Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке ракетных комплексов, например, с носителями на земле, в которых применяются лучевые системы теленаведения, системы самонаведения и др.
Известны способ управления ракетой и система наведения ракеты для его осуществления [патент РФ № 2241950 от 10.12.04 г. МПК7 F 41 G 7/24, F 42 B 15/01].
Способ управления ракетой заключается в том, что преобразуют электромагнитное излучение с пункта управления в электрические сигналы координат ракеты по курсу и тангажу, формируют команды управления ракетой по курсу и тангажу, причем команду управления по курсу формируют из электрического сигнала координаты по курсу, дополнительно на ракете программно вырабатывают первую дополнительную команду, пропорциональную величине провисания ракеты, вырабатывают вторую дополнительную команду, интегрируя электрический сигнал по тангажу, а затем суммируют первую и вторую дополнительные команды и электрический сигнал координаты по тангажу и из суммарной величины формируют команду управления ракетой по тангажу.
Известная система наведения ракеты содержит аппаратуру пункта управления, а на ракете - последовательно включенные приемник и блок выделения координат, выход по курсу которого соединен с первым входом автопилота, при этом вход приемника связан с аппаратурой пункта управления, введены сумматор, блок компенсации, интегратор и блок включения интегратора, связанный с управляющим входом интегратора, сигнальный вход интегратора соединен с выходом блока выделения координат по тангажу, подключенного к первому входу сумматора, второй вход которого соединен с выходом интегратора, а третий - с блоком компенсации, при этом выход сумматора соединен со вторым входом автопилота.
Последовательно включенные приемник и блок выделения координат в известной системе наведения ракеты в целом представляют собой бортовую аппаратуру ["Основы радиоуправления" /Под ред. Вейцеля В.А. и Типугина В.Н. Москва, Сов. радио, 1973 г., стр.276, рис.5.3], при этом известное техническое решение предназначено для применения в лучевой системе теленаведения.
В известном техническом решении повышена точность наведения ракеты в канале тангажа за счет компенсации постоянной и переменной составляющих возмущений, обусловленных весом ракеты, при этом интегратор, компенсирующий переменную составляющую, обладает достаточно большой постоянной времени и начинает работать с момента окончания переходного процесса (после встреливания ракеты в луч).
Движение ракеты состоит из быстрых колебаний ракеты относительно центра масс, в процессе которых наиболее заметно происходит изменение угла тангажа и угла атаки, называемое короткопериодическим, и медленное изменение положения центра масс в пространстве, называемое длиннопериодическим. Короткопереодические колебания возникают при скачкообразном возмущающем воздействии, что вызывает мгновенное отклонение руля на некоторый угол, например, при встреливании ракеты в луч (теленаведение в луче) или в момент захвата головкой самонаведения цели, при прерывании линии связи в момент ее восстановления и т.д., что приводит к переходному процессу. Короткопериодические колебания отличаются от длиннопериодических по частоте в десятки раз [В.Т.Кочетков, А.М.Половко, В.М.Пономарев "Теория систем телеуправления и систем самонаведения ракет", изд. "Наука", Москва, 1964 г., стр.106-108].
Характер короткопериодических колебаний, например, по тангажу при управляемом полете отражается на изменении высоты полета или угла наклона траектории, что может привести при полете ракеты низко над поверхностью к ее падению, а при малых углах диаграммы направленности приемных устройств в бортовой аппаратуре к потере ракеты при встреливании ракеты в луч (система теленаведения в луче) или в момент захвата головкой самонаведения цели (система самонаведения).
Таким образом, недостатком известных способа и устройства является высокая вероятность потери ракеты при возникновении короткопериодических колебаний, т.е. низкая надежность.
Задачей настоящего изобретения (способа и устройства) является повышения надежности за счет уменьшения амплитуды короткопериодических колебаний.
Поставленная задача решается за счет того, что в способе управления ракетой (первый вариант), при котором на ракете вырабатывают две команды соответственно по курсу и тангажу в двух соответствующих плоскостях, при этом из первой команды формируют первую команду управления ракетой в первой плоскости, во второй плоскости измеряют и преобразуют в электрический сигнал угловую скорость вращения продольной оси ракеты, из которого на частоте собственных колебаний ракеты выделяют сигнал, пропорциональный амплитуде собственных колебаний ракеты, которым формируют компенсирующую команду, величиной, учитывающей величину выделенного сигнала, суммируют компенсирующую команду со второй командой и из суммарной команды формируют вторую команду управления ракетой.
