Изобретение относится к области машиностроения, в частности к исполнительным механизмам роботов-манипуляторов.
Известен исполнительный механизм робота-манипулятора, содержащий основание, схват, рычажные звенья, каждое из которых связано одним концом с приводом.
Недостаток известного исполнительного механизма заключается в том, что его перемещаемые звенья с установленными на них приводами имеют большой вес и взаимовлияют друг на друга. Это снижает грузоподъемность устройства, ухудшает его динамические характеристики и приводит к увеличению энергозатрат.
Наиболее близким по технической сущ-- ности к предложенному является исполнительный механизм робота, содержащий в базовой плоскости основание, два шарнир- но связанных с ним кривошипа, с размещением приводных двигателей в шарнирах, а также два шатуна, шарнирно связанных между собой и с кривошипами, на одном из шатунов установлен схват.
Основным недостатком данного испол- нительного-механизма являются его низкие эксплуатационные возможности, ввиду наличия одного рабочего органа. Это, во-пер- вых,ограничивает . диапазон
технологических операций, выполняемых данным манипулятором, во-вторых, обеспечивает транспортировку только одного объекта манипулирования, что определяет низкую производительность манипулятора.
Целью изобретения является повышение производительности исполнительного механизма робота за счет одновременной работы с двумя объектами манипулирования.
Указанная цель достигается тем, что исполнительный механизм робота, содержащий основание, два основных кривошипа, связанные с основанием посредством шарниров, два основных шатуна, шарнирно связанных между собой и каждый из которых шарнирно связан с соответственным. , основ- ным кривошипом, и основной захват и приводные двигатели, связанные с шарнирами, соединяющими основные кривошипы с основанием, снабжен дополнительным захватом, шатуном и кривошипом, последний из которых шарнирно связан с основанием и с дополнительным шатуном, а основной и дополнительный захваты установлены соответственно на одном из основных и на дополнительном шатунах.
На фиг. 1 показана кинематическая схема предлагаемого исполнительного механизма робота; на фиг. 2 (а, б) - пример
манипулирования двумя объектами; на фиг. 3 (а, б, в) - то же, одним объектом.
Исполнительный механизм робота содержит основание 1, кривошипы 2-4, причем кривошипы 2, 3 шарнирно связаны с приводными двигателями 5, 6, расположенными на основании 1, а кривошип 4 шарнирно соединен с основанием 1. Кривошипы 2-4 шарнирно соединены с шатунами 7-9,
0 соответственно, которые шарнирно связаны между собой. Шатуны 7-9 могут быть выполнены в виде базисных звеньев, причем два из них - 7,9 - снабжены захватами 10, 11 соответственно. Кривошипы 2, 3 и
5 шатуны 7, 8 образуют замкнутый пятизвен- ный механизм, к которому присоединен дву- звенник, состоящий из двух звеньев - кривошипа 4 и шатуна 9.
Исполнительный механизм робота ра0 ботает следующим образом.
Кривошипы 2, 3 от двигателей 5, 6 совершают вращение на требуемые углы, определяемые путем решения обратной задачи кинематики для данного механизма.
5 При этом координаты положения захватов 10, 11 рабочих органов определяются угловым положением кривошипов 2 и 3, причем требуемое перемещение захвата 11 осуществляется путем передачи движения от кри0 вошипов 2, 3 через шатуны 7, 8 на шатун 9. В зависимости от вида технологической операции работа исполнительного механизма робота может осуществляться в двух режимах.
