержания нарушителя.
Остановка автомобиля приводит к исчезновению доплеровской частоты, что фиксируется на мониторе микропроцессора с указанием координат нарушителя. В последнем случае полоса перекрывается для движения во избежание столкновений автомобилей.
На точность определения скорости автомобиля данным способом будет влиять изменение величины скорости звука от климатических условий (в основном от температуры). Так, для средних широт в зависимости от времени года величина скорости звука изменяется в пределах 10%.
Если подобная величина погрешности определения скорости автомобиля будет не устраивать ДПС, следует измерять скорость звука непосредственно в период проведения экспериментов или пользоваться поправочными таблицами.
Таким образом, описанный способ в условиях плохой видимости позволяет наблюдать кинематические характеристики множества автомобилей, что повышает безопасность движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ДОРОЖНО-ПАТРУЛЬНОЙ СЛУЖБОЙ ДВИЖЕНИЯ НА ОПАСНОМ УЧАСТКЕ СКОРОСТНОЙ МАГИСТРАЛИ | 2005 |
|
RU2287859C1 |
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ "ВЗГЛЯД-1" | 2008 |
|
RU2377572C2 |
| ШУМОПЕЛЕНГАТОР | 2004 |
|
RU2284543C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2557666C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ШУМОПЕЛЕНГАТОР | 2004 |
|
RU2297012C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2557667C2 |
| СПОСОБ ОБНАРУЖЕНИЯ, ИДЕНТИФИКАЦИИ И ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2422909C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2395815C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ХОДОМ СОРЕВНОВАНИЙ ПОДВОДНЫХ ПЛОВЦОВ (ВАРИАНТЫ) | 2004 |
|
RU2284547C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ДАВЛЕНИЯ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 2004 |
|
RU2284484C2 |

Изобретение относится к контрольно-измерительной технике и может быть использовано дорожно-патрульной службой (ДПС). Техническим результатом изобретения является обеспечение возможности определения и контроля кинематических характеристик автомобилей на многополосной трассе в условиях плохой видимости. Акустический способ определения скорости движения автомобиля в условиях плохой видимости заключается в том, что из спектра шумоизлучения автомобилей выделяют тональную составляющую и измеряют изменения доплеровской частоты во времени данной тональной составляющей. По измеренным значениям доплеровской частоты определяют скорость автомобиля, а также время прохода автомобилем станции ДПС и номер дорожной полосы. 2 ил.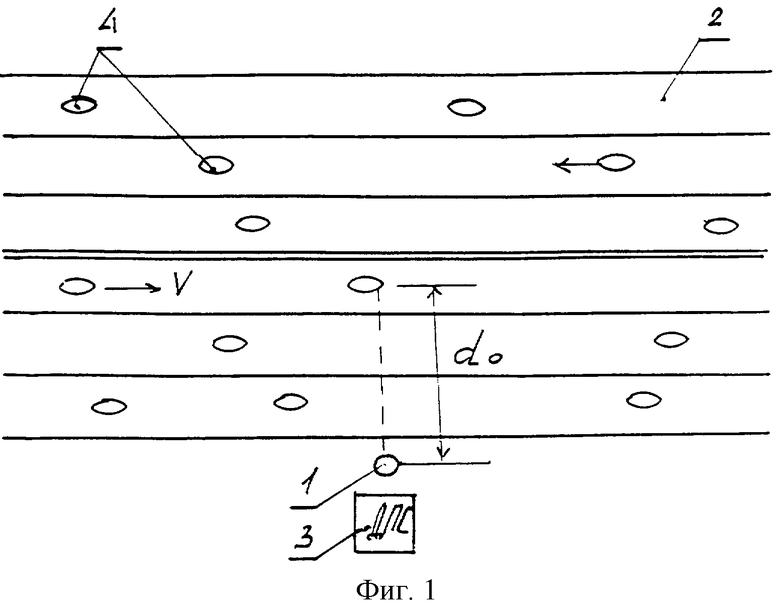
 движения автомобиля по математической зависимости
движения автомобиля по математической зависимости

где С, м/с, - известная скорость звука или скорость звука, определенная экспериментально, непосредственно в период определения скорости автомобиля, причем в момент времени t0, когда f(t)=f0, определяют траверзное расстояние d0 между автомобилем и электроакустическим преобразователем, исходя из математической зависимости

где t0, с, - время прохождения автомобилем траверзного расстояния d0, м, между автомобилем и электроакустическим преобразователем.
| ИНДИКАТОР КОНТРОЛЯ СТЕПЕНИ СУХОСТИ НАСЫЩЕННОГО ВОДЯНОГО ПАРА | 2007 |
|
RU2376585C2 |
| JP 2000019192 А, 12.10.1999 | |||
| Способ формования туалетного мыла | 1984 |
|
SU1188204A1 |
| JP 5119151 А, 18.05.1993 | |||
| Устройство для измерения скорости течения | 1982 |
|
SU1136081A1 |

