Изобретение относится к области морской навигации, в частности к способу использования навигационной гидроакустической системы для определения мест автономных подводных аппаратов относительно точки на дне моря, например, при выполнении научно-исследовательских, поисковых и других работ под водой.
В морской навигации известен способ использования навигационной гидроакустической системы группой автономных подводных аппаратов, основанный на определении места автономного подводного аппарата относительно точки на дне моря, обозначенной двумя или более донными гидроакустическими маяками-ответчиками навигационной гидроакустической системы, в котором путем измерения интервалов времени распространения акустического сигнала от подводного аппарата до маяков-ответчиков навигационной гидроакустической системы и обратно определяются расстояния до маяков-ответчиков. Место аппарата находится как точка пересечения сфер, центры которых расположены в точках установки маяков-ответчиков, а радиусы равны наклонным расстояниям от маяков-ответчиков до аппарата [1-3].
Однако при групповых действиях автономных подводных аппаратов в одном районе работ использование маяков-ответчиков этим способом затруднено из-за появления взаимных помех. Кроме того, маяки-ответчики излучают сигналы на запросы каждого подводного аппарата, что приводит к нерациональному расходованию энергоресурса маяков-ответчиков и сокращает срок работы навигационной гидроакустической системы.
Наиболее близким техническим решением является способ использования навигационной гидроакустической системы группой автономных подводных аппаратов, основанный на определении места автономного подводного аппарата относительно точки на дне моря, обозначенной тремя или более донными гидроакустическими маяками навигационной гидроакустической системы, в котором путем измерения на борту подводного аппарата интервалов времени между приемом акустических сигналов, синхронно излучаемых маяками навигационной гидроакустической системы, работающей по непрерывной программе, определяются разности расстояний до маяков. Место подводного аппарата находится как точка пересечения гиперболоидов вращения, в фокусах которых находятся маяки, и плоскости, проходящей через подводный аппарат параллельно плоскости истинного горизонта [4] - прототип. Этот способ не имеет ограничений по количеству автономных подводных аппаратов в пределах рабочей зоны навигационной гидроакустической системы, использующих навигационную гидроакустическую систему, однако ему присущи следующие недостатки. Практика показывает, что излучение акустических сигналов по непрерывной программе без запроса приводит к существенному сокращению срока службы маяков из-за нерационального расходования их энергоресурса, что вызывает сокращение срока работы навигационной гидроакустической системы. Кроме того, из-за нестабильности опорных генераторов и возникающих погрешностей формирования интервалов времени в маяках, нарушается синхронность излучения акустических сигналов маяками, что увеличивает погрешности определения места автономного подводного аппарата и вызывает сокращение срока работы навигационной гидроакустической системы.
Техническим результатом предлагаемого способа является увеличение срока работы навигационной гидроакустической системы с тремя или более донными маяками-ответчиками при групповых действиях автономных подводных аппаратов в одном районе работ путем сокращения числа излучений маяками-ответчиками гидроакустических сигналов за счет одновременного определения мест всех подводных аппаратов группы при опросе по гидроакустическому сигналу-команде одного из подводных аппаратов группы (ведущего подводного аппарата) маяков-ответчиков одним из маяков-ответчиков (ведущим маяком-ответчиком).
Технический результат достигается тем, что по гидроакустическому сигналу-команде ведущего подводного аппарата ведущий маяк-ответчик излучает гидроакустический сигнал запроса, общий для остальных (ведомых) маяков-ответчиков, а ведомые маяки-ответчики по сигналу запроса от ведущего маяка-ответчика излучают гидроакустические сигналы ответа. На борту подводных аппаратов осуществляется прием сигнала запроса от ведущего маяка-ответчика и сигналов ответа от ведомых маяков-ответчиков и измеряются интервалы времени между приемом сигнала запроса от ведущего маяка-ответчика и приемом сигналов ответа ведомых маяков-ответчиков. Место каждого подводного аппарата определяется по разностям расстояний до ведущего маяка-ответчика и до каждого ведомого маяка-ответчика, определенных по измеренным интервалам времени. Место подводного аппарата находится как точка пересечения гиперболоидов вращения, число которых соответствует числу гидроакустических баз, образованных парами «ведущий-ведомый» маяков-ответчиков, а фокусы расположены в точках установки соответствующих маяков-ответчиков, с горизонтальной плоскостью, проходящей через подводный аппарат.