Способ управления ракетой (второй вариант), включающий формирование на ракете двух команд соответственно по курсу и тангажу в двух соответствующих плоскостях, при котором в первой и второй плоскостях измеряют и преобразуют в электрические сигналы угловую скорость вращения продольной оси ракеты, из которых на частоте собственных колебаний ракеты выделяют первый и второй сигналы, пропорциональные амплитуде собственных колебаний ракеты соответственно в первой и второй плоскостях, первым и вторым сигналами с учетом их величин формируют соответственно первую и вторую компенсирующие команды, которые суммируют соответственно с первой и второй командами и из суммарных команд формируют соответственно команды управления ракетой.
Система управления ракетой (первый вариант), реализующая способ управления ракетой (первый вариант), содержит двухканальную бортовую аппаратуру, выход первого канала которой соединен с первым входом автопилота, выход второго канала бортовой аппаратуры соединен с первым входом сумматора, выход которого подключен ко второму входу автопилота, во второй канал дополнительно введены последовательно соединенные датчик угловой скорости, устройство выделения колебаний и формирователь компенсирующей команды, при этом выход формирователя компенсирующей команды соединен со вторым входом сумматора.
Система управления ракетой (второй вариант), реализующая способ управления ракетой (второй вариант), содержит двухканальную бортовую аппаратуру, выход первого канала которой соединен с первым входом первого сумматора, выход которого подключен ко второму входу автопилота, дополнительно введены во второй канал сумматор и в каждый канал цепочка, выполненная в виде последовательно соединенных датчика угловой скорости, устройства выделения колебаний и формирователя компенсирующей команды, выходы формирователей компенсирующих команд соединены со вторыми входами соответственно первого и второго сумматоров, причем выход второго канала бортовой аппаратуры соединен с первым входом второго сумматора, выход которого подключен к первому входу автопилота.
Заявленный способ управления ракетой (первый вариант) реализуется следующим образом. На ракете, например, с момента старта вырабатывают две команды соответственно по курсу "Z" и тангажу "У" в двух соответствующих плоскостях, при этом из первой команды, например по курсу "Z", формируют команду управления ракетой по курсу.
Измеряют (например, с момента старта) величину угловой скорости вращения продольной оси ракеты во второй плоскости, например, по тангажу "У" и преобразуют величину угловой скорости в электрический сигнал. Поскольку величина (напряжения или тока) электрического сигнала определяется величиной угловой скорости вращения (колебания) продольной оси ракеты, то величину электрического сигнала определяют две составляющие: длиннопериодические (низкочастотные) колебания, которые на управляемом участке полета компенсируются величиной команды управления ракетой, и сигнал с короткопериодическими колебаниями (на частоте собственных колебаний ракеты) из-за скачкообразных возмущающих воздействий, которые не компенсируются командой управления ракеты.
В связи с изложенным из электрического сигнала выделяют (например, по частотному признаку) сигнал, соответствующий во второй плоскости по частоте собственным колебаниям продольной оси ракеты и пропорциональный амплитуде собственных колебаний. Величиной этого сигнала формируют величину компенсирующей команды, которую суммируют со второй командой (по тангажу), а из суммарной команды формируют вторую команду управления ракетой.
Величина компенсирующей команды, как одна из составляющих второй команды управления ракетой, компенсирует вращение (с достаточно высокой скоростью) продольной оси ракеты относительно центра масс, при этом ее величина будет всегда равна (близка) к нулю.
Изложенный выше способ управления ракетой уменьшает амплитуду короткопериодических колебаний только в одной (наиболее критичной) второй плоскости, являющейся, например, вертикальной (по тангажу). Однако второй наиболее критичной плоскостью может быть и горизонтальная (по курсу). При этом вторая команда может состоять, например, как в известном способе управления ракетой [патент РФ № 2241950] по тангажу из суммарной величины первой и второй дополнительных команд и электрического сигнала координаты по тангажу, а по курсу - только из электрического сигнала координаты по курсу.
