Изобретение относится к контрольно-измерительной технике и может быть использовано дорожно-патрульной службой (ДПС) для дистанционного контроля движения автотранспорта на опасном участке скоростной магистрали в условиях плохой видимости (например, во время тумана и в ночное время суток).
Известен способ аналогичного назначения, согласно которому скоростную магистраль ортогонально направлению движения пересекают ультразвуковые импульсы. По частоте отраженных от автомобиля импульсов, принимаемых электроакустическим преобразователем, судят о скорости движения транспорта /Патент Японии №43-3597, кл. 111А51 (G 08 G), 1968/.
Недостатком известного способа является невозможность с его помощью контролировать весь опасный участок скоростной магистрали (ОУСМ).
Известен способ аналогичного назначения, заключающийся в облучении движущегося автомобиля ультразвуковым излучением и приеме электроакустическим преобразователем (ЭАП) отраженного от движущегося автомобиля доплеровского излучения, по частоте которого определяют скорость движения /Патент Японии №48-31866, кл. 111А5 (G 01 P 3/76), 1973/.
Недостатком данного аналога является невозможность его применения в условиях плохой видимости.
Известен способ контроля ДПС движения на опасном участке скоростной магистрали, заключающийся в том, что в начале опасного участка магистрали располагают ЭАП и с его помощью принимают тональный звуковой сигнал, производимый движущимся автомобилем, и по этому сигналу определяют скорость движения автомобиля /Патент Великобритании №1111204, кл. H 4 D (G 01 P 3/00), 1987; Патент США №3529242, кл. 324-166 (G 01 P 3/54), 1970/.
Последний способ принят за прототип.
В прототипе перед началом ОУСМ устанавливают решетку стержней, перекрывающих ЭАП. При этом на последнем возникает тональный звуковой сигнал, частота которого несет информацию о скорости движения автомобиля.
Недостатком прототипа является невозможность с его помощью контролировать скорость движения сразу всех автомобилей на ОУСМ.
Техническим результатом, появляющимся от внедрения изобретения, является контроль ДПС движения всех автомобилей, находящихся на ОУСМ (их скоростей и координат).
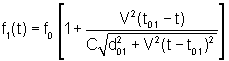
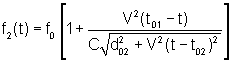
Данный технический результат достигают за счет того, что в известном способе контроля ДПС движения на ОУСМ, заключающемся в том, что в начале ОУСМ располагают ЭАП и с его помощью принимают тональный звуковой сигнал, производимый движущимся автомобилем, а по сигналу определяют скорость движения автомобиля, в конце ОУСМ располагают второй ЭАП для приема тонального звукового сигнала частотой f0, Гц, который выделяют из спектра шумоизлучения каждого движущегося автомобиля, при этом непрерывно измеряют изменения доплеровских частот f1(t),Гц и f2(t), Гц во времени t, c, соответственно первым и вторым ЭАП за все время прохождения каждым автомобилем ОУСМ, затем дальним по отношению к контролируемому автомобилю ЭАП, когда f1(t) или f2(t) постоянны, определяют скорость движения V, м/с автомобиля по формуле

где f(t), Гц - постоянные значения доплеровских частот f1(t), f2(t), С, м/с - постоянная скорость звука или скорость звука, измеренная в период контроля, и фиксируют моменты времени t01, c, t02, c, в которые f1(t)=f2(t)=f0, а автомобиль находится на траверзных расстояниях d01, м и d02, м от соответствующего ЭАП, определяемых из математических зависимостей


и по известным значениям f1(t), f2(t), t01, t02, d01, d02, V и С контролируют пространственные координаты и кинематические параметры движущегося автомобиля на ОУСМ.
Кроме того, дополнительно определяют распределение во времени мгновенной разностной доплеровской частоты f12(t}=f1(t)-f2{t) и в момент времени, когда f12(t)=0 фиксируют время t12, с прохождением каждым автомобилем середины ОУСМ, при этом траекторию движения автомобиля на опасном участке определяют исходя из математической зависимости

Причем определение распределения мгновенной разностной доплеровской частоты во времени проводят путем объединения первого и второго ЭАП в интерферометр.
Существо способа заключается в том, что при условии равномерного и прямолинейного движения тонального звукового источника относительно неподвижных ЭАП наблюдаются доплеровские частоты f1(t) и f2(t), описываемые соотношениями (2), (3).
Если ЭАП объединены в интерферометр, то мгновенная разностная доплеровская частота f12(t) на выходе интерферометра будет описываться уравнением (4).
Зависимости наблюдаемых доплеровских частот f1(t), f2(t) и их разности f12(t) содержат четыре параметра, которые можно определить экспериментально. При этом если значения функций f1(t), f2(t), f12(t) каким-либо образом оценены для ряда временных интервалов fi, то оценки параметров траекторий движения тональных источников могут быть получены на основе решения задачи нелинейной регрессии методом наименьших квадратов /Д. Дж. Уайлд "Методы поиска экстремума". М., "Наука", 1967, с.17-27/. Модель регрессии задается уравнениями (2), (3), (4).
Функционал метода наименьших квадратов имеет вид