Сопоставимый анализ заявляемого технического решения с прототипом показывает, что заявляемый способ отличается от известного тем, что маяки-ответчики излучают гидроакустические сигналы только при опросе их ведущим маяком-ответчиком по гидроакустическому сигналу-команде ведущего подводного аппарата, но при этом производится определение своего места всеми подводными аппаратами группы. Таким образом, заявляемый способ соответствует критерию изобретения "новизна".
Известны технические решения [4, 5], в которых гидроакустические маяки-ответчики НГС излучают гидроакустические сигналы по сигналу запроса одного из маяков-ответчиков, но при этом не обеспечивается прием на борту подводного аппарата сигнала запроса ведущим маяком-ответчиком ведомых маяков-ответчиков и сигналов ответа ведомых маяков-ответчиков для определения места подводного аппарата. Это позволяет сделать вывод о соответствии предлагаемого способа критерию "изобретательский уровень".
Излучение гидроакустических сигналов маяками-ответчиками при опросе их ведущим маяком-ответчиком по гидроакустическому сигналу-команде ведущего автономного подводного аппарата и однократное определение мест всех подводных аппаратов группы по однократным посылкам акустических сигналов маяками-ответчиками в предлагаемом способе обеспечивает уменьшение количества посылок акустических сигналов маяками-ответчиками и, вследствие этого, увеличение срока работы навигационной гидроакустической системы.
Предлагаемый способ использования навигационной гидроакустической системы группой автономных подводных аппаратов может быть реализован следующим образом.
Определения мест подводных аппаратов производят аппаратурой потребителя навигационной гидроакустической системы СНП-10. Предварительно осуществляется модернизация аппаратуры потребителя навигационной гидроакустической системы подводных аппаратов и ведущего маяка-ответчика.
Аппаратура потребителя навигационной гидроакустической системы подводных аппаратов модернизируется таким образом, чтобы иметь возможность использовать ее в режиме работы, в котором счетчики интервалов времени запускаются в момент приема сигнала запроса маяков-ответчиков ведущим маяком-ответчиком и останавливаются каждый в моменты приема сигнала ответа соответствующего маяка-ответчика.
Аппаратура ведущего маяка-ответчика модернизируется таким образом, чтобы по гидроакустическому сигналу-команде ведущего подводного аппарата излучать гидроакустический сигнал запроса, общий для остальных (ведомых) маяков-ответчиков.
В процессе работы в районе на борту подводных аппаратов периодически, при излучении ведущим подводным аппаратом гидроакустического сигнала-команды ведущему маяку-ответчику, осуществляется прием аппаратурой потребителя навигационной гидроакустической системы сигнала запроса от ведущего маяка-ответчика и сигналов ответа от ведомых маяков-ответчиков и измеряются интервалы времени между их приемом, определяются разности расстояний до ведущего маяка-ответчика и соответствующего ведомого маяка-ответчика.
Место подводного аппарата определяется относительно ведущего маяка-ответчика в системе координат с географической ориентацией осей (при использовании навигационной гидроакустической системы с двумя гидроакустическими базами - см. чертеж. Центр 0 системы координат совпадает с точкой установки ведущего маяка-ответчика ВЩ, ось 7 направлена на восток, 2 - на север, 6 - вверх) путем решения системы нелинейных уравнений (1).

где i=1, 2, ...k (k - число ведомых BM1, ВМ2, ...BMk маяков-ответчиков);
ΔLi - разность расстояний до ведущего ВЩ маяка-ответчика и i-тового ведомого маяка-ответчика;
Di - длина i-товой гидроакустической базы (D1, D2, ...Dk);
хi=е·cosΘi-n·sinΘi·cosγi-h·sinΘi·sinγi;
yi=е·sinΘi+n·cosΘi·cosγi+h·cosΘi·sinγi;
xi=-n·sinγi+h·cosγi;
h - возвышение 5 подводного аппарата ПА над ведущим маяком-ответчиком;
gВЩМО - глубина установки ведущего маяка-ответчика;
gПА - глубина подводного аппарата;
е - искомая координата 8 места подводного аппарата по оси 7;
n - искомая координата 1 места подводного аппарата по оси 2;
Θi - угол ориентации i-товой базы относительно принятой системе координат в плоскости горизонта (4, 9).
γi - углы ориентации i-товой базы относительно принятой системе координат в вертикальной плоскости (3, 10).