Заявленный способ управления ракетой (второй вариант) реализуется следующим образом. На ракете, например, с момента старта вырабатывают две команды соответственно курсу "Z" и тангажу "У" в двух соответствующих плоскостях. Измеряют в первой, например вертикальной, и второй, например горизонтальной, плоскостях величины угловых скоростей вращения продольной оси ракеты. Преобразуют угловые скорости вращения продольной оси ракеты в соответствующие два электрических сигнала, из которых на частоте собственных колебаний ракеты выделяют (например, по частотному признаку) первый и второй сигналы, пропорциональные амплитуде собственных колебаний соответственно в первой второй плоскостях.
Величинами первого и второго сигналов формируют соответственно первую и вторую компенсирующие команды, суммируемые соответственно с первой и второй командами, а из суммарных команд формируют соответственно команды управления ракетой.
Этот способ управления ракетой предназначен для компенсации вращения продольной оси ракеты как в двух плоскостях (по тангажу и курсу), так и в любой промежуточной между ними.
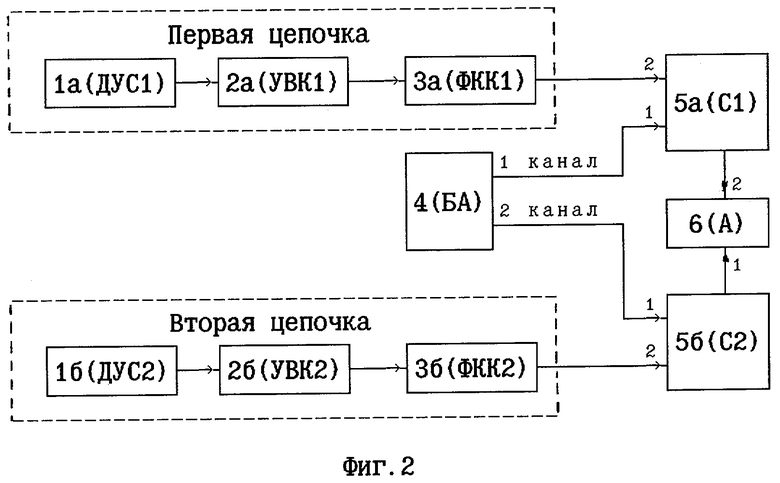
Предлагаемое изобретение поясняется чертежами, приведенными на фиг.1 и 2. На фиг.1 и 2 приведены структурные электрические схемы системы управления ракетой соответственно первого и второго варианта, где представлены: 1 - датчик угловой скорости (ДУС) и 1а, 1б - соответственно из первой цепочки (ДУС1) и второй цепочки (ДУС2), 2 - устройство выделения колебаний (УВК) и 2а, 2б - соответственно, из первой цепочки (УВК1) и второй цепочки (УВК2), 3 - формирователь компенсирующей команды (ФКК) и 3а, 3б - соответственно из первой цепочки (ФКК1) и второй цепочки (ФКК2), 4 - бортовая аппаратура (БА), 5 - сумматор (С) и 5а, 5б - соответственно первый (С1) и второй (С2) сумматоры, 6 - автопилот.
В системе управления ракетой (первый вариант) выход первого канала бортовой аппаратуры 4 соединен с первым входом автопилота 6. Выход второго канала бортовой аппаратуры 4 соединен с первым входом сумматора 5, выход которого подключен ко второму входу автопилота 6. Выход датчика угловой скорости 1 соединен со входом устройства выделения колебаний 2, выход которого подключен ко входу формирователя компенсирующей команды 3. Выход формирователя компенсирующей команды 3 соединен со вторым входом сумматора 5.
В системе управления ракетой (второй вариант) выход первого канала бортовой аппаратуры 4 соединен с первым входом первого сумматора 5а, выход первого сумматора 5а подключен ко второму входу автопилота 6. Первая цепочка и вторая цепочка выполнены в виде последовательно включенных соответственно первого 1а и второго 1б датчиков угловой скорости, первого 2а и второго 2б устройств выделения колебаний и первого 3а и второго 3б формирователей компенсирующих команд. Выходы формирователей компенсирующих команд из первой 3а и второй 3б цепочек соединены со вторыми входами соответственно первого 5а и второго 5б сумматоров. Выход второго канала бортовой аппаратуры 4 соединен с первым входом второго сумматора 5б, выход которого подключен к первому входу автопилота 6.