где Wi - весовая функция;  (ti) - измеренные значения частот /Ф.Гилл и др. "Практическая оптимизация". М., "Мир", 1985, с.104-110/.
(ti) - измеренные значения частот /Ф.Гилл и др. "Практическая оптимизация". М., "Мир", 1985, с.104-110/.
Из уравнений (2), (3) следует, что, если t01, «t«t01 и t02«t«t02, частоты f1(t), f2(t) постоянны с точностью до погрешностей эксперимента. Это дает возможность по формуле (1) определить скорость автомобиля. При этом расстояние между первым и вторым ЭАП выбирается таким, чтобы, когда автомобиль находился у первого ЭАП, реализовывалось указанное выше условие для второго ЭАП для заданных на ОУСМ скоростей движения.
Из этих же уравнений (2), (3) следует, что при f1(t) и f2(t), равных f0, автомобиль находится на траверзных расстояниях d01 и d02 от ЭАП. Это наступает на временах t01 и t02.
Фиксируя данные траверзные времена по уравнениям (2) и (3), находим d01 и d02, по которым определяют номер дорожной полосы движения автомобиля.
Когда автомобиль находится непосредственно на ОУСМ, измеряют с помощью интерферометра мгновенную разностную доплеровскую частоту f12(t), связанную с кинематическими параметрами движения автомобиля уравнением (4).
Величина f12(t) более сильно изменяется во времени по сравнению с f12(t), f2(t) и в определенных пределах не зависит от нестабильности тональной составляющей f0. Это позволяет более точно определять координаты автомобиля внутри ОУСМ.
Изобретение поясняется чертежом, на фиг.1 которого представлена схема реализации способа, на фиг.2 представлены частотно-временные следы (ЧВС), оставляемые автомобилем, при регистрации его движения двумя ЭАП раздельно и при объединении их в интерферометр.
У обочины шестиполосной скоростной магистрали в условиях плохой видимости (например, туман или плохое освещение) устанавливают два ЭАП 1 и 2.
Пульт 3 ДПС устанавливают, например, в середине ОУСМ. Пульт 3 включает в себя микропроцессор с дисплеем и переключатель совместного и раздельного режимов работы ЭАП 1 и 2 (на чертеже не показаны).
Автомобили 4, имеющие примерно одинаковый спектр шумоизлучения, ближние к ЭАП 1 и 2, двигаются слева направо, а дальние - справа налево.
С помощью перестраиваемых узкополосных фильтров, установленных на выходах ЭАП, (фильтры на чертеже не показаны) из спектров шумов всех автомобилей выделяют тональный звуковой сигнал частотой f0 и с помощью двух ЭАП прослеживают за величинами f1(t), f2(t) и f12(t).
При этом после соответствующей алгоритмам (1), (2), (3), (4) обработки сигналов на микропроцессоре на дисплее появляется серия ЧВС (фиг.2), соответствующих каждому движущемуся автомобилю.
Хотя тональная звуковая составляющая f0 для всех автомобилей может быть одна и та же, из-за их различных скоростей и пространственных координат на дисплее ЧВС различных автомобилей не сольются, а будут группироваться вокруг кривых 5, 6, 7 (фиг.2), соответствующих рекомендуемой или предельно допустимой скорости автомобиля на ОУСМ. Данные кривые на дисплее задают для удобства желтым цветом. Автомобили, двигающиеся с меньшими скоростями, будут высвечиваться рядом с ЧВС 5, 6, 7 зеленым цветом, а с большими - красным.
Последние объекты представляют особую опасность для движения по ОУСМ. ДПС принимает меры по удалению последних с магистрали.
Низкоскоростные автомобили также могут представлять опасность для движения в условиях плохой видимости и также могут быть удалены с магистрали.
На точность определения кинематических параметров автомобилей будет влиять изменение скорости звука от температуры и атмосферного давления. Для средних широт изменение скорости звука в различные времена года и времена суток не превышает 10%. Такая погрешность измерений в большинстве случаев устраивает ДПС. В противном случае необходимо определить скорость звука С непосредственно при проведении эксперимента или вносить в результаты измерений табличные поправки на скорость звука.
Таким образом, данный способ позволяет оперативно следить за дорожным движением сразу всех автомобилей на ОУСМ, чем достигается поставленный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ АВТОМОБИЛЯ В УСЛОВИЯХ ПЛОХОЙ ВИДИМОСТИ | 2005 |
|
RU2290660C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ШУМОПЕЛЕНГАТОР | 2004 |
|
RU2297012C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2557666C2 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ХОДОМ СОРЕВНОВАНИЙ ПОДВОДНЫХ ПЛОВЦОВ (ВАРИАНТЫ) | 2004 |
|
RU2284547C2 |
| ШУМОПЕЛЕНГАТОР | 2004 |
|
RU2284543C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2557667C2 |
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ "ВЗГЛЯД-1" | 2008 |
|
RU2377572C2 |
| Способ профилирования структуры донных осадков | 2023 |
|
RU2835813C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2395815C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ДАВЛЕНИЯ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 2004 |
|
RU2284484C2 |