Срок работы навигационной гидроакустической системы СНП-10 с маяками-ответчиками типа «прибор 16», у которого общее количество ответов на запросы составляет не менее 5000 [2], при использовании ее предлагаемым способом для определения места группы автономных подводных аппаратов каждые 3 мин составляет 250,0 ч.
Срок работы навигационной гидроакустической системы СНП-10 при использовании ее известным способом для определения места с той же частотой группы из двух автономных подводных аппаратов составляет 125,0 ч, группы из трех автономных подводных аппаратов - 83,3 ч, группы из четырех автономных подводных аппаратов - 62,5 ч.
Таким образом, применение предлагаемого способа позволяет увеличить срок работы навигационной гидроакустической системы СНП-10 в 2-4 раза.
Предлагаемый способ использования навигационной гидроакустической системы группой автономных подводных аппаратов может быть реализован на аппаратуре потребителей и маяках-ответчиках большинства навигационных гидроакустических систем с несколькими маяками-ответчиками.
Применение предлагаемого способа использования навигационной гидроакустической системы подводными аппаратами с определением места по разностям расстояний до маяков-ответчиков обеспечивает по сравнению с существующими способами следующее преимущество.
Прием на подводных аппаратах сигналов запроса маяков-ответчиков ведущим маяком-ответчиком и сигналов ответа маяков-ответчиков позволяет определять места подводных аппаратов без специально для каждого подводного аппарата излучения маяками-ответчиками гидроакустических сигналов, что позволяет сократить число излучений маяками-ответчиками гидроакустических сигналов и существенно увеличить срок работы навигационной гидроакустической системы при групповых действиях автономных подводных аппаратов в одном районе работ.
Источники информации:
1. Практическое кораблевождение / Под ред. А.П.Михайловского. - Л.: ГУНиОМО, 1988, - 896 с.
2. Навигационная гидроакустическая система СНП-10 / Авт.: А.Д.Бокарев, Е.А.Иванов, Г.И.Снегирев. - Записки по гидрографии, №216, 1986, с.59-63.
3. Определение прямоугольных координат места с помощью системы СНП-20. - Записки по гидрографии, №211, 1984, с.90-96.
4. В.И.Бородин, Г.Е.Смирнов, Н.А.Толстякова, Г.В.Яковлев. Гидроакустические навигационные средства. Л.: Судостроение, 1983, - 262 с.
5. Некоторые особенности современных гидроакустических систем с маяками-ответчиками / Авт.: А.И.Монахов, А.В.Торопыгин, Г.В.Яковлев. - Судостроение за рубежом, №1, 1990, с.72-84.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПОЛЬЗОВАНИЯ НАВИГАЦИОННОЙ ГИДРОАКУСТИЧЕСКОЙ СИСТЕМЫ ПОДВОДНЫМИ АППАРАТАМИ С ОПРЕДЕЛЕНИЕМ МЕСТА ПО РАЗНОСТЯМ РАССТОЯНИЙ ДО ВЕДУЩЕГО ПОДВОДНОГО АППАРАТА И МАЯКОВ-ОТВЕТЧИКОВ | 2005 |
|
RU2285273C1 |
| Способ определения координат автономного необитаемого подводного аппарата сверхглубокого погружения и гидроакустической донной станции связи и навигации по гидроакустическому каналу | 2023 |
|
RU2828701C1 |
| Способ навигационной поддержки группы специализированных подводных аппаратов, выполняющих общую миссию в мелководной акватории | 2023 |
|
RU2819199C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| АРКТИЧЕСКАЯ ПОДВОДНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ И НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ НАДВОДНЫХ И ПОДВОДНЫХ ОБЪЕКТОВ НАВИГАЦИИ В СТЕСНЕННЫХ УСЛОВИЯХ ПЛАВАНИЯ | 2015 |
|
RU2596244C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| Гидроакустический комплекс позиционирования и связи для навигационно-информационного обеспечения автономных необитаемых подводных аппаратов | 2023 |
|
RU2812089C1 |