Датчики угловой скорости 1, 1a и 1б могут быть выполнены на основе скоростных гироскопов, используемых также в качестве корректирующих устройств в системе автоматического регулирования, т.к. при их использовании вводится производная в закон регулирования [В.А.Павлов, С.А.Понырко, Ю.М.Хованский "Стабилизация летательных аппаратов и автопилоты". Высшая школа, 1964 г., стр.97]. Устройства выделения колебаний 2, 2а и 2б могут быть выполнены, например, в виде фильтра высоких частот, частота среза которого равна минимально возможной величине частоты собственных колебаний ракеты [Основы радиоуправленияю /Под ред. Вейцеля В.А. и Типугина В.Н. Москва, Сов. радио, 1973 г., стр.47].
Формирователи компенсирующих команд 3, 3а и 3б могут быть выполнены, например, как последовательно соединенные аналого-цифровой преобразователь, программно-запоминающее устройство и цифроаналоговый преобразователь, причем программно-запоминающее устройство, например микросхема 556РТ7, на адресные входы строк и столбцов которой подают соответственно старшие и младшие разряды двоичного числа с выхода аналого-цифрового преобразователя.
Бортовая аппаратура 4 может быть выполнена, как в прототипе (для лучевой системы теленаведения), и содержать последовательно соединенные приемник и блок выделения координат либо как головка самонаведения (в системе самонаведения), измеряющая параметр рассогласования по курсу "Z" и тангажу "У", при этом в нее могут входить также корректирующие устройства, используемые в системе автоматического регулирования. Сумматоры 5, 5а и 5б, а также автопилот 6, например, как в прототипе.
Заявленная система управления ракетой, реализующая способ управления ракетой (первый вариант), приведенная на фиг.1, работает следующим образом. В первоначальный момент времени, перед сходом управляемой ракеты с пусковой установки, раскручивают ротор гироскопа в датчике угловой скорости 1, "запоминающем" положение продольной оси ракеты, например, по тангажу на пусковой установке, при этом на выходе датчика угловой скорости 1 будет, например, нулевое напряжение.
После схода ракеты с пусковой установки она начинает управляться автономной системой управления, а затем основной (системой теленаведения в луче, системой самонаведения и др.), т.е. вначале она управляется командами первого канала, например по курсу, и второго - по тангажу, с выходов бортовой аппаратуры 4, при этом, например, по тангажу - команда, компенсирующая вес ракеты, а по курсу - нулевая. Затем с момента начала работы основной системы управления бортовая аппаратура 4 формирует команды на выходах первого и второго каналов с учетом отклонения траектории полета ракеты от направления на цель.
В момент времени, например, перехода от автономной системы управления к основной возникает переходной процесс в виде короткопериодических колебаний, например, по тангажу "У", которые фиксирует датчик угловой скорости 1 и преобразует их в электрический сигнал. При этом перегрузки, возникающие из-за действия команды наведения ракеты на цель, также фиксирует датчик 1 и преобразует их в электрический сигнал, который значительно ниже по частоте, чем электрический сигнал, вызванный короткопериодическими колебаниями.
Этот суммарный сигнал поступает на вход устройства выделения колебаний 2, выделяющего электрический сигнал с короткопериодическими колебаниями на частоте собственных колебаний ракеты, который преобразуется в формирователе компенсирующей команды 3 в команду, т.е. электрический сигнал, величина которого соответствует величине колебания ракеты и обратная знаку направления колебания ракеты.
Команда с выхода первого канала блока аппаратуры 4 поступает на первый вход автопилота 6, а команда с выхода второго канала блока аппаратуры 4 поступает на первый вход сумматора 5, на второй вход которого поступает команда с выхода формирователя компенсирующей команды 3. Просуммированный сигнал с выхода сумматора 5 подается на второй вход автопилота 6. Автопилот 6 формирует из этих команд команды управления ракетой, которые отрабатываются в автопилоте 6 рулевым приводом, и ракета движется по траектории полета, совпадающей с направлением ракеты на цель. При этом при возникновении короткопериодических колебаний ракеты во втором канале они скомпенсируются.