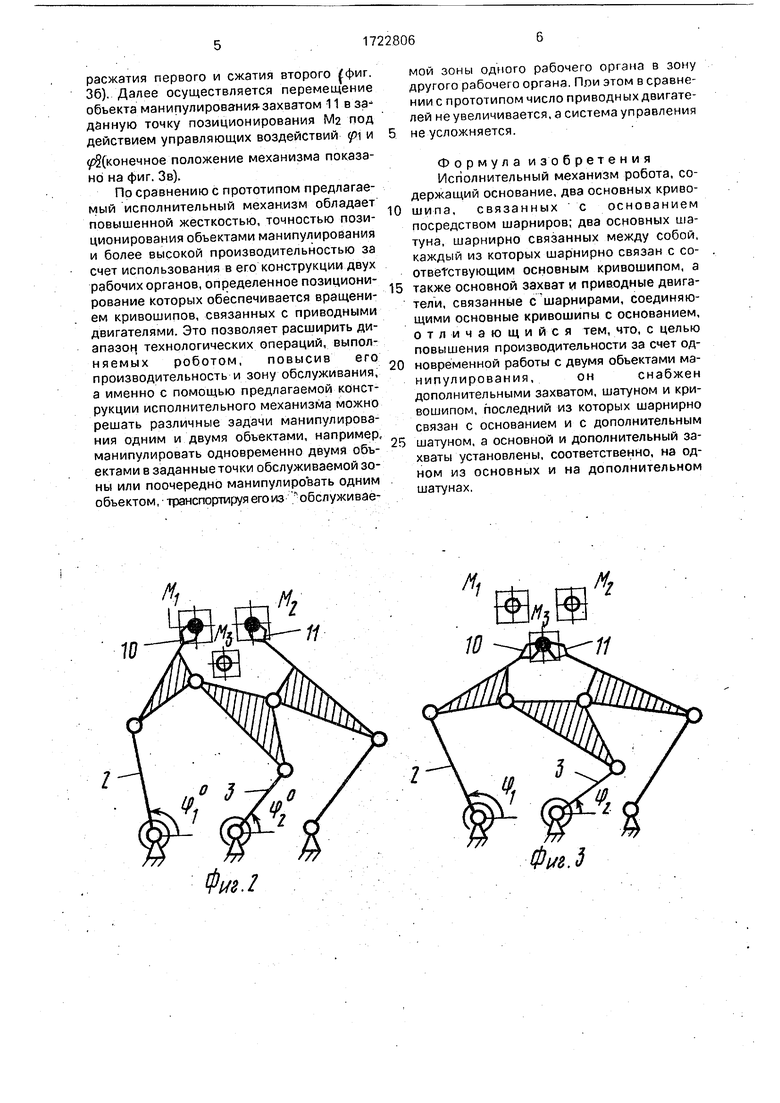
5В первом режиме осуществляется одновременное манипулирование двумя объектами (фиг. 2). В исходном положении механизма (фиг. 2а) с начальными угловыми
координатами кривошипов 2, 3 рУ и $ , соответственно, осуществляется захватывание захватами 10 и 1.1 объектов манипулирования с рабочих позиций М/) и М. Далее осуществляется перемещение объектов в заданную точку позиционирования Мз под действием управляющих воздействий р и (фиг. 26).
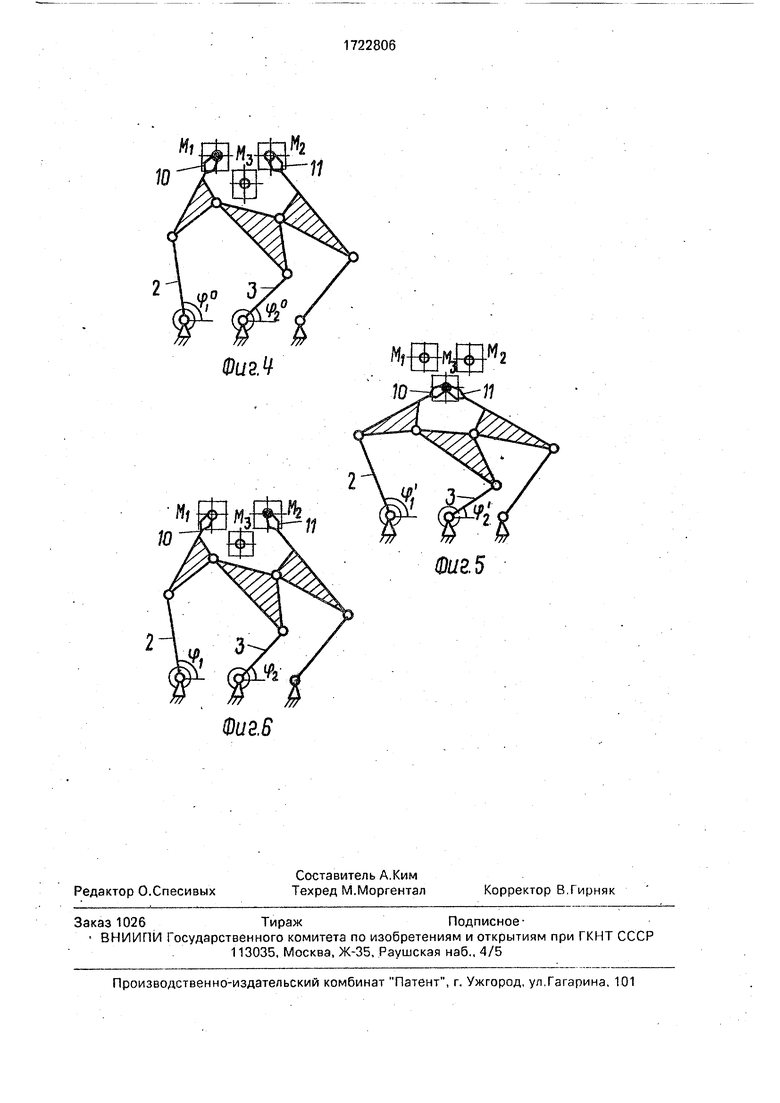
Во втором режиме осуществляется поочередное манипулирование одним объекQ том (фиг. 3). При этом в исходном положении механизма с начальными угловыми координатами кривошипов 2, 3 #э и у$ , соответственно, происходит захватывание объекта манипулирования захватом 10 в рабочей по5 зиции М (фиг. За). Затем осуществляется перемещение манипулируемого объекта в промежуточную позицию М под действием
управляющих воздействий / и у$ и его передача от захвата 10 к захвату 11 путем
0
5
расжатия первого и сжатия второго /фиг. 36). Далее осуществляется перемещение объекта манипулирования-захватом 11 в за данную точку позиционирования М2 под действием управляющих воздействий р и
(конечное положение механизма показано на фиг. Зв).
По сравнению с прототипом предлагаемый исполнительный механизм обладает повышенной жесткостью, точностью позиционирования объектами манипулирования и более высокой производительностью за счет использования в его конструкции двух рабочих органов, определенное позиционирование которых обеспечивается вращением кривошипов, связанных с приводными двигателями. Это позволяет расширить диапазон технологических операций, выпол- няемых роботом, повысив его производительность и зону обслуживания, а именно с помощью предлагаемой конструкции исполнительного механизма можно решать различные задачи манипулирования одним и двумя объектами, например, манипулировать одновременно двумя объектами в заданные точки обслуживаемой зоны или поочередно манипулировать одним объектом, транспортируя его из обслуживавмой зоны одного рабочего органа в зону другого рабочего органа. Пли этом в сравнении с прототипом число приводных двигателей не увеличивается, а система управления не усложняется.