Изобретение относится к области морской навигации, в частности к способу использования навигационной гидроакустической системы для определения мест автономных подводных аппаратов относительно точки на дне моря, например, при выполнении научно-исследовательских, поисковых и других работ под водой. Способ использования навигационной гидроакустической системы подводными аппаратами заключается в одновременном определении мест всех подводных аппаратов группы при опросе по гидроакустическому сигналу-команде одного из подводных аппаратов группы (ведущего) маяков-ответчиков одним из маяков-ответчиков (ведущим). Место каждого подводного аппарата определяется по разностям расстояний до ведущего маяка-ответчика и до каждого ведомого маяка-ответчика, определенных по измеренным интервалам времени между приемом акустического сигнала запроса маяков-ответчиков ведущим маяком-ответчиком и акустических сигналов ответа ведомых маяков-ответчиков. Место подводного аппарата находится как точка пересечения гиперболоидов вращения, число которых соответствует числу пар «ведущий-ведомый» маяков-ответчиков, а фокусы расположены в точках установки соответствующих маяков-ответчиков и плоскости, проходящей через центр гидроакустической антенны подводного аппарата параллельно плоскости истинного горизонта. Технический результат - увеличение срока работы навигационной гидроакустической системы с тремя или более донными маяками-ответчиками при групповых действиях автономных подводных аппаратов. 1 ил.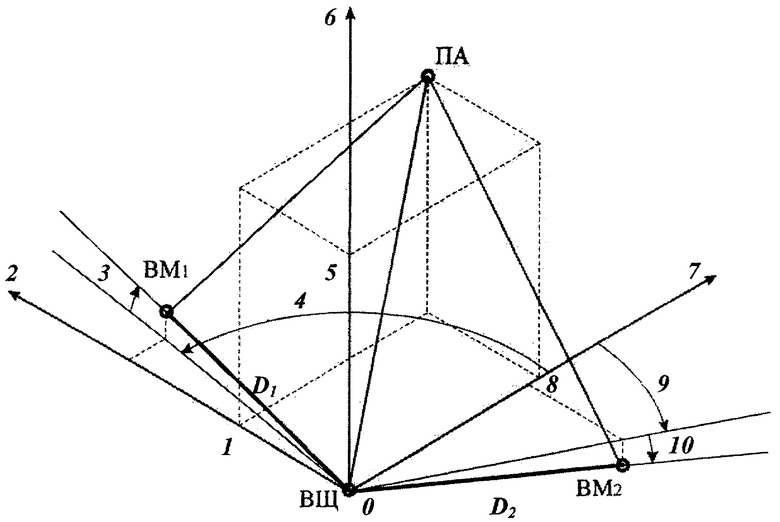
Способ использования навигационной гидроакустической системы подводными аппаратами с определением места по разностям расстояний до маяков-ответчиков, заключающийся в излучении на одном из подводных аппаратов группы (ведущем подводном аппарате) гидроакустического сигнала-команды одному из донных маяков-ответчиков навигационной гидроакустической системы (ведущему маяку-ответчику), излучении ведущим маяком-ответчиком гидроакустического сигнала запроса остальных донных маяков-ответчиков навигационной гидроакустической системы (ведомых маяков-ответчиков), излучении ведомыми маяками-ответчиками гидроакустического сигнала ответа, приеме на подводных аппаратах гидроакустического сигнала запроса ведомых маяков-ответчиков ведущим маяком-ответчиком и сигналов ответа ведомых маяков-ответчиков, измерении на подводных аппаратах интервалов времени между приемом гидроакустического сигнала запроса ведомых маяков-ответчиков ведущим маяком-ответчиком и сигналов ответа ведомых маяков-ответчиков и глубины погружения подводного аппарата, определении на подводных аппаратах по измеренным интервалам времени разностей расстояний до ведущего маяка-ответчика и каждого ведомого маяка-ответчика и величины возвышения подводного аппарата над ведущим маяком-ответчиком по измеренной глубине подводного аппарата и известной на подводном аппарате глубины установки ведущего маяка-ответчика, по которым определяется место подводного аппарата относительно маяков-ответчиков, отличающийся тем, что маяки-ответчики излучают гидроакустические сигналы при опросе их ведущим маяком-ответчиком по гидроакустическому сигналу-команде ведущего подводного аппарата и при этом производится определение мест всех подводных аппаратов группы.
| БОРОДИН В.И | |||
| и др | |||
| Гидроакустические навигационные средства | |||
| - Л.: Судостроение, 1983, 262 с | |||
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1995 |
|
RU2084924C1 |
| СПОСОБ ПОДВОДНОЙ НАВИГАЦИИ ПРИ ОПРЕДЕЛЕНИИ КООРДИНАТ ИСКУССТВЕННОЙ ПОЛЫНЬИ | 1996 |
|
RU2115136C1 |
| US 6771563 B1, 03.08.2004 | |||
| ТЕХНИЧЕСКАЯ " БИБЛИОТ[;:АГ. Г. Фишер | 0 |
|
SU165274A1 |