Изобретение относится к контрольно-измерительной технике и может быть использовано дорожно-патрульной службой (ДПС) для дистанционного контроля движения автотранспорта на опасном участке скоростной магистрали (ОУСМ) в условиях плохой видимости. Технический результат заключается в обеспечении контроля движения всех автомобилей, находящихся на ОУСМ. Способ заключается в том, что с помощью двух электроакустических преобразователей (ЭАП), установленных на концах ОУСМ, воспринимают шумоизлучение всех двигающихся на этом участке магистрали автомобилей. Затем выделяют из спектра шумоизлучения автомобилей тональную звуковую составляющую на частоте f0, Гц и прослеживают на этой частоте за изменениями доплеровских частот, воспринимаемых различными ЭАП, а также мгновенной разностной доплеровской частоты, воспринимаемой сразу двумя ЭАП. Дальнейший анализ принятых и обработанных на микропроцессоре сигналов позволяет определить траектории движения и скорости всех автомобилей, двигающихся на ОУСМ, и принять соответствующие меры к нарушителям дорожного движения. 2 з.п. ф-лы, 2 ил.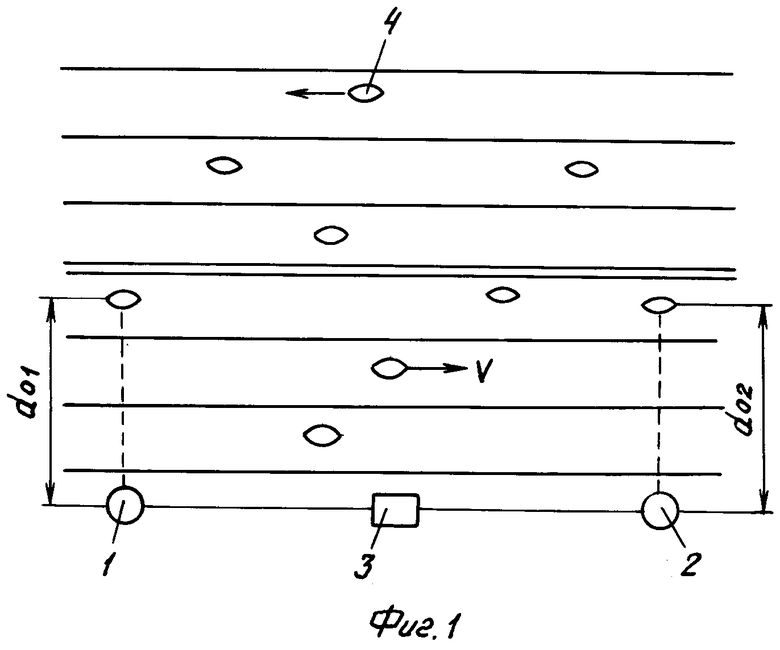

где f(t) - постоянные значения доплеровских частот f1(t), f2(t), Гц;
С - постоянная скорость звука или скорость звука, измеренная непосредственно в период контроля, м/с,
и фиксируют моменты времени t01, с, и t02, с, в которые f1(t)=f2(t)=f0, а автомобиль находится на траверзных расстояниях d01, м, и d02, м, от соответствующего электроакустического преобразователя, определяемых из математических зависимостей:
и по известным значениям f1(t), f2(t), t01, t02, d01, d02, V и С контролируют пространственные координаты и кинематические параметры движущегося автомобиля на опасном участке скоростной магистрали.

| US 3529242 А, 15.09.1970 | |||
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ НАРУШЕНИЙ ДОРОЖНОГО ДВИЖЕНИЯ С ДИНАМИЧЕСКИМИ СИСТЕМАМИ НАВЕДЕНИЯ | 1997 |
|
RU2175780C2 |
| Автооператор | 1977 |
|
SU621573A1 |
| DE 3908785 A1, 27.09.1990. | |||