Формула изобретения Исполнительный механизм робота, содержащий основание, два основных кривошипа, связанных с основанием посредством шарниров; два основных шатуна, шарнирно связанных между собой, каждый из которых шарнирно связан с соответствующим основным кривошипом, а
также основной захват и приводные двигатели, связанные с шарнирами, соединяющими основные кривошипы с основанием, отличающийся тем, что, с целью повышения производительности за счет одновременной работы с двумя объектами манипулирования,онснабжен дополнительными захватом, шатуном и кривошипом, последний из которых шарнирно связан с основанием и с дополнительным
шатуном, а основной и дополнительный захваты установлены, соответственно, на одном из основных и на дополнительном шатунах.
Фиг.б
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный механизм робота | 1991 |
|
SU1798176A1 |
| ПРОСТРАНСТВЕННЫЙ РЕГУЛИРУЕМЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РОБОТА | 2003 |
|
RU2245241C2 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ПРЕДМЕТОВ | 1999 |
|
RU2154569C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| Манипулятор | 1988 |
|
SU1563969A1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| Исполнительное устройство манипулятора | 1986 |
|
SU1366384A1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
Использование: автоматизация технологических процессов машиностроения. Сущность изобретения: исполнительный механизм робота содержит основание 1, основные 2 и 3 и дополнительный 4 кривошипы, шарнирно связанные с основанием 1 и соответственно с основными 7 и 8 и дополнительным 9 шатунами, которые шарнирно связаны между собой. Двигатели 5 и 6 установлены в шарнирах, связывающих основание с основными кривошипами 2 и 3, а основной 10 и дополнительный 11 захваты - соответственно на основном 7 и дополнительном 9 шатунах. 6 ил. 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