Таким образом, в системе управления ракетой компенсируются колебания только во втором канале, который может быть либо тангажным (как изложено выше), либо курсовым.
Заявленная система управления ракетой, реализующая способ управления ракетой (второй вариант), приведенная на фиг.2, работает аналогично первому варианту за исключением того, что содержит две цепочки. При этом первая цепочка, например по курсу, состоящая из последовательно включенных датчика угловой скорости 1а, устройства выделения колебаний 2а и формирователя компенсирующей команды 3а, а также вторая цепочка, например по тангажу, состоящая из последовательно включенных датчика угловой скорости 1б, устройства выделения колебаний 2б и формирователя компенсирующей команды 3б, формируют по выходам формирователей корректирующих команд 3а и 3б соответствующие компенсирующие команды.
Электрические сигналы, соответствующие командам наведения ракеты на цель, с выходов первого и второго каналов бортовой аппаратуры 4 поступают на первые входы соответственно первого 5а и второго 5б сумматоров, на вторые входы которых подаются компенсирующие команды по курсу и тангажу с выходов формирователей компенсирующих команд соответственно 3а и 3б. Суммарные команды с выходов первого 5а и второго 5б сумматоров поступают соответственно на второй и первый входы автопилота 6.
Автопилот 6 формирует из суммарных команд команды управления ракетой, которые отрабатываются в автопилоте 6 рулевым приводом. При этом при возникновении короткопериодических колебаний ракеты по курсу и тангажу они скомпенсируются.
Таким образом, предлагаемое изобретение - способ управления ракетой (варианты) и система управления ракетой для его осуществления (варианты) - позволяет исключить потерю ракеты при возникновении скачкообразных возмущений в одном из каналов (первый вариант) или в обоих каналах (второй вариант), что существенно повышает надежность управления ракетой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241951C1 |
| СПОСОБ ВВОДА РАКЕТЫ В ЗОНУ ЛУЧА И КОМПЛЕКС ТЕЛЕУПРАВЛЯЕМОЙ В ЛУЧЕ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2257522C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2005 |
|
RU2289086C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2266513C1 |
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ В ЛУЧЕ И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2421680C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ РАКЕТОЙ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И РАКЕТА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242698C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2266514C1 |
| СПОСОБ ВВОДА В ЗОНУ УПРАВЛЕНИЯ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И РАКЕТНЫЙ КОМПЛЕКС | 2007 |
|
RU2362107C2 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2004 |
|
RU2280233C1 |
Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке ракетных комплексов, например, с носителями на земле, в которых применяются лучевые системы теленаведения, системы самонаведения. Технический результат - повышение надежности. Предложены два способа управления ракетой, в которых измеряют величину угловой скорости вращения продольной оси ракеты в одной плоскости (например, по тангажу) либо в двух (по тангажу и курсу) соответственно преобразуемых в электрический сигнал, из которого на частоте собственных колебаний ракеты выделяют сигнал, пропорциональный амплитуде соответствующих собственных колебаний, величиной которых формируют величину компенсирующей команды (либо команд), суммируемых с командой (либо командами), из которых формируют команду (команды) управления ракетой. Ракета (первый вариант) снабжена в одном из каналов датчиком угловой скорости, устройством выделения колебаний и формирователем компенсирующей команды. Ракета (второй вариант) снабжена вторым сумматором, а также в каждый канал первой и второй цепочек, в каждую из которых входят датчик угловой скорости, введены устройство выделения колебаний и формирователь компенсирующей команды. 4 н.п. ф-лы, 2 ил.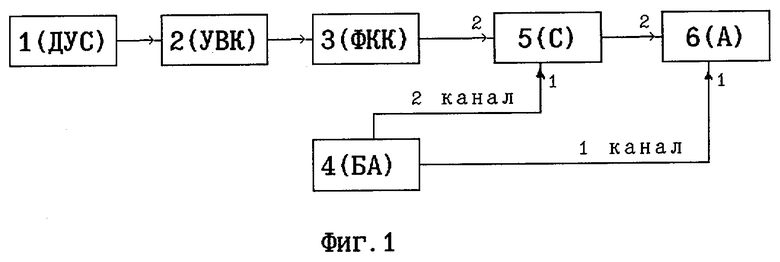
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

